
Fターム[2B033AB11]の内容
土作業機(ロータリ) (5,852) | 配置による型式 (1,512) | 単軸型 (691)
Fターム[2B033AB11]に分類される特許
201 - 220 / 691
耕耘爪
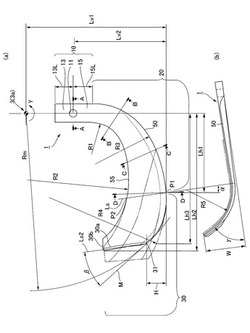
【課題】使用により摩耗しても耕耘性能が低下し難い耕耘爪を供する。
【解決手段】耕耘軸3に取り付けられる取付基部10と、取付基部10に連続する縦刃部20と、縦刃部20に連続する横刃部30とを有し、縦刃部20から横刃部30にかけて回転方向と逆向きに湾曲されているとともに、横刃部20が一側方に折曲されている耕耘爪1であって、折曲開始線Lsは、耕耘爪1を耕耘軸3に取り付けた状態で横刃部20の折曲開始線L2と刃縁部50との交点P1がほぼ最下端位置となるように配置したときの耕耘軸心3a方向の側面視において、取付基部10と反対側に向かって所定の傾きを有し、切削幅Wは、耕耘爪1を耕耘軸3に取り付けた状態で横刃部20の折曲開始線Lsと刃縁部50との交点P1がほぼ最下端位置となるように配置したときの耕耘軸心3a方向の側面視における刃縁部50の先端部と交点P1との垂直距離の約2倍の関係にあること。
(もっと読む)
歩行型耕耘機

【課題】泥除け板への泥の付着を抑制することのできる歩行型耕耘機を提供する。
【解決手段】歩行型耕耘機1は、下方に突出する伝動軸19を有するエンジン3と、エンジン3に取付けられて下方に伸び伝動軸19から伝達される回転を伝動軸19の軸方向と略垂直方向に延びる耕耘軸5から出力するギヤケース2と、ギヤケース2にフレーム4とハンドルブラケットを介して取付けられる操縦ハンドルと、耕耘軸5の回転動力により駆動される耕耘刃6と、エンジン3と耕耘刃6との間に設けられ、耕耘刃6に対向する面にフッ素を含有する樹脂が塗布されたフッ素樹脂コーティング面23を有する、耕耘刃6を覆う泥除け板7と、を備える。
(もっと読む)
管理機
【課題】容易に畝底から畝上へ、または、圃場から畦上等に乗り上げることが可能となる管理機を提供する。
【解決手段】車輪30・30に対して前後一側に耕耘装置40を配置し、前記前後他側にエンジン12を配置し、ハンドル52をエンジン12上方に振替可能に構成し、前記前後他側に走行補助具60を配置した管理機1であって、走行補助具60は、エンジン12を載置する支持フレーム11に基部側が回動自在に支持され、先端側が側面視そり状に形成されて前記前後他側に突出される接地部材と、接地部材と支持フレーム11の間に介装されて接地部材が下方に回動するように付勢する付勢部材とを備える。
(もっと読む)
農作業機
【課題】適切な耕耘整地作業ができる農作業機を提供する。
【解決手段】農作業機1は、耕耘作業をする耕耘体11と、この耕耘体11の上方部を覆うカバー体16とを備える。農作業機1は、耕耘体11の後方で整地作業をする整地体21と、耕耘体11の前方で砕土作業をする砕土体31とを備える。砕土体31は、カバー体16の前端部に取り付ける。砕土体31は、耕耘体11の前方で砕土作業をする砕土棒状部43を有する。
(もっと読む)
耕耘装置
【課題】本発明の課題は、耕耘爪軸を回転させる動力を無駄に消費せずに、揚土作業を効率よく行うことができる耕耘装置を提供することを目的とする。
【解決手段】耕耘ケース41から左右方向へ突出される耕耘爪軸42と、前記耕耘爪軸42に取り付けられて、当該耕耘爪軸42の軸心方向に並置される複数の耕耘爪10と、を備える揚土作業を行う耕耘装置40Aであって、前記複数の耕耘爪10のうち、前記耕耘ケース41の左右両側で軸心方向最外側以外の耕耘爪を、前記耕耘爪軸42の周方向に延びる途中で軸心方向外側に曲がる揚土用の爪(第二耕耘爪12)とし、最外側の耕耘爪を、前記耕耘爪軸42の軸心方向と直交する面に対して平行な直平部11dを有する爪である平板形状の爪(第一耕耘爪11)とするものである。
(もっと読む)
管理機
【課題】ロータリカバーの回動位置を作業状況に応じて容易に調節することができる管理機を提供する。
【解決手段】エンジン11と、前記エンジン11の前方に配置されるミッションケース13と、前記ミッションケース13の下方に配置される駆動輪15と、前記ミッションケース13の後方に配置されるロータリ耕耘装置2と、前記ミッションケース13の上部から前方へ突出されるハンドル19と、を備える管理機1において、前記ロータリ耕耘装置2は、前記ミッションケース13から後方へ延出されるロータリフレーム24と、前記ロータリフレーム24に対して上下に回動可能に支持されて耕耘爪23の上部を覆う上カバー31・32と、前記上カバー31・32の左右外側に上下に回動可能に支持されるサイドカバー33と、を有し、前記サイドカバー33を上下に回動操作可能な操作具を前記サイドカバー33の前部に設ける。
(もっと読む)
農作業機
【課題】耕耘体の耕耘深さを容易に目視確認できる農作業機を提供する。
【解決手段】農作業機1は、トラクタTに連結する機体2を備える。機体2には、耕耘作業をする耕耘体11を設ける。機体2には、耕耘体11の上方部を覆うカバー体16を設ける。カバー体16の後端部には、耕耘体11の後方で整地作業をする整地体21を設ける。カバー体16の前端部には、トラクタTに乗った作業者が耕耘体11の耕耘深さAを目視確認するための目印手段31を設ける。目印手段31は、左右方向に並んで位置しそれぞれの下端が異なる高さに位置する複数の目印部36を有する。
(もっと読む)
農作業機
【課題】耕耘体と整地体との間の空間部内に溜った土が耕耘体の回転の妨げとなることを防止できる農作業機を提供する。
【解決手段】農作業機10は、回転しながら耕耘作業をする耕耘体と、この耕耘体の後方で整地作業をする整地体21とを備える。農作業機10は、耕耘体と整地体21との間の空間部の側面を覆う側板体31を備える。側板体31は、弾性板32からなり、空間部内に溜った土から受ける力で弾性変形することにより空間部内に溜った土を空間部外に逃がす。
(もっと読む)
歩行型管理機
【課題】歩行型管理機を用いての畝立て作業を、機材の取り換えの手間を要することなく能率よく行えるようにする。
【解決手段】操縦ハンドルを後方に延出した走行機体に耕起ロータを装備し、走行機体に対する前進抵抗を加減する棒13を、走行機体の後部に下向きに取り付ける。上部が幅広で下部が幅狭の支持枠21を、棒13の前側で且つ耕起ロータの後側に位置するように棒13に取り付ける。上側ほど横外側となる傾斜した右及び左の横外縁を備えたゴム板で支持枠21よりも幅広の成形板22を、支持枠21に取り付けて、耕起ロータで耕起した土を走行機体の前進に伴って成形板22により押圧して畝を成形するように構成する。
(もっと読む)
歩行型耕耘機
【課題】非使用時における歩行型耕耘機の一層のコンパクト化を図り得る歩行型耕耘機を提供する。
【解決手段】歩行型耕耘機の作業用ハンドル3は、支持アーム10の後方に取り付けられ、上方へ延伸する接続杆34と、使用位置(P)において接続杆34よりも上側に位置付けられた左側支持杆32a及び右側支持杆32bと、これら左側支持杆32a及び右側支持杆32bの先端部位に設けられた左側把持部32a及び右側把持部32bと、右側把持部32bに設けられた操作部33と、接続杆34及び左側支持杆32a及び右側支持杆32bとを回転可能に接続する回転機構35とを有している。
(もっと読む)
ガスエンジン型管理機
【課題】ボンベ取付部の接続部周りを一体に保護するカバー部材を備えたガスエンジン型を提供する。
【解決手段】ガスエンジン9の前部上方には、ガスボンベを取付けるボンベ取付部20がガスエンジン9の幅方向に沿って機体横方向に取付けられており、ボンベ取付部20の機体右側端には、燃料配管が取付けられると共に、該燃料配管への燃料ガスの供給を入切する燃料コック23を備えた接続部が設けられている。また、燃料配管の下方には、スロットルワイヤが配設されており、これらスロットルワイヤ、燃料配管及び燃料コック23は、サイドカバー32によって一体に覆われている。
(もっと読む)
ガスエンジン型管理機
【課題】埃などが侵入しないようにボンベケースを覆うカバーを備えたガスエンジン型管理機を提供する。
【解決手段】ガスエンジンの前部上方には、ガスボンベを横方向に載置した状態で支持するボンベケース21が設けられており、このボンベケース21は、後方側から前方上部に亘ってボンネット30によって覆われている。また、ボンネット30の下方には、アンダーカバー31が取付けられている。アンダーカバー31は、ボンベケース21の前方下部を覆うフロント部31aと、ボンベケース21の底部を覆うアンダー部31bと、から構成されており、ボンベケース21の下方側から埃が舞い上がっても、ガスエンジンとボンベケース21との間に延設したアンダーカバー31のアンダー部31bによってボンベケース21の底部はおおわれているため、舞い上がった埃はボンベケース内に侵入することができない。
(もっと読む)
ロータリ耕耘機の溝切り装置
【課題】溝切りローラを一定姿勢で上下動可能にして、ロータリ耕耘機による畦ぎわからの耕耘作業を可能にした上で、適正な連続状の長溝を確実に形成できるようにする。
【解決手段】ロータリ機枠4の後部に支持枠14を後方突出状に設け、この支持枠14に上下一対の平行なリンク55、56を有する平行リンク具50の前部を連結し、この平行リンク具50の後部にキャスタ支持体51を設け、このキャスタ支持体51に耕耘跡を転動して連続状の長溝Lを形成する溝切りローラ7を設けている。
(もっと読む)
管理機
【課題】耕耘作業および培土作業を良好に行うことができる管理機を提供することを課題とする。
【解決手段】機体に回転自在に支持される車輪20と、前記機体に装着される耕耘装置30と、少なくとも一部(培土器40Aの前端)が車輪20の車軸21と耕耘装置30の耕耘軸31との間に位置するように配置される培土器40Aと、を具備する管理機1Aとして、耕耘装置30が上下方向へ移動する際、培土器40Aの少なくとも一部が同一方向へ移動するように構成する。
(もっと読む)
ロータリ耕耘機のスタンド装置
【課題】ロータリ耕耘機の上昇時にもトラクタへの接触干渉が起こらない状態で当該ロータリ耕耘機に対してスタンド具を保持できるようにし、もってスタンド具の置き忘れなどを防止できるようにする。
【解決手段】ロータリ耕耘機の機枠4に、長手方向を左右方向へ向けたツールバーを後端に有する支持枠14が後方突出状に備えられ、機枠4の左右少なくとも一方側に、接地部50が前後方向に長いスタンド具7を着脱自在に取り付ける取付部8が設けられており、ツールバーに左右一対の保持部9が設けられ、左右各スタンド具7にその長手方向をツールバーに略沿わせた状態で保持部9に着脱自在に保持される被保持部53が設けられている。
(もっと読む)
歩行型管理機
【課題】ゴムたれにより簡単に畝立て作業ができる歩行型管理機を提供する。
【解決手段】尾輪体30は、耕耘装置11から後方に突設される補助フレーム31と、補助フレーム31から下方へ突設される第一支持杆32と、前記第一支持杆に対して、回動可能に取り付けた第二支持杆33と、前記第二支持杆に回転可能に取り付けられる尾輪34と、前記第二支持杆を前記第一支持杆に対して、任意の回動位置に保持する保持手段50とを具備し、前記耕耘装置と前記尾輪体との間に、該耕耘装置を後方から覆うゴムたれ15を具備し、前記第二支持杆を、前記尾輪が前記耕耘装置の最下位置よりも上方に位置するように保持手段により保持した状態で、前記尾輪体を構成する第一支持杆は、前記ゴムたれの左右中央部に当接可能とし、前記ゴムたれの左右両側により、前記耕耘装置で掘り起こされた土壌を左右に押して、畝立て作業を可能とした。
(もっと読む)
歩行型作業機
【課題】耕耘軸を連結する車軸と駆動部との間に設けるサイドクラッチの噛み合いに、大きな耕耘負荷が生じても芯ずれを抑制できる歩行型作業機を提供する。
【解決手段】車軸の回転中心から第1半径R1の位置において、駆動部29及び車軸の一方に第1内凸部35を、他方に第2内凸部39を備え、車軸の回転中心から第1半径R1よりも大きい第2半径R2の位置において、駆動部29及び車軸の一方に第1外凸部36を、他方に第2外凸部40を備え、第1内凸部35と第2内凸部39、及び第1外凸部36と第2外凸部40とが咬合するようにサイドクラッチを構成し、第1内凸部35と第2外凸部40が近接又は接当し、第2内凸部39と第1外凸部36が近接又は接当するように第1半径R1及び第2半径R2を設定してある。
(もっと読む)
歩行型管理作業機
【課題】歩行型管理作業機の耕耘軸に補助車輪を簡単に着脱できるようにすること。
【解決手段】機体底部の耕耘軸の最も外側に位置する端部耕耘爪に、耕耘軸を中心とする円弧状の長孔を形成する。また耕耘爪の回転半径よりも径の大きい補助車輪には、その車軸よりも長さが短い連結ピンを設け、この連結ピンの頭部をその軸部の径より大きく形成する。
そして補助車輪の車軸を耕耘軸の取付穴に挿入し、連結ピンの頭部を、前記長孔の一部に形成した長孔の幅よりも大径の挿入口に挿通し、この状態で、耕耘軸に対し補助車輪を旋回して連結ピンを長孔の終端に嵌着する。
その際、連結ピンを補助車輪の側面の中心円板に設置し、連結ピンの頭部と中心円板との距離を端部耕耘爪の長孔付近の板厚と同程度に形成して、連結ピンと中心円板で、端部耕耘爪を内外から挟んで装着を確実にする。
(もっと読む)
止め具
【課題】 部品点数を少なくすると共に操作レバーを支持ブラケットに容易に組み付けることができるようにする。
【解決手段】 一端部がフック部材33に引っ掛けられた弾性引掛け部材37の他端部を、一端部と枢支軸35とを結ぶ線分Xを乗り越えさせて、操作レバー36の遊端側を第2部材若しくは支持ブラケット34に接当させることにより、フック部材33を弾性引掛け部材37で弾性的に引っ張るようにした止め具であって、支持ブラケット34は互いに対応する取付孔39を有する一対の起立片40を備え、操作レバー36は、一対の起立片40間に嵌合されかつ二叉状になっていて互いの離間幅が弾性変形により縮小可能とされた一対の嵌合片46を有し、一対の嵌合片46の外面に、対応する起立片40の取付孔39に挿入される前記枢支軸35が一体に突設されている。
(もっと読む)
歩行型作業機
【課題】歩行型作業機において放電回路、バッテリ、モータの安全性を確保する。
【解決手段】電流検出回路45は放電制御基板43の制御電流を検出し予め設定した設定電流値を超える状態が規定時間継続するとスイッチング回路46をOFF出力に切り換えてモータ駆動回路20を遮断側に切換わるよう構成し、前記放電制御基板43の出力端子から電動モータ8へのモータ駆動回路20途中に該モータ駆動回路20中の負荷電流が所定以上になるとモータ駆動回路20を電気的に遮断するブレーカ55を設ける。
(もっと読む)
201 - 220 / 691
[ Back to top ]