
Fターム[2F051AB03]の内容
特定の目的に適した力の測定 (5,882) | 力の検出手段 (2,017) | 光学的 (227)
Fターム[2F051AB03]に分類される特許
1 - 20 / 227
外力検知装置、ロボット制御システム及び外力検知方法
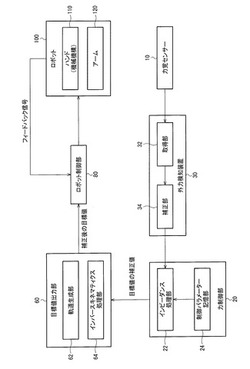
【課題】 力覚センサーの先に設けられた機械機構により外力が変調される場合に、精度の高い外力検知を行う外力検知装置、ロボット制御システム及び外力検知方法等を提供すること。
【解決手段】 外力検知装置30は、力覚センサー10から出力されたセンサー情報を取得する取得部32と、取得したセンサー情報に対して補正処理を行う補正部34とを含み、力覚センサー10には、外力fを変換して力Fとして力覚センサー10に伝達する機械機構(ハンド110等)が設けられ、補正部34は機械機構での変換の逆変換を補正処理として行う。
(もっと読む)
柔軟触覚センサ

【課題】柔軟触覚センサにおいて、光透過性弾性部材の変形が当該センサの他の構成要素に与える影響を低減する。
【解決手段】基板1上に固定した発光素子2及び受光素子3と、発光素子2及び受光素子3を覆うように設けられた光透過性弾性部材からなる触覚部4と、を備え、発光素子2と受光素子3は、前記光透過性弾性部材の部分を介して離間対向しており、発光素子2から出射された光は、前記発光素子と前記受光素子との間の光透過性弾性部材の部分を透過して受光素子3で受光され、触覚部4に外力が加えられた時の前記光透過性弾性部材の部分の密度変化に伴う受光素子3で受光される光量の変化を取得する。
(もっと読む)
計測装置、モータ装置、及びロボット装置
【課題】出力されるトルクを計測する。
【解決手段】計測装置は、回転子SFの周面の少なくとも一部に掛けられる伝達部BTを用いて駆動動作及び復帰動作を行う駆動部30によって駆動される回転子SFに加えられるトルクを計測する計測部、を備える。
(もっと読む)
6軸力計測装置、及び6軸力計測方法
【課題】製作や小型化が容易であり、物体との接触面に柔軟性を持ち、更に柔軟素材が持つ複雑な応力歪み特性に依存せずに6軸力の計を測可能とする6軸力計測装置及びそのシステムを提供する。また、他の光学式触覚センサへ応用し、光学式触覚センサ自体の機能を失わずに同時に6軸力の計測が可能になるような、力学量計測装置及びそのシステムを提供する。
【解決手段】6軸力計測装置1は、タッチパッド3の他に、形状抽出手段としてのCCDカメラ4及び照明5と、圧力抽出手段としての圧力センサ10あるいは圧縮性流体19及び箱20を備える。CPU15は、CCDカメラ4によって撮影された画像から膜6の形状及び膜6の端に作用する張力の方向を抽出し、膜6の形状から物体W1が膜6に接触していない非接触領域を抽出する。さらに、CPU15は圧力センサ10からのアナログ信号を入力し、液体11の圧力を抽出する。最後にCPU15は、これらの情報から板7に作用する(任意の軸方向の力及びモーメント)6軸力を抽出する。
(もっと読む)
柔物体のためのセンサモジュール及びセンサシステム
【課題】柔物体本来の柔らかさや安全性を損なうことなく簡単に実装することができ、且つ、柔物体に対し加えられた荷重、変形を測定可能なセンサモジュールを提供する。
【解決手段】柔物体の内部に充填されている充填物の中に、センサモジュールを挿入する。このセンサモジュールは、センサモジュールの周囲の充填物で反射される光を検知するように、互いに異なる向きに配置されている複数のフォトリフレクタを有している。そして、複数のフォトリフレクタの出力に基づいて、柔物体に対し加えられた荷重又は変形による充填物の密度の変化を測定する。例えば、クッション60の四隅に4個のセンサモジュール62を挿入する。情報処理装置63は、センサモジュール62から取得した測定結果(ユーザがクッションを押した箇所)に応じて、TV61に対し制御命令を送出する。
(もっと読む)
光学的圧力測定
【課題】ハウジングからなる感知装置を提供する。
【解決手段】前記ハウジングが媒体を含み、前記媒体が、生きた身体内の組織と接触し、身体組織によって表面上に付与される力に応答して変形するように構成されている弾性の透明外側表面を有する。装置は、ハウジング内に収容され、放射線を表面に向かって指向させるように構成されている放射線源と、ハウジング内に収容され、表面から反射される放射線を感知し、そして反射放射線の振幅を示す信号を出力するように構成されている放射線検出器と、を有する。装置は更に、表面の変形に起因する信号における変化を測定し、この変化に応答して力の指示を出力するように結合されているプロセッサを有する。
(もっと読む)
高炉装入物の落下軌跡測定方法および測定棒
【課題】高炉炉頂の粉塵が多い環境でも、高炉装入物の落下軌跡を精度よく測定できる方法を提供すること。又、メンテナンスに難が少なく、簡便で短時間に測定が可能な高炉装入物の落下軌跡測定方法を提供すること。
【解決手段】 高炉内に装入物を装入するときの装入物落下軌跡を測定する高炉装入物の落下軌跡測定方法であって、高炉の装入物装入装置と炉内の装入物表面の間に、圧力測定フィルム2を巻きつけた測定棒1を挿入する工程と、前記測定棒に装入物3を落下させて、前記圧力測定フィルム2に圧痕を発色させる工程と、測定した前記圧力測定フィルム上に記録された圧痕から、該圧痕の個数と個々の圧痕の圧力を求める工程、を有する高炉装入物の落下軌跡測定方法。
(もっと読む)
物体の変位推定方法並びにパンタグラフの接触力推定方法及び装置
【課題】 被測定物や測定装置の測定していない点の変位を推定することで、推定量の誤差を少なくできる物体の変位推定方法を提供する。
【解決手段】 n個の部材rがピンlを回転支点としてX軸方向に連結している物体において、各部材rにマーカー10を貼り付け、X軸方向位置xにおける各マーカー10のY軸方向(X軸に交差する方向)の変位yを一次元センサで計測する。そして、各部材rの両端のピンl通る直線を一次式で表わすとともに、各ピンlの座標を求め、さらに、n−1本目の直線とn本目の直線が交差する条件を表わす。これらの式から、部材rごとの、その両端のピンlを通る直線式を求める。この式から、部材r内の任意の点の変位や、各部材rの傾きを正確に求めることができる。
(もっと読む)
土砂災害感知システム
【課題】 水路ブロックの設置地盤の異常状態を知ることによって、土砂災害(法面の異常)を早期に感知することのできる土砂災害感知システムを提供する。
【解決手段】 土砂災害感知システム10は、法面5から生じる雨水を排水するための、各々が連結した複数の水路ブロック11と、水路ブロック11の側壁に連続的に取付けられた光ファイバー30と、光ファイバー30の一方端部に設置された光ファイバー試験機35とから主に構成されている。そして、水路ブロック11の設置地盤が崩壊すると、水路ブロック11間のずれによって光ファイバー30が破断し、その破断場所が光ファイバー試験機35によって検知される。即ち、水路ブロック11の設置地盤の異常開始状態を感知することができるため、土砂災害を早期に感知することができる。
(もっと読む)
電動ブレーキ装置
【課題】摩擦パッドの押圧力を検出するためのセンサが、摩擦パッドとブレーキディスクの間の摩擦熱の影響を受けにくい電動ブレーキ装置を提供する。
【解決手段】回転軸11の外径面に転がり接触する複数の遊星ローラ12と、軸方向移動を規制されたキャリヤ14と、軸方向に移動可能な外輪部材13と、外輪部材13の軸方向前端に配置された摩擦パッド8とを有し、回転軸11の回転を外輪部材13の軸方向移動に変換し、その外輪部材13で摩擦パッド8を押圧する電動ブレーキ装置1において、外輪部材13で摩擦パッド8を押圧したときに外輪部材13に作用する軸方向後方への反力を受け止める反力受け部材15を外輪部材13の軸方向後方に設け、その反力受け部材15の変位を測定する変位センサ38を設ける。
(もっと読む)
径方向膨張力の測定装置および径方向膨張力の測定方法
【課題】ステントや他の製品の径方向の膨張力またはフープ力を測定するための装置を提供する。
【解決手段】(a)少なくとも1つの静止要素47と、これに対して移動しうる少なくとも1つの回転要素50と、それぞれが、径方向外側及び内側の端部、並びに径方向外側及び内側の連結部を有する複数のセグメントとを備える製品係合機構20であって、セグメントの径方向内側の連結部は静止要素に回動可能に連結され、セグメントの径方向外側の連結部は回転要素に回動可能に連結されており、径方向内側の端部は、この製品係合機構の中央の開口の境界に隣接し、かつ回転要素が所定の方向に回転したときに、開口に配置される製品と係合するようになっている製品係合機構と、(b)回転要素を回転させうる駆動機構22と、(c)駆動機構と電気的に接続し、回転要素を回転させるのに要する力を測定する力変換機構とを具備する。
(もっと読む)
力覚センサ
【課題】多数のセンサを必要とすることなく、センサのための配線簡単化も容易である力覚センサを実現する。
【解決手段】第1の本体部A1および第2の本体部A2と中間体Bとの間に弾性連結部9a〜9c、10a〜10cを設ける。これにより、本体部A1、A2を中間体Bを介して相対移動可能に連結し、第2の本体部A2に作用する外力の6方向の成分を、センサ基板13に搭載された検出電極14a〜14c、15a〜15cによって検出する。本体部A2に支持されたセンサ基板13のみに検出電極が設けられるため、中間体Bや本体部A1にまたがって複雑な配線を施す必要がない。
(もっと読む)
力覚センサ
【課題】小型化及び低コスト化を図る。
【解決手段】第1の固定部A1のセンサ支持体5に受光素子を有するセンサ基板11が設けられている。第2の固定部A2は、外力の作用によりセンサ支持体5に対して変位する。第2の固定部A2の円筒部材6と、センサ支持体5とが弾性連結部7a,7b,7cで連結されている。第2の固定部A2の変換部材取付板3とセンサ支持体5との間には、変位方向変換部材10a,10b,10cが配置されている。各変位方向変換部材10a,10b,10cは、センサ支持体5に対する第2の固定部A2の垂直方向の変位によってセンサ支持体5に対して水平方向に変位する中間端部23を有している。そして、センサ基板11の各受光素子に対向するように、中間端部23の下面にスケール34a,34b,…が設けられている。
(もっと読む)
衝撃荷重測定システム、衝撃荷重測定方法、コンピュータプログラム、及びコンピュータ読み取り可能な記録媒体
【課題】高速度カメラにより撮像した画像から前記荷重測定装置の加速度データを算出することにより、衝撃荷重を正確に測定することができる衝撃荷重測定システム、衝撃荷重測定方法、コンピュータプログラム、及びコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】 衝突体が試験体に衝突した際の衝撃荷重を測定するシステムであって、前記衝突体に設置される荷重測定装置と、該衝突体の挙動を撮影する高速度カメラと、該高速度カメラにより撮像した画像から前記荷重測定装置の加速度データを算出する加速度評価装置と、前記荷重測定装置により測定された荷重データを抽出する荷重評価装置と、前記加速度データに基づいて前記荷重データを補正する補正装置と、を有することを特徴とする、衝撃荷重測定システム、衝撃荷重測定方法、コンピュータプログラム、及びコンピュータ読み取り可能な記録媒体。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外圧の方向と大きさを高い精度で検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する弾性体突起22、が形成された第2基板20と、を備える。
(もっと読む)
内輪へのひずみセンサ内蔵型転がり軸受の荷重分布測定方法及びその装置
【課題】簡単な構成の測定装置で転がり軸受の荷重分布を精確に求めることができる、内輪へのひずみセンサ内蔵型転がり軸受の荷重分布測定方法及びその装置を提供する。
【解決手段】外輪が固定され内輪が回転する転がり軸受の回転軸に固定される前記内輪2の軌道面近傍に円周方向に細穴2Aを設け、この細穴2A内にひずみセンサ部4を装備する光ファイバ3を挿入し、かつ前記内輪2のひずみセンサ部が配置される位置の中心側に形成される切欠溝2Bを形成し、前記内輪2とこの内輪2の外方に配置される前記外輪との間に転動体5を備え、前記ひずみセンサ部4からの出力信号を光ファイバ3で導出し、前記回転軸の軸方向に配置され、前記回転軸に固定される支持体に支持される単一のロータリージョイントを介してひずみ計測器に光ファイバを接続し、前記転がり軸受を回転させて前記ひずみセンサ部4の位置を前記転動体5が通過する際のひずみを検出する。
(もっと読む)
変形状態測定装置
【課題】被測定物全体が加圧された状況下での変形状態を形状データと分布圧力データとして瞬時に測定する装置を提供する。
【解決手段】ベース40と、前記ベース40の上部に取り付けられた面圧シート10と、前記面圧シート10の上部に複数取り付けられたプローブピン20と、複数の前記プローブピン20を各々覆うように取り付けられた複数のガイド筒30から構成されており、前記プローブピン20は下側ピン22と前記下側ピン22を覆うように配置されたプローブカップ24と前記下側ピン22とプローブカップ24の間に挟まるように配置された弾性体とから構成されており、前記面圧シート10と前記下側ピンと22が接触している。
(もっと読む)
メッキ膜の応力測定方法
【課題】メッキ膜の応力を簡単なシステムによって高い精度で測定することができる方法を提供する。
【解決手段】基端が固定された長尺な箔状の金属よりなる試験用基体を有する試験片を用い、前記試験用基体の一面にメッキ膜を形成した後、この試験用基体の先端位置について、前記メッキ膜が形成される前の試験用基体の一面に垂直な方向における基準位置からの変位量を測定し、測定された変位量に基づいて前記メッキ膜の応力を算出するメッキ膜の応力測定方法であって、前記試験用基体の先端の変位量は、レーザ変位計またはカメラ撮影像による像解析によって測定されることを特徴とする。
(もっと読む)
ねじれ秤による微小力測定装置及び微小力測定方法並びに埋没物体の探査方法
【課題】ねじれ秤のアームを吊るす細線に対するアームの重心の振り子運動としての単振動の影響を受けずにねじれ秤の回転角度を決定することが可能である。
【解決手段】アーム12の中心軸を回転中心とする回転角度を計測することで測定する構成とされたねじれ秤によって微小力を測定する装置である。画像情報取得装置20は、アームの画像を取り込んでこの画像の画像情報信号25を生成しこの画像情報信号を時系列に従ったアームの静止2次元光強度画像を表示するビデオフレーム27を生成して出力する。画像情報処理装置30はアームの静止2次元光強度画像から、光強度重心となる複数の輝度重心座標点を決定し、この複数の輝度重心座標点からの距離の二乗の和が最小となる直線の方程式を最小二乗法によって求め、この直線の傾きを表すパラメータから物体10に働く力の大きさを決定する。
(もっと読む)
光ファイバセンサ
【課題】反射波長のシフト量の差を緩和することにより、該シフト量に対する補正処理を行うことなく、垂直応力を検出(算出)する。
【解決手段】FBGセンサ40において、応力方向変換部22x、22yは、同一の平坦部20を共有し、応力方向変換部22xは、平坦部20を基点として、該平坦部20に直交する+Z方向に指向して設けられると共に、応力方向変換部22yは、平坦部20を基点として、−Z方向に指向して設けられている。
(もっと読む)
1 - 20 / 227
[ Back to top ]