
学校法人立命館により出願された特許
111 - 120 / 359
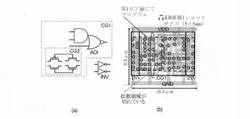
半導体装置及びその製造方法
【課題】従来よりも少数のLEを用いてより小面積のDFFを構成できる、ビアパターンによって論理を変更可能な半導体装置及びその製造方法を提供すること。
【解決手段】半導体装置の製造方法は、
複数のトランジスタと、これらに接続された第1メタル層とが形成された基板において、第1メタル層の上に、第1ビアパターンを含む第1ビア層を形成する工程と、
第1ビア層の上に第2メタル層、第2ビア層および第3メタル層を形成する工程と、
第3メタル層の上に、第3ビアパターンを含む第3ビア層を形成する工程とを含み、
複数の前記トランジスタによって基本論理素子が構成され、
基本論理素子が、2つのN型トランジスタ及び2つのP型トランジスタ(CS2)と、1つのAOIゲート(AOI)と、2つのインバータ(INV)とを備え、
第1ビアパターンによって基本論理素子の論理を決定し、
第3ビアパターンによって基本論理素子間の配線を決定する。
(もっと読む)
窒化物半導体薄膜の製造方法

【課題】基板上に金属と活性窒素種とを供給して反応させる窒化物半導体薄膜の製造方法において、金属と活性窒素種との供給比率を容易に制御可能とし、且つ、結晶品質や表面平坦性に優れた窒化物半導体薄膜を形成可能とする手段を提供する。
【解決手段】窒化物半導体薄膜の製造方法は、インジウムをストイキオメトリ条件Sを越えて過剰に供給する金属過剰供給工程と、該金属過剰供給工程で基板10の上に析出したインジウムドロップレット15を、活性窒素種12をストイキオメトリ条件Sに達するまで供給することによってインジウムナイトライド層16に転換するドロップレット転換工程と、を含む。
(もっと読む)
カラーマネジメントシステム及びプログラム
【課題】観察者・照明光・画像デバイスのいずれにも依存せずに「等しい色の見え」を実現するための技術を提供する。また、測定機器を用いることなく、誰でも簡単に画像デバイスのキャリブレーションが可能な技術を提供する。
【解決手段】本発明では、1個又は複数個の色票(反射物体)を用いる。そして、色調整用画像を画像デバイスに出力し、色票と色調整用画像の色の見えが同じになるように色調整用画像の色を観察者に調整させることで、その観察者の個人差、その観察者の照明光への色順応状態、及び、その画像デバイスの特性が反映された色値を取得し、その色値に基づいて色変換用のパラメータを作成する。
(もっと読む)
トレーニング装置
【課題】高速な運動動作での筋力トレーニングにおいて、最大動作速度をほとんど減少させることなく、効果的な負荷を与えることができるトレーニング装置を提供する。
【解決手段】 操作部2に加わる負荷、及び予め目標として設定される仮想慣性、仮想粘性、仮想弾性に基づいて、前記操作部の目標角度、目標角速度、及び目標角加速度を算出し、この目標角度、目標角速度、目標角加速度、操作部2の回転角度、及び角速度に基づいて生成される制御信号により操作部2に発生させる負荷を制御するトレーニング装置1であって、操作部2が所定の角度に到達するまでの間は、前記仮想粘性に目標角速度を乗じた負荷に、前記仮想慣性に目標角加速度を乗じた負荷を加算した負荷を操作部2に発生させ、操作部2が所定の角度に到達した後は、前記仮想慣性を当該仮想慣性よりも低い値に変更した負荷を操作部2に発生させるトレーニング装置1。
(もっと読む)
半導体装置
【課題】層構造の設計指針を得ることにより、窒化物半導体チャネル層としてInN(あるいはInGaN、InAlN、InAlGaN)を用いた、高性能のInN系ヘテロ構造電界効果トランジスタ(チャネル層がInN系であるヘテロ構造電界効果トランジスタ)を実現させること。
【解決手段】窒化物チャネル層半導体1の上に窒化物障壁層半導体2を重ねてなるヘテロ構造上に、ソース電極3、ゲート電極4、ドレイン電極5が配置されてなるInN系ヘテロ構造電界効果トランジスタにおいて、窒化物チャネル層半導体1としてInN、InGaN、InAlN、あるいはInAlGaNが用いられ、窒化物障壁層半導体2としてInXAl1−XN(ここに、0<X≦0.66である)が用いられていることを特徴とするInN系ヘテロ構造電界効果トランジスタを構成する。
(もっと読む)
バイオオーグメンテーションにおける環境影響の評価方法
【課題】バイオオーグメンテーションの実施において、投入した炭化水素分解菌が環境に与える影響を適切に評価すること。
【解決手段】炭化水素分解菌の土壌投入が環境に与える影響の評価方法であって、
(1)汚染土壌について、
(1-1)炭化水素分解菌を投入し、
(1-2)前記(1-1)の投入後の土壌からDNAを抽出し、
(1-3)前記(1-2)で抽出したDNAを用いて下記(1a)〜(1c):
(1a)土壌バクテリア数、
(1b)Real-time PCR法により得られる炭化水素分解菌数、及び、
(1c)PCR-DGGE法により得られる土壌バクテリアDNAのバンドパターン
を測定し、
(1-4)前記(1-3)で得られた(1a)〜(1c)の測定結果に基づき、汚染土壌における環境浄化又は回復効果を評価する工程、
かつ、
(2)非汚染土壌について、
(2-1)炭化水素分解菌を投入し、
(2-2)前記(2-1)の投入後の土壌からDNAを抽出し、
(2-3)前記(2-2)で抽出したDNAを用いて、下記(2a)〜(2c):
(2a)土壌バクテリア数、
(2b)Real-time PCR法により得られる炭化水素分解菌数、及び、
(2c)PCR-DGGE法により得られる土壌バクテリアDNAのバンドパターン
を測定し、
(2-4)前記(2-3)で得られた(2a)〜(2c)の測定結果に基づき、非汚染土壌における環境影響を評価する工程
を有することを特徴とする環境影響評価方法、並びに、前記評価方法により得られる結果を用いた汚染土壌の浄化又は回復方法、及び炭化水素分解菌のスクリーニング方法。
(もっと読む)
動力義肢の制御方法、及び当該方法が適用された動力義肢
【課題】患肢に装着した動力義肢において、従来は不可能であった巧緻な随意的運動を実現可能とする動力義肢の制御方法及びこれを適用した動力義肢を提供する。
【解決手段】上肢若しくは下肢の一部若しくは全部を欠損した患肢Aと、随意的に動かし得る関節Hとを有する人体に適用される動力義肢1を制御するための方法であって、随意的に動かし得る関節の一又は複数の関節変位を、計測手段3により第1の関節変位として計測するステップと、第1の関節変位の一般化座標空間から動力義肢1の関節変位の一般化座標空間への適切な写像を演算手段5により演算し、第2の関節変位として算出するステップと、第2の関節変位を目標値として、制御手段4、10、20により患肢に適用した動力義肢の一又は複数の関節変位制御を行なうステップと、からなることを特徴とする動力義肢の制御方法及びこれを適用した動力義肢とする。
(もっと読む)
音声認識用マイクロホンシステム
【課題】本来音声認識用マイクロホンによってのみ受信されるべき音声が騒音除去用の騒音信号に混入してしまうことを抑制する。
【解決手段】騒音源11を内包するロボット筐体10の表面に設置された騒音用マイクロホン12は、エンクロージャー13によって覆われることにより、オペレータが発声した音声が入らぬ様、遮音されている。ロボット筐体10外部には、音声用マイクロホン14が設置されている。騒音用マイクロホン12が受信した振動音を騒音に変換するための周波数特性補正用フィルタ25の伝達が、騒音推定手段26にセットされている。騒音推定手段26は、騒音用マイクロホン12からの振動音観測信号に周波数特性補正用フィルタ25を施すことにより、騒音を推定する。騒音除去手段27は、音声用マイクロホン14からの観測信号及び推定された騒音に基づいて2チャンネルスペクトルサブトラクション法による処理を実行する。
(もっと読む)
多脚歩行式移動装置のハイブリッド制御装置及び手法
【課題】不整地のような未知の環境においても、任意の脚部制御とオートバランス制御とのそれぞれを同時に実行可能とする。
【解決手段】複数の脚で歩行する多脚歩行式移動装置において、任意の脚部制御と、バランス維持を自動で行なうためのオートバランス制御とを同時に実行するハイブリッド制御装置を備え、ハイブリッド制御装置は、足部の接地状態に応じて脚部制御とオートバランス制御との非干渉化を静力学的に行なう。
(もっと読む)
バイオレメディエーションのための浄化シミュレーション方法
【課題】バイオレメディエーションにおける浄化速度を予測することができる浄化シミュレーション方法を提供すること。
【解決手段】汚染土壌に含まれる油および該油の濃度を特定する第1ステップ(S1)と、
前記汚染土壌に投与する微生物および栄養塩を指定する第2ステップ(S2)と、
特定された前記油、指定された前記微生物および栄養塩の組に対応する前記微生物の増殖定数、増殖速度および収率係数を決定する第3ステップ(S3)と、
投与する前記微生物の量、前記油の濃度、および予測時刻を指定する第4ステップ(S5)と、
投与する前記微生物の量、前記油の濃度、前記増殖定数、前記増殖速度および前記収率係数を、前記微生物の増殖に関する第1方程式および前記油の減少に関する第2方程式に適用し、前記第1方程式および第2第2方程式を数値計算によって解き、前記予測時刻における前記微生物の量を計算する第5ステップ(S6、S7)とを含む。
(もっと読む)
111 - 120 / 359
[ Back to top ]