
株式会社国際電気通信基礎技術研究所により出願された特許
51 - 60 / 905
受信装置、フィードバック方法、及びプログラム
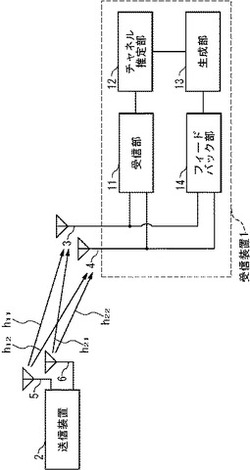
【課題】フィードバック対象であるチャネル推定結果のデータ量を削減できる受信装置を提供する。
【解決手段】送信装置が1以上の送信アンテナから送信したリファレンス信号を、1以上の受信アンテナを介して受信する受信部11と、受信部11が受信したリファレンス信号を用いて、1以上の送信アンテナと1以上の受信アンテナとの組み合わせに応じたチャネルについて周波数領域のチャネル推定値を取得するチャネル推定部12と、チャネル推定部12が取得した周波数領域のチャネル推定値を逆フーリエ変換して、チャネルを構成する各パスの振幅と位相と遅延間隔とを含む遅延プロファイルを生成する生成部13と、生成部13が生成した遅延プロファイルを送信装置に送信するフィードバック部14と、を備え、生成部13は、振幅及び遅延間隔の少なくとも一部を除いた遅延プロファイルを生成する。
(もっと読む)
通信システム、通信装置、通信方法、及びプログラム

【課題】伝送品質の低下を回避可能な通信システムを提供する。
【解決手段】通信装置1は、複数の周波数帯域でスペクトラム分割シングルキャリア変調方式により送信する送信部11、受信部12、複数の空き周波数帯域を取得する取得部13、伝送路特性取得用の通信データを複数の空き周波数帯域で送信させ、伝送路特性のよい周波数帯域を示す通信データが受信された際に、その特性のよい複数の周波数帯域で送信させる制御部14を備える。通信装置2は、複数の周波数帯域でスペクトラム分割シングルキャリア変調方式により送信する送信部21、受信部22、受信された伝送路特性取得用の通信データに応じた伝送路特性を取得する伝送路特性取得部23、伝送路特性のよい周波数帯域を選択する選択部24、選択された周波数帯域を、その周波数帯域を用いて送信させる制御部26を備える。
(もっと読む)
動作練習支援装置及び動作練習支援方法
【課題】学習者の動作練習の効果を高めると共に、熟練者に必ずしも頼らなくても練習が可能な動作練習支援装置及び動作練習支援方法を提供すること。
【解決手段】学習者が練習する際の学習者動作に合わせて可動する第1可動手段と、学習者が練習する際に参考となる参考動作を、該第1可動手段に伝達する参考動作伝達手段とを備えた構成において、該参考動作伝達手段には、該参考動作と該学習者動作とに偏差が生じた時に、所定の弾性係数によって該偏差に応じた弾性力を発生させる参考動作弾性力発生手段と、該参考動作弾性力を、該第1可動手段に付勢する参考動作付勢手段とを備え、学習者に対して、参考動作と自己の動作との偏差を弾性力として伝えるようにする。
(もっと読む)
通信装置、通信方法、及びプログラム
【課題】あらかじめ通信帯域を予約できる通信装置を提供する。
【解決手段】空き周波数帯域を用いて通信を行う通信装置1は、通信データを、複数の周波数帯域を用いて、スペクトラム分割シングルキャリア変調方式により送信する送信部11と、通信に用いられていない周波数帯域である複数の空き周波数帯域を取得する取得部13と、他の装置との間で通信するデータである実体通信データが通信されない場合に、通信帯域を予約するための予約通信データを、取得部13が取得した複数の空き周波数帯域を用いて送信部11に送信させ、実体通信データが通信される場合に、予約通信データの送信を終了させ、実体通信データが、予約通信データによって予約されていた複数の周波数帯域を用いて通信されるようにする制御部17とを備える。
(もっと読む)
歩行者状態分類装置およびプログラム
【構成】 歩行者の歩行者状態分類装置10は、LRF221‐22nによって各歩行者の位置を検出する。コンピュータ12は、各歩行者の単位時間毎の位置に基づいて各歩行者の平均歩行速度(vtnハット)と歩行方向のばらつき(dtn)を計算し、平均歩行速度が閾値より大きくかつ歩行方向のばらつきが閾値より小さい歩行者の歩行者状態を直行状態と分類する。平均歩行速度が閾値より小さいかと歩行方向のばらつきが閾値より大きいとき、コンピュータ12は歩行者が特定のターゲットに閾値以上の時間注目したかどうか判断し、そうでないとき、その歩行者の歩行者状態を回遊状態と分類する。
【効果】各歩行者の歩行者状態を的確に分類できる。
(もっと読む)
ロボットシステムおよびそれに用いる空間陣形認識装置
【構成】 ロボットシステム100は、ロボット10およびモーションキャプチャシステム12を含む。ロボットシステム100では、ロボット10および人の位置、体の向きおよび視線方向を用いてロボット10と人との空間陣形を分析し、ロボット10および人の対話参加状態を認識する。そして、認識した対話参加状態に応じて、ロボット10が適宜の行動を取ることによって、ロボット10および人の双方が対話参加状態になるようにした後、ロボット10が人に対して挨拶発話を行う。
【効果】 双方が対話参加状態となる空間陣形を生成した後に挨拶発話を実行するので、ロボットは人との対話を自然に開始でき、円滑にコミュニケーションを図ることができる。
(もっと読む)
コミュニケーションロボット
【課題】人で混雑した環境にも適応できる多様なコミュニケーションを提供すること。
【解決手段】コミュニケーションロボット10は、密集度DBを含み、人と共存する様々な環境に配置されて様々なコミュニケーション行動を実行する。密集度DBには、環境を区分したエリアのそれぞれと対応付けて、当該エリアにおける密集度の許容値が記憶される。コミュニケーションロボット10は、コミュニケーション行動を実行する際には、自身の現在地を取得するとともに、その現在地が含まれるエリアの現在の密集度を取得する。そして、現在地が含まれるエリアの密集度が当該エリアに対応する許容値以上か否かを判断し、その判断結果に従って、コミュニケーション行動の実行を制御する。
(もっと読む)
車載表示装置の輝度制御装置、輝度制御プログラムおよび輝度制御方法
【構成】 輝度制御装置10はコンピュータ12を含み、コンピュータ12のCPU12aは、第1カメラ14の撮影画像から運転者の視線方向を検出する。また、第2カメラ16の撮影画像から運転者の視認可能な範囲の輝度分布を算出する。さらに、視線方向から運転者の注視輝度を検出する。運転者が車載表示装置20を見ている場合には、その後に車外等に移動される視線方向における輝度を考慮して、その車載表示装置20の輝度が制御される。また、視線が車外から車載表示装置20に移動された場合には、その車載表示装置20の輝度は、それまで見ていた位置の注視輝度と同等にされる。したがって、眼の順応が速い。また、視線が車外に向けられている場合には、その車載表示装置20の輝度は、低下される。したがって、反射やグレアによる影響がほとんどない。
【効果】 輝度の適切な制御により、快適な運転環境を提供できる。
(もっと読む)
移動ロボット、移動ロボット用の学習システムおよび移動ロボットの行動学習方法
【構成】 移動ロボット10は、周囲反応情報データベース88を備え、イベント会場や街中などの人と共存する様々な環境に配置され、案内および荷物運搬などの様々なサービスを提供する。そして、サービスを提供する際には、複数種類の移動の仕方によるサービスの提供を試み、自身の行動に対する周囲の人の反応状況から適切な行動を学習して、その後のサービスの提供に生かす。
【効果】 周囲の人の反応状況から適切な行動を学習するので、人と共存する環境において効果的にサービスを提供できる。
(もっと読む)
利用記録システム
【課題】様々な設備の利用状況を簡単かつまとめて把握できるシステムを提供する。
【解決手段】利用記録システム10は、サーバ12と、ネットワーク14を介してサーバ12と通信可能な携帯端末16とを含み、携帯端末16を所持するユーザによる設備の利用状況を記録する。携帯端末16のGPS回路は、携帯端末16の現在位置を所定時間ごとに検出して、検出時刻に関連付けた位置データを取得する。そして、その位置データに基づいて、携帯端末16を所持するユーザの位置履歴が記録される。サーバ12は、ユーザの位置履歴と、設備ごとに設定された設備データとを参照して、設備の有効領域内にユーザが有効時間以上存在しているか否かを判定し、その判定結果に基づいて、ユーザが設備に対して利用行動を実行したかどうかを推定する。そして、ユーザが設備に対して利用行動を実行したと推定したときに、設備とユーザとを関連付けた利用履歴を記録する。
(もっと読む)
51 - 60 / 905
[ Back to top ]