
Fターム[2F062EE47]の内容
機械的手段の使用による測定装置 (14,257) | 測定方法 (2,962) | 複数の検出値を組み合わせるもの (113) | 位置検出による寸法測定 (78)
Fターム[2F062EE47]に分類される特許
1 - 20 / 78
接触式プローブおよび形状測定装置
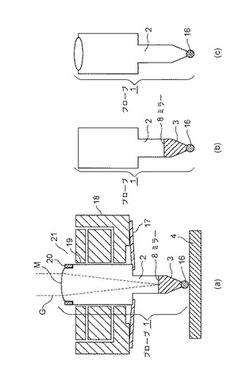
【課題】 プローブの伸び、及び周辺空気の温度、湿度の影響を抑えた高精度な形状測定を行うことのできる形状測定用の接触式プローブおよび形状測定装置を提供する。
【解決手段】 プローブシャフト2と先端球16を備えた接触式プローブ1において、
前記プローブシャフト2内の測長光路の少なくとも一部に透明体を設けることにより、少なくともこの部分だけ空気に暴露された光路を減らすことができる。その結果、外気の屈折率変化による測定誤差を抑え、精度を向上させることができる。
(もっと読む)
計測装置

【課題】装置の高コスト化を抑えながら、被検面の形状を高精度に計測することができる技術を提供する。
【解決手段】被検物を保持する保持面を含む保持部と、被検面と被検面の形状を計測するための基準となる基準位置との間の距離を計測する距離計測部と、基準位置が被検面に沿うように距離計測部を駆動する駆動部と、駆動部によって駆動される距離計測部の基準位置を測定する位置測定部と、距離計測部によって計測された被検面と基準位置との間の距離と位置測定部によって測定された基準位置とに基づいて被検面の形状を算出する処理部と、を有し、位置測定部は、距離計測部に配置されて互いに異なる測定軸を有するレーザ干渉計と、レーザ干渉計のそれぞれからの光をそれぞれ反射する基準ミラーとを含み、レーザ干渉計の原点と基準ミラーとの間の距離を測定することで基準位置を測定し、基準ミラーの法線が保持面を含む面に交差するように配置される。
(もっと読む)
真円度測定装置及びその心ずれ量補正方法
【課題】測定物の母線と検出点とのずれ量である心ずれ量を算出して補正することにより、基準となる測定物の直径値とは異なる直径値を有する測定物であっても正確な直径値を算出する。
【解決手段】測定物の中心と回転の中心を一致させて、測定物を検出器に対して相対的に回転させ、測定物の真円度を測定する真円度測定装置において、直径値既知の基準測定物と前記検出器を前記基準測定物の母線と平行に相対的に移動して前記基準測定物の対向する2つの検出点でそれぞれ測定を行い、その測定差を検出する手段と、前記測定差に基づいて、前記基準測定物の母線と前記検出点とのずれ量である心ずれ量を算出する手段と、前記算出した心ずれ量に基づいて、任意の測定物の測定値を補正する手段と、を備えたことを特徴とする真円度測定装置を提供する。
(もっと読む)
形状測定方法
【課題】周期的な複数の設計段差を有する設計形状に基づいて形成された被測定面の測定データと設計形状とのフィッティングを高精度に行う。
【解決手段】被測定面の測定点列から段差領域と段差の高さとを特定する(S3)。そして、点列に対する段差高さの移動を行う(S4)。即ち、段差をなくすような処理を行い、段差のないフィッティング対象データを得る(S5)。一方、設計形状から複数の設計段差のない参照形状を取得する(S6、7)。そして、フィッティング対象データと参照形状とを、例えば最小二乗法などによりフィッティングする(S8)。フィッティング対象データと参照形状とから段差形状成分を除去しているため、フィッティングを高精度に行える。
(もっと読む)
3次元表面形状算出装置およびそれを用いた自動施工装置ならびにその方法
【課題】1回の走査で精度よく測定対象表面の3次元表面形状を算出することができる3次元表面形状算出装置を提供する。
【解決手段】3次元表面形状算出装置1は、センサ基台6と、先端に球形状を1方向に移動できる変位センサ2と、原点を定めた3次元空間で平面方程式算出点22を囲む3点の接触点に変位センサ2を接触させてセンサ基台6を移動させる演算部8とを備え、演算部8は、センサ球2の移動距離である変位信号200およびセンサ基台6の原点からの方向ならびに距離を用いて3点の球中心座標を求め、1点の球中心座標から他の2点の球中心座標へ向かう2つのベクトルの外積である法線ベクトルの単位ベクトルに球形状の半径を乗したベクトルを求め、このベクトルを球中心座標に加えて接触点の座標を求め、この接触点の座標が囲む平面方程式を算出する。
(もっと読む)
表示装置を用いた運転者頭部位置検出方法
【課題】自動車等の車両には、運転者が快適且つ安全に運転を行うための車内設備が備えられているが、これらの車内設備は運転者の身長又は体型によって最適な設定が異なるため、運転中の運転者が最適な設定を得るために車内設備を操作すると安全運転の妨げになるといった問題が生じる。
【解決手段】車両内に備えられた複数の点のうち、基準点を移動させて前記複数の点を重ね合わせることで運転者の頭部の位置を検出する頭部位置検出方法において、前記頭部位置検出方法はナビゲーション又はエアコン、オーディオ、車両状態等の少なくとも1つの情報の表示を行うディスプレイを有した表示装置を用いて行われ、前記表示装置によって検出された前記運転者の頭部の位置に基づいて車内設備の設定変更を行う。
(もっと読む)
無重力下形状を推定するための方法及び装置
【課題】薄いガラスシートのような可撓性物体(140)に無重力下形状を推定するための方法及び装置(100,200)を提供する。
【解決手段】いくつかの実施形態において、ベッドオブネイル(BON)ゲージ(100)を用いて推定無重力下形状が生成され、次いで第2のゲージ(200)を用いてさらに高い空間分解能で形状が測定されて、BONゲージのピン(110)の間の理論サグが第2のゲージで測定された形状から差し引かれる。別の実施形態において、物体(140)の両面で形状測定が実施され、推定無重力下形状の信頼度を評定するために用いられる。別の実施形態において、ベッドオブネイルゲージ(100)はピン(110)の高さ調節に最小二乗法最小化手順を用いる。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
形状測定装置
【課題】測定子の位置を適切に制御することができ、測定子が非接触か否かを適切に判断することができる形状測定装置の提供。
【解決手段】三次元測定機1は、測定子を有するプローブ21と、プローブ21を移動させる移動機構22と、ホストコンピュータ5とを備える。ホストコンピュータ5は、測定子の移動量を取得する移動量取得部52と、測定子を非接触とした状態における基準位置からの測定子の移動量を偏差として取得する偏差取得部54と、偏差取得部54にて取得される偏差が第1の閾値より大きいか否かを判定する判定部55と、判定部55にて偏差が第1の閾値より大きいと判定されると、基準位置と、偏差とを合成した位置に基準位置を更新する更新部56とを備える。
(もっと読む)
機上計測装置のプローブ取り付け位置算出方法
【課題】回転軸を用いた機上計測において、各種演算により算出された機上計測装置の取り付けられた回転軸の回転中心軸とプローブの先端との距離を基準球計測の結果を基に補正を行う機上計測装置のプローブ取り付け位置算出方法を提供する。
【解決手段】基準球を計測することにより、算出したプローブ取り付け位置(X0,Z0)の精度を向上させる準備段階において、(X0,Z0)のX,Z値を各々―1nmずつずらし、ずらした座標を基に基準球計測プログラムを作成して一定角θ1,θ2での座標を求め所定の条件内であるか否か判断し、条件を満たす場合には、(X0,Z0)に総ずらし量を加えたものを真のプローブ取り付け位置とし、処理を終了し、条件を満たさない場合には、ずらす度に一定角θ1,θ2での座標から離れるか否か判断し、離れない場合には準備段階の最初へ移行し、離れる場合には異なる方向へずらす第2の準備段階へ移行する。
(もっと読む)
UO鋼管溶接部ビード位置検出装置
【課題】UO鋼管の溶接部ビード位置を、安価で、精度よく検出することが可能なUO鋼管溶接部ビード位置検出装置を提供する。
【解決手段】UO鋼管1の軸線直下に配置されたタッチローラ6を当該UO鋼管1の外周面に当接した状態で、ターニングロール3によってUO鋼管1を周方向に回転させると、UO鋼管1の溶接部ビード2がタッチローラ6を乗り越える前後で2個1対のレーザ式変位計9の出力が変動するため、それらのレーザ式変位計9の出力変動から溶接部ビード2の入側と出側の位置を求め、その中間を溶接部ビード2の位置として算出することができる。また、2個1対のレーザ式変位計9の出力の微分値の絶対値が所定値以上になる位置を溶接部ビード2の入側又は出側の位置とすることで、検出精度を向上することができる。
(もっと読む)
傾斜計を用いて関節アーム座標測定機の取り付けの安定性を評価するための方法
可搬型の関節アーム座標測定機が、基部と、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含む、アーム部と、トランスデューサからの位置信号を受信する電子回路と、基部に結合された第1の傾斜計であって、基部の傾斜の角度に応じた第1の電気信号を生成するように構成された、第1の傾斜計と、第1の傾斜計の第1の読み取り値および第1の傾斜計の第2の読み取り値を記録するように構成された電気的システムであって、第1の読み取り値が、基部に加えられた第1の力および取り付け構造に加えられた第3の力のうちの少なくとも1つに応じたものであり、第2の読み取り値が、基部に加えられた第2の力および取り付け構造に加えられた第4の力のうちの少なくとも1つに応じたものである、電気的システムとを含む。 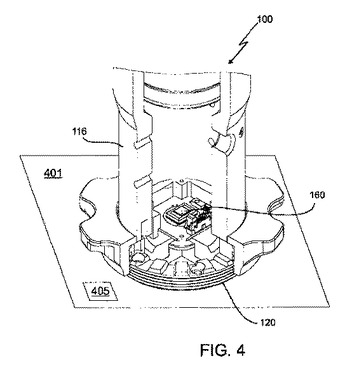 (もっと読む)
(もっと読む)
座標測定機用取付けデバイス
可搬型の関節アーム座標測定機用取付けデバイスが、提供される。取付けデバイスは、開口が中を貫いている本体を含む。へりが、開口の片側に配置され、へりは、座標測定機の基部部分のフランジに係合するように大きさが決められる。開口の一部は、外部の取付け具に結合するように構成されたねじ山を含む。第1のアームが、本体に結合され、第1の位置と第2の位置の間を第1の方向に回転するように構成される。 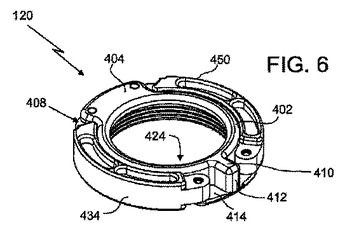 (もっと読む)
(もっと読む)
可搬型の関節アーム座標測定機および統合された電子データ処理システム
可搬型の関節アーム座標測定機の実装が、機能を実行する第1の要求を受信するステップを含む。可搬型のAACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが位置信号を生成するための少なくとも1つの位置トランスデューサを含む、関節アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型の関節アーム座標測定機の実装は、第1の要求が受信される送信元デバイスを特定するステップと、第1の要求に従って機能を実施するステップと、第1のポートおよび第2のポートのうちのどちらから第1の要求が受信されるかを特定することによって、送信先デバイスを第1の要求の送信元デバイスとして選択するステップと、機能を実施することにより得られた情報を送信先デバイスに送信するステップとをさらに含む。 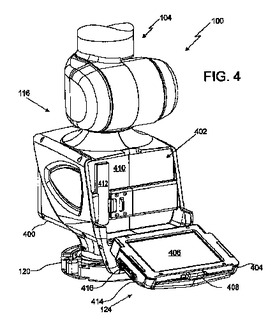 (もっと読む)
(もっと読む)
座標測定デバイス
可搬型の座標測定デバイスが、提供される。座標測定デバイスは、少なくとも1つのアームを含む。一端に磁気部材を含むブラケットが、アームに結合される。プローブが、アームの一端に回転可能なように結合され、プローブは、第1の側面に第1の鉄部材を含み、プローブは、第1の位置と第2の位置の間を動くことができ、鉄部材は、第2の位置にあるときに磁石に近接する。 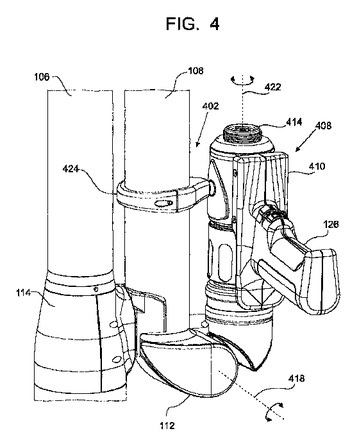 (もっと読む)
(もっと読む)
重心測定システムおよび重心測定方法
【課題】被測定物の重心位置を正確に把握することができる重心測定システムおよび重心測定方法を提供する。
【解決手段】被測定物を載置する載置台、プローブ12およびこれらを三次元方向へ相対移動させる相対移動機構13を有し、被測定物の形状を測定する三次元測定機10と、載置台の重心位置を測定する重心測定装置20と、三次元測定機の座標系と重心測定装置の座標系とを一致させるとともに、三次元測定機によって測定された被測定物の形状データに、重心測定装置で測定された重心位置を合成するデータ処理装置30とを備える。
(もっと読む)
取り付け式スケールバー
スケールバー加工品は、ベースと、構造部材と、構造部材に配置されて、中心を持つ球形物体を収容するように構成される少なくとも2つのネストと、それぞれが第1部位及び第2部位を含む少なくとも3つの取り付けアセンブリとを含むことができる。各取り付けアセンブリの第2部位は、ベースに連結される。各取り付けアセンブリの第1部位は、構造部材に連結される。各取り付けアセンブリの第1部位と第2部位は、互いに接している。各取り付けアセンブリは、回転中心を有する。3つの取り付けアセンブリの回転中心は、球形物体の中心と共通の平面を共有する。 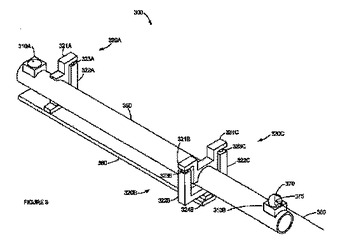 (もっと読む)
(もっと読む)
三次元形状測定方法
【課題】被測定物の三次元形状の測定精度をより一層向上させることができる三次元測定方法を提供する。
【解決手段】被測定物の表面に沿ってプローブを走査して、XY座標データを取得するとともに、光干渉計によりXY座標データに対応するA相正弦波信号値とB相正弦波信号値とを取得し、それらの信号値の位相差と2乗和平方根とを算出し、位相差に基づいてZ座標データを取得するとともに、2乗和平方根によりプローブのZ軸方向に対する傾き角度を求め、当該傾き角度からプローブと被測定物との接点の位置ズレ量を算出し、XY座標データとZ座標データと位置ズレ量とを合成して、X軸、Y軸、及びZ軸における各座標データを取得し、被測定物の三次元形状を測定する。
(もっと読む)
間隙の検査方法および治具
【課題】物体の間隙が公差内か否かを簡単にかつ即座に判断する。
【解決手段】物体の間隙の公差の上限値の長さを外径とする第1のロール4と、前記間隙の公差の下限値の長さを外径とする第2のロール5を、各端面が平行となるよう直線的に配置する。少なくとも第1のロール4を軸と直交する方向に移動可能に構成する。両ロール4,5の軸と直交する方向の相対距離を表示する指針9および目盛り板10を設ける。第1のロール4と第2のロール5を、両ロール4,5の軸方向が、鋼矢板の継ぎ手Aの開口aのスリット方向と平行になるようにして、前記開口aに挿入させた際の両ロール4,5の軸と直交する方向の相対距離Lをもとに前記検査の判断を行う。
【効果】物体の間隙が公差内かどうかを、作業者が簡単にかつ即座に判断でき、検査作業の効率アップが図れる。また、抜取り検査の場合、所定時間内に多数の箇所が検査可能となって、品質管理上も有用である。
(もっと読む)
輪郭形状測定機
【課題】測定から解析を含めた一連の動作の自動化を可能とした輪郭形状測定機を提供する。
【解決手段】測定マクロの実行と解析マクロの実行の間に、過去の測定によって取得した形状データと、新しく測定した形状データとを比較してその偏差を算出し、解析マクロ実行時にこの偏差の修正を行うベストフィット処理をする手段を設け、新しく測定した形状データを解析する解析マクロの基準点を過去の測定に使用した基準点と一致させるようにした。
(もっと読む)
1 - 20 / 78
[ Back to top ]