
株式会社国際電気通信基礎技術研究所により出願された特許
81 - 90 / 905
ドライバ装置、それを備えた無線装置およびその無線装置を備えた無線通信システム
【課題】コンパクトなアンテナを用いて盗聴され難い秘密鍵を生成可能なドライバ装置を提供する。
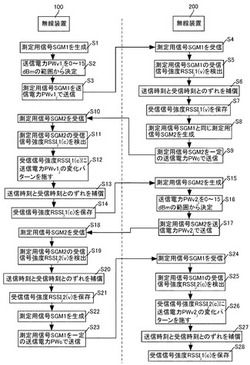
【解決手段】無線装置100は、送信電力PWv1jで測定用信号SGM1を送信し、無線装置200は、測定用信号SGM1の受信信号強度RSSIj1(v)を検出して保存する(ステップS1〜S7)。そして、無線装置200は、一定の送信電力PWcで測定用信号SGM2を送信し、無線装置100は、測定用信号SGM2の受信信号強度RSSIj1(c)を検出し、送信電力の変化パターンを受信信号強度RSSIj1(c)に施して保存する(ステップS8〜S14)。その後、無線装置100,200は、相互の動作を入れ換えて実行する(ステップS15〜S28)。無線装置100,200は、上記の動作を所定回数だけ実行して取得した複数の受信信号強度を2値化して相互に同じ秘密鍵を生成する。
(もっと読む)
遠隔操作ロボット

【構成】 遠隔操作ロボット(10)は、柔軟素材からなり、人間のミニマルデザインに基づいた外観を有する外被(12)を含む。外被は、胴体部分と、頭部分と、腕部分と、脚部分とを含む。外被内にはロボット機構体(14)が収納され、ロボット機構体と外被との間には詰め物(30)が設けられる。ロボット機構体は、胴体部分などに対応する位置に形成される胴体機構(17)などを含む。外被はさらに、頭部分の前面に形成された口部分および目部分を含み、ロボット機構体の口機構(23)が口部分を動かし、目機構(25)は目部分を動かす。スピーカ(32)からは遠隔操作者の音声が出力される。マイク(34)は対話者の音声を取得する。
【効果】ロボットは人間には見えるけれども、性別や年齢は自由に想像できる人間のミニマルデザインに従った外形を有し、しかもロボットから操作者の声がでるので、対話者は、ロボット自体を操作者と強く実感できる。
(もっと読む)
相対測位装置、および相対測位方法
【課題】端末間の相対位置を精度高く取得できなかった。
【解決手段】GPS信号受信部と、受信SNR等の自端末に関する情報である2以上の衛星ごとの自端末衛星情報群を有する自端末情報群を取得し、自端末情報群のうちの一部または全部の情報を送信し、受信SNR等の他端末に関する情報である2以上の衛星ごとの他端末衛星情報群を有する他端末情報群のうちの一部または全部の情報を受信し、2以上の衛星ごとの自端末衛星情報群のうちの1以上の情報、および2以上の衛星ごとの他端末衛星情報群のうちの1以上の情報を用いて、衛星ごとに相関性が高いか否かを判断する相関性判断部と、相関性が高いと判断された衛星の信号を用いて、相対位置を取得し、出力する相対測位装置により、相関性が高い衛星の情報を用いて、端末間の相対位置を精度高く取得できる。
(もっと読む)
状態認識装置、傾聴対話持続システム、状態認識プログラムおよび状態認識方法
【構成】傾聴対話持続システム100に含まれるPC10は、ロボット12の腹部カメラ14およびモニタカメラ22によって撮影された画像とマイク20によって集音された音声とから、ユーザの行動データを取得する。また、特定のユーザの行動データからサンプリングされた個人学習サンプルおよびSVMを構築するための一般学習サンプルに基づいて、境界線(超平面)の位置が調整された個人化SVMが構築される。そして、個人化SVMに、特定のユーザの行動からサンプリングされた認識サンプルが入力されると、特定のユーザの集中状態が認識される。
【効果】PC10は、特定のユーザの集中状態を容易に正しく認識できる。
(もっと読む)
歩車間通信システム
【課題】従来、歩行者端末で、歩行者の行動や周辺状況から危険度を判定し、その危険度に応じて通信制御を行ない、注意喚起することができなかった。
【解決手段】自歩行者コンテクスト情報、他歩行者コンテクスト情報、車両コンテクスト情報のうちの1以上の情報であるコンテクスト情報を取得するコンテクスト情報取得部と、コンテクスト情報が有する少なくとも一部の情報である歩行者端末情報を送信する歩行者端末情報送信部と、前記コンテクスト情報を、危険度を判定するための危険判定情報に適用し、前記歩行者の危険度を取得する危険度取得部と、危険度に応じて、歩行者端末情報を送信するか否か、または歩行者端末情報の送信方法を変更する歩行者端末により、危険度判定を行ない、それによって通信制御を行ない、注意喚起することができる。
(もっと読む)
アンテナ装置およびそれを備えた受信機
【課題】所望波の電力レベルをできる限り大きくすることが可能なアンテナ装置を提供する。
【解決手段】パワーインバージョン手段30は、判定手段60によって干渉波が検出されると、干渉波の周波数帯を有する受信電波に基づいて、干渉波の方向にヌルを形成するときのウェイトを演算し、その演算したウェイトが得られるときの振幅Ai(1≦i≦K)および位相φiを演算する。スイッチ制御手段40は、閾値Ithよりも大きい振幅A1〜Anのウェイトを有するアンテナ1〜nに対応付けられたn個のスイッチをオンし、(K−n)個のスイッチをオフする。最適位相生成手段50は、振幅A1〜Anに対応する位相φ1〜φnを初期位相値として開始し、所望波の到来方向から受信した受信電波の希望信号対干渉雑音電力比が基準値以上になるようにn個の可変移相器に設定するn個の位相を最適化する。
(もっと読む)
アンテナ装置およびそれを備えた受信機
【課題】干渉波を十分に除去可能なアンテナ装置を提供する。
【解決手段】副アンテナ装置20は、可変移相器21〜2Kの位相を制御してアンテナ1〜Kから放射される放射ビームの指向性を順次変化させて干渉波を検出するとともに、干渉波の到来方向を検出する。そして、主アンテナ装置10は、副アンテナ装置20から干渉波を検出したことを示す干渉波検出信号を受けると、可変移相器11〜1Kの位相を制御して副アンテナ装置20から受けた干渉波の到来方向にヌルを形成した放射ビームを形成し、電波を受信する。
(もっと読む)
生活空間の見守りシステム
【構成】 見守りシステム10は、家16(生活空間)の中に音センサデバイス18を設置し、音センサデバイスのマイクロコントローラ18bは、音センサ18aの音信を処理することによって、時間および周波数の両方向において簡略化したスペクトログラムを生成す。このスペクトログラムはホームゲートウェイ14からネットワーク12を通して見守りサーバ20に伝送される。見守りサーバでは、簡略化したスペクトログラムに対して複数のフィルタを掛け、それによるスコア値を算出し、各フィルタのスコア値から、生活空間および/または対象者の状況を認識する。
【効果】対象者のプライバシを十分に考慮しつつ、具体的な状況を認識できる。
(もっと読む)
計測装置,計測方法および計測プログラム
【課題】 複数のレーザレンジファインダで対象を計測して多様な情報を得る。
【解決手段】 計測装置(10)はコンピュータ(12)および7台のRLF(14)を含み、コンピュータが動く対象(Obj)を7台のLRFで計測する。7台のLRFのうち3つはそのスキャン面(Scn)が水平面に対して傾斜した傾斜LRF14iであり、他の4台はそのスキャン面が水平面と平行な水平LRF14hである。コンピュータのデータベース(52)には対象の3次元形状モデル(M1,M2,…)が登録されており、コンピュータのCPU(12c)は、各水平LRF14hからの計測データ(2次元距離情報)に基づいて対象の水平位置を推定し(S35)、各傾斜LRF14iからの計測データとデータベースに登録された3次元形状モデルとの比較に基づいて対象の3次元形状を推定し(S47)、そして3次元形状に基づいて対象Objを認識する(S49)。
(もっと読む)
記録制御装置および記録制御プログラム
【構成】 記録制御装置102はCPU102aを含み、CPU102aは、記録制御処理を開始すると、環境センサ106からの検出信号に基づいて、記録開始トリガが発生したかどうかを判断する。記録開始トリガが発生すると、CPU102aは、検出範囲にロボット12および人間の少なくとも一方を含む環境センサ106からの検出信号のセンサ情報DB104への記録を開始する。また、CPU102aは、環境センサ106からの検出信号に基づいて、記録終了トリガが発生したかどうかを判断する。CPU102aは、記録終了トリガが発生したとき、これに対応する記録開始トリガが発生したときに記録を開始された環境センサ106の検出信号の記録を終了する。
【効果】 必要に応じて必要なセンサからの検出信号のみを記録することができる。
(もっと読む)
81 - 90 / 905
[ Back to top ]