
Fターム[2B043AB08]の内容
農業機械一般(操向) (6,001) | 目的、効果又は機能 (649) | 操舵性の向上 (230) | 旋回性能又は操縦性 (174)
Fターム[2B043AB08]に分類される特許
121 - 140 / 174
コンバイン
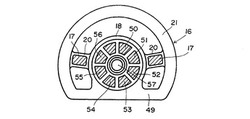
【課題】回転式の操向操作具に設けた進路変更手段によって進路変更操作を容易・確実にすると共に、スピン旋回を入り切りさせて誤操作を防止できるものとする。
【解決手段】旋回用の油圧式無段変速装置(40)の回転出力を、モニターを備えた操向操作具(16)の操作によって調節できるように構成する。そして、操向操作具(16)を左右いずれかに回転操作すると回転操作方向側のホイル軸(30)を減速させて旋回し、操向操作具(16)とは別の操作具の操作によってスピン旋回を入りにした状態で操向操作具(16)を更に回転操作すると左右のホイル軸(30,30)を互いに逆回転させてスピン旋回すると共に表示部(22)に操向操作具(16)の回転操作状態を表示するように構成する。更に、操向操作具(16)の回転操作によらずに機体を左右に方向修正することのできる進路変更手段(17)を設ける。
(もっと読む)
作業機の操向構造

【課題】 ステアリング操作具の操作に応じた機体旋回を行うことができるとともに、必要な時にのみ、より小回りの旋回を随意に行うことができる、操作性に優れた操向構造を提供する。
【解決手段】 ステアリング操作具72を操作することで左右のクローラ走行装置1に速度差を与えて、ステアリング操作具72が操作された方向に対応して機体を旋回させるように構成した作業機の操向構造において、復帰型の旋回モード変更操作具75を備え、この旋回モード変更操作具75を操作している間だけ、ステアリング操作具72の左右方向の操作量に応じて設定された左右のクローラ走行装置1の速度比を変更して旋回機能を高める旋回モードとなるように構成してある。
(もっと読む)
乗用作業車両
【課題】小回り旋回時の左右駆動輪、及び前後駆動輪に生じる旋回差を吸収して、旋回径に応じた駆動力を全ての車輪に伝達して機体を確実に旋回させることができる乗用作業車両を提供する。
【解決手段】後輪3、3を駆動する後輪駆動系40は、後輪減速装置60を介して走行駆動系25から駆動されるが、後輪減速装置60には、入力軸61と出力軸62とが同速となる経路と、減速となる経路との2つの経路を有しており、ステアリングハンドル10の操舵に連動して経路を切換えることができる。また、後輪駆動系40には、左右の後車軸69L、69Rを強制的に差動させる右左後輪用変速クラッチ71a、71bを有しており、小回り旋回の方向に応じて左右いずれかのクラッチが作動する。これにより、機体1が田面を小回り旋回する際には、旋回径に応じた駆動力を全ての車輪に伝達して、田面上をスリップすることなく、確実に小旋回することができる。
(もっと読む)
簡易乗用作業車
【課題】 作業部材を牽引することができる作業車であって、簡単に使用することができ、畝間や枕地が狭い圃場等においても操作性及び取扱性の良い、簡易乗用作業車を提供する。
【解決手段】 自動走行機体2と、該走行機体2で牽引される作業部材4を取り付けるための作業部材取付部3と、作業者Mが座席11で前記作業部材取付部3を作業休止時地上高H1と作業時地上高H2に昇降操作するための昇降操作装置6と、前記走行機体2の後部に配設された左右一対の持ち上げ用ハンドル7,7を備えている。そして、前記作業部材4を取り付けた状態において、前記左右一対の持ち上げ用ハンドル7,7によって前輪8を支点として後輪9,9が地面から浮き上がるまで前記走行機体2の後部を作業者Mが持ち上げられるように重量設定及び重量配分がなされている。
(もっと読む)
移植機
【課題】植付行程終了後に走行機体を自動旋回させるにあたり、直進走行中のスリップなどに起因する距離計測誤差を排除し、旋回開始タイミングのばらつきを可及的に小さくする。
【解決手段】ステアリングホイール24の操作に応じて走行機体1を操向するステアリング機構と、走行機体1に昇降自在に連結される植付部3と、該植付部3に対する動力供給を入切する植付クラッチとを備える乗用田植機において、ステアリング機構をアクチュエータの駆動力で作動させるステアリング作動機構27と、該ステアリング作動機構27を制御する制御装置33とを備えると共に、該制御装置33は、植付部3の上昇操作に基づいて植付けの終了を判断すると共に、植付終了判断後の経過時間に基づいて旋回開始タイミングを判断し、該旋回開始タイミング判断に応じてステアリング機構を自動的に旋回制御する。
(もっと読む)
作業機の操舵装置および操舵装置用プログラム
【課題】 ステアリング機構を有しない作業機であっても、トラクタの旋回時には自動的かつ確実に作業機を外向させることができ、トラクタが旋回状態から直進状態へ戻る場合には、作業機を素早くトラクタの後方へと追従させ進行方向を一致させることができる作業機の操舵装置および操舵装置用プログラムを提供する。
【解決手段】 トラクタ3の操作によって変化する数値に基づいて当該トラクタ3の旋回状況を検知する旋回状況検知手段15が旋回開始を検知すると、ヒッチ角度増減手段13を制御して作業機2がトラクタ3の旋回方向に対して外向するようにヒッチ角度を増減し、旋回状況検知手段15が旋回終了を検知すると、ヒッチ角度増減手段13を制御してヒッチ角度が基準オフセット値となるように増減させる。
(もっと読む)
コンバイン
【課題】簡単な構造からなる走行用HSTと旋回用HSTを備えた走行トランスミッションを具備するコンバインを提供すること。
【解決手段】左右一対の走行クローラ(3)へ走行駆動力を伝動する走行用無段変速手段(20)と該左右一対の走行クローラ(3)に速度差を与える旋回用無段変速手段(70)とを設ける。該走行用無段変速手段(20)及び旋回用無段変速手段(70)をポートブロック(22)に設置する。走行用無段変速手段(20)における走行用可変容量油圧ポンプ(21)と走行用油圧モータ(23)を結ぶ油圧回路(22a)と旋回用無段変速手段(70)における旋回用可変容量油圧ポンプ(71)と旋回用油圧モータ(73)を結ぶ油圧回路(22b)とをポートブロック(22)内に設ける。該走行用無段変速手段(20)と旋回用無段変速手段(70)とを単一のユニットとして走行トランスミッション(19)のケースに着脱自在に取り付ける。
(もっと読む)
作業用車両
【課題】小回り旋回をすることができるものにおいて、構造を簡素にでき、小形化できるとともに、走行装置の回転速度を滑らかに変化させて安定性よく旋回することができる作業用車両を提供する。
【解決手段】エンジン6が搭載された機体と、該機体の進行方向に対して両側に配され該機体を支持する第1及び第2の走行装置1,2と、エンジン6の回転を無段階に変速する無段変速機16と、無段変速機16が変速した回転動力を第1及び第2の走行装置1,2に伝動する第1及び第2の差動機構18,19と、一つの電動モータ21と、該電動モータ21の駆動力を、電動モータ21の伝動経路を切換えて第1又は第2の差動機構18,19に伝動する切換伝動機構22とを備え、一つの電動モータ21により小回り旋回を可能にした。
(もっと読む)
進路矯正型走行車
【課題】片側の前車輪が傾斜面を登ろうとすると、後車輪側が舵を取らず前方を向いたままの状態で保持されると共に、本体部も速やかに動作して鉛直方向を維持でき、前車輪の動作が規制されることなく、前車輪側が円滑に舵を取ることができ、進路に沿って速やかに矯正しながら走行することができる進路矯正型走行車を提供する。
【解決手段】本発明の進路矯正型走行車1は、本体部2と、本体部2にそれぞれ取り付けられた一対の前車輪3a,3bおよび一対の後車輪4a,4bとを有し、前車輪3a,3bは進路方向に沿って、かつ水平方向に対して斜め方向に延在するよう本体部2に取り付けられた第一回動軸5を中心として舵取り可能に回動し、他方、後車輪4a,4bは進路方向に沿って、かつ水平方向に対して平行に延在するよう本体部2に取り付けられた第二回動軸6を中心として舵取り不能に回動するものである。
(もっと読む)
作業車の前輪増速駆動装置
【課題】前輪増速装置を装備した作業車において、旋回時に作業機上昇と前輪増速が同時に作動してしまい、圃場端の耕耘の終了部が斜めになることがあった。
【解決手段】ステアリングハンドル57の回動角を検知する手段と、作業機昇降制御手段と、前輪増速切換手段と、これらの制御手段を備え、ステアリングハンドル57を直進位置から設定角度以上切ると、作業機を上昇させ、前輪を増速駆動するようにした作業車において、前記作業機の上昇動作と前輪を増速駆動する動作との間に所定の時間差を設けた。
(もっと読む)
コンバイン
【課題】回転式の操向操作具に設けた進路変更手段によって進路変更操作を容易・確実にすると共に、スピン旋回を入り切りさせて誤操作を防止できるものとする。
【解決手段】旋回用の油圧式無段変速装置(40)の回転出力を、中央にモニターを備えた操向操作具(16)の操作によって調節できるように構成する。そして、操向操作具(16)を左右いずれかに回転操作すると回転操作方向側のホイル軸(30)を減速させて旋回し、操向操作具(16)とは別の操作具の操作によってスピン旋回を入りにした状態で操向操作具(16)を更に回転操作すると左右のホイル軸(30,30)を互いに逆回転させてスピン旋回すると共に表示部(22)に操向操作具(16)の回転操作状態を表示するように構成する。更に、操向操作具(16)の回転操作によらずに機体を左右に方向修正することのできる進路変更手段(17)を設ける。
(もっと読む)
作業車の走行制御装置
【課題】 直進走行及び旋回走行を良好に行うことができ、しかも、直進走行時において一時的に大きな走行駆動力が必要となる場合に良好な直進走行を行うことが可能となる作業車の走行制御装置を提供する。
【解決手段】 直進が指令されると直進用の無段変速装置7の出力を左右一対の走行装置1R,1Lの夫々に伝達し、右旋回が指令されると直進用の無段変速装置7の出力を左側の走行装置1Lに伝達し且つ旋回用の無段変速装置8の出力を右側の走行装置1Rに伝達し、左旋回が指令されると直進用の無段変速装置7の出力を右側の走行装置1Rに伝達し且つ旋回用の無段変速装置8の出力を左側の走行装置1Lに伝達し、走行駆動力の増大が指令されると、直進用の無段変速装置7の出力及び旋回用の無段変速装置8の出力を左右一対の走行装置1R,1Lの夫々に伝達して、旋回用の無段変速装置8を直進用の無段変速装置7と同じ又は略同じ速度になるように制御する。
(もっと読む)
トラクタ作業機のローリング制御装置
【課題】圃場の畦際等でのトラクタ作業で操向旋回時における不安定なローリング制御状態を回避しようとする。
【解決手段】 トラクタ車体(1)に作業機(2)を装着し、車体(1)の左右傾斜角を検出する傾斜センサ(3)と、車速を検出する車速センサ(4)と、車体(1)の操向角を検出する操向センサ(5)等を有し、各センサ(3)、(4)、(5)の検出に基づいて、車体(1)に対して作業機(2)の連結姿勢を水平制御や、平行制御を行わせると共に、操向センサ(5)が一定以上の切り角を検出すると該水平制御を停止して平行制御を行わせ、この操向センサ(5)が一定以下の切り角を検出して一定時間経過すると該水平制御に復帰させる。
(もっと読む)
乗用型田植機のサイドクラッチ切換機構
【課題】左旋回時と右旋回時において、操向手段の操作に対し旋回方向内側のサイドクラッチが略同じ時期に入切動作を行うようにして、旋回性能の向上を図る。
【解決手段】操向手段と左右のサイドクラッチ45・45とをリンク機構及びカム機構にて連動連結し、該カム機構に操向手段の操作に連動して回動するカム部材71と、該カム部材71とローラ74を介して作用する左右の操作アーム75・75と、該操作アーム75・75を介して左右のサイドクラッチに作用するクラッチ操作部材72・72とを備え、該リンク機構に操向手段とカム部材71とを連結し、操向手段により押し引きされてカム部材71を回動させるロッド65を備えた乗用型田植機のサイドクラッチ切換機構において、前記カム部材71を回動中心に対して左右非対称な形状に構成した。
(もっと読む)
水田作業機
【課題】 4輪走行する走行機体の後部に水田作業装置を連結した水田作業機を、小回り旋回できるようにする。
【解決手段】 前輪1を最大に操向した状態における旋回外側の前輪1の旋回半径R1が旋回外側の後輪2の旋回半径R2以下となるように、前輪トレッドW1、後輪トレッドW2、および、前後輪間のホイルベースLを設定してある。
(もっと読む)
乗用型作業車
【課題】 パワーステアリングユニットの取付けに工夫を凝らすことによって、ミッションケース上面回りの機器配置の煩雑さを緩和する。
【解決手段】 ミッションケース16に下側ハンドルポスト33を立設し、ハンドルポスト33にパワーステアリングユニット34を取り付ける。パワーステアリングユニット34をミッションケース16の上方でかつ離間させて設けるとともに、パワーステアリングユニット34の下端位置を、エンジン10の上端と同一高さ位置か又はエンジン10の上端より上方位置に設定してある。
(もっと読む)
コンバイン
【課題】収穫作業時においては手動スイッチによって未刈り穀稈列に沿わせる条合せ操作を適正に行わせ、且つ、収穫作業時以外における手動スイッチへの誤操作によってコンバインが旋回することを防ぎ、運転操作性並びに取扱い性などの向上を図る。
【解決手段】操向ハンドルの旋回操作に応じて左右の走行クローラの回転数に差を生じさせると共に、手動スイッチの操作によっても前記左右の走行クローラの回転数に差を生じさせて左右の緩旋回が行われるように構成されたコンバインにおいて、刈取部が駆動状態にあるか否かを検出する刈取センサの検出結果に基づき、前記刈取部が非駆動状態の際には、前記手動スイッチの操作を無効とする。
(もっと読む)
三輪管理機
【課題】 本発明は、転舵時における運転者の負担が小さく、且つコストが嵩まない三輪管理機を提供することを課題とする。
【解決手段】 エンジン21で左右に備える2個の後輪18L、18Rを流体変速機22L、22Rを用いて駆動すると共に発電機52を回し、この発電機52で発電した電気を電動モータ14に供給し、この電動モータ14を用いて操舵輪である1個の前輪13を駆動する三輪管理機10において、この三輪管理機10は、前輪13の転舵角が大きくなるほど、外側後輪18R(又は18L)の回転速度に対して内側後輪18L(又は18R)の回転速度を減少させるごとくに、前輪13の転舵角に基づいて内側後輪18L(又は18R)及び前輪13の回転速度を制御する制御部51を備える。
(もっと読む)
乗用型農作業機
【課題】 乗用型農作業機において、運転者が走行機体の前方の地上に立ちながら行う走行機体の操作の操作性を向上させる。
【解決手段】 走行機体の前部に操向操作具を備え、操向操作具により走行機体の前方の地上から前輪の操向操作が可能な第1状態と、操向操作具により走行機体の前方の地上から前輪の操向操作が不能な第2状態とを設定する。操向操作具を前方に倒伏操作可能に構成し、操向操作具の倒伏角度によって第1及び第2状態が選択されるように構成する。
(もっと読む)
コンバイン
【課題】旋回用油圧式無段変速機構の出力を可変操作する操向ハンドル、走行用油圧式無段変速機構の出力を可変操作する変速レバー及び刈取条合わせ操作を行う手動スイッチの3つの操作部材の操作性を向上させる。
【解決手段】変速レバーは前記操向ハンドルより左側に配置し、前記手動スイッチは前記操向ハンドルを握った右手の指で操作可能なように該操向ハンドルの右内膨らみ部に設ける。好ましくは、前記手動スイッチを単一とし、該単一の手動スイッチによって左右の緩旋回操作が行われるように構成し得る。より好ましくは、前記手動スイッチを4方向スイッチとし、左右に操作することで左右の緩旋回が行われ、上下に操作することで刈取高さが変更されるように構成し得る。
(もっと読む)
121 - 140 / 174
[ Back to top ]