
Fターム[2F062FF05]の内容
機械的手段の使用による測定装置 (14,257) | 走査 (1,305) | 走査方向 (1,174) | 検出部が移動するもの (846) | 三次元 (208)
Fターム[2F062FF05]に分類される特許
141 - 160 / 208
形状測定方法及び装置

【課題】被測定物の表面から受けた抗力の方向に変位しないタイプの測定プローブを用いた場合でも、目標点の3次元座標の正確な測定を可能にする。
【解決手段】測定ヘッド29に対して3次元変位可能に測定球33を支持しており3次元座標系における測定ヘッド29に対する測定球33の変位量を検出可能になっている測定プローブ15を用い、測定プローブ15を目標点に向けてアプローチさせ、測定球33を測定ヘッド29に対して変位させた後、このときの測定球33の変位の方向から測定プローブ15を被測定物13に再度アプローチさせることを繰り返す。そして、アプローチの方向と測定ヘッド29に対する測定球33の変位の方向とが概略一致したときの測定球33の変位量と測定ヘッド29の3次元座標位置とに基づいて接触点における被測定物13の3次元座標を求める。
(もっと読む)
測定ヘッド調整装置、及び測定ヘッドの調整方法

【課題】
測定ヘッドの調整を容易にし、複数台の調整であっても短時間で実施可能とする測定ヘッド調整装置を提供すること。
【解決手段】
位置合わせされた測定ヘッド11を測定ヘッドホルダ17に固定し、ワークホルダ12に固定されたワークWが、スライダ13により測定ヘッド11と相対的にX、Y、Z方向移動されてスライダ13の位置決めを行い、スライダ13が固定された後に測定ヘッドホルダ17から測定ヘッド11を外し、測定ヘッドホルダ17に新たな測定ヘッド11を固定して、固定された新たな測定ヘッド11を調整する。
(もっと読む)
振幅型走査プローブによる測定対象物の表面の走査方法
【課題】 複雑な表面を効果的に走査することが可能であり、測定の細かな精度が、表面の形状に関係なく保証される。
【解決手段】 駆動手段と、該駆動手段の制御手段と、測定対象物の表面の理論的形状と座標を記憶するための記憶手段とを含んだ座標測定機(4)による走査方法が、走査プローブ先端部(10)が測定対象物の表面(1)に接触する際に生じる接触力(F)についての設定範囲を決定する過程と、走査プローブ先端部(10)が測定対象物の表面(1)に接触するように位置づける過程と、所定の軌道に沿って支持体(3)を動かす過程と、測定対象物の表面(1)に対する支持体(3)の相対的な移動と同時に支持体(3)に対する走査プローブ(2)の移動を起こす過程とを含み、制御手段が、走査経路に沿って駆動手段の動作を調整し、走査の全体にわたって接触力Fを設定範囲内に維持する。
(もっと読む)
ワーク基準点機上検出方法及びその方法を用いた加工装置
【課題】基準点であるワークの端縁を機上で測定器によって高精度に短時間で検出することができるワーク基準点機上検出方法及びその方法を用いた加工装置を提供する。
【解決手段】ワーク支持台と工具台とを相対移動させて測定器のプローブをワークに当接させてばね力に抗して後退させる。ワーク支持台と工具台とをX軸又はY軸方向に走査速度で相対移動させて、プローブをワークの端縁から離脱させる。プローブがワークの端縁から離脱してZ軸方向に前進する速度が所定速度となったとき、ワーク支持台と工具台との相対位置を位置検出装置によって検出する。検出されたX軸又はY軸方向の相対位置と、プローブがワークの端縁と一致してからワークの端縁から離脱して前進する速度が所定速度となるまでの間にワーク支持台と工具台とが相対移動する補正距離とに基づいてワークの端縁を基準点として検出する。
(もっと読む)
座標測定システム及び座標測定方法
【課題】エラーがなく、正確に測定でき、高速走査に耐えられる座標測定システムを提供する。
【解決手段】 回転軸(65)を中心にロータ(100)が回転することで、接触プローブ(15)の半径アーム(149)先端に針(123)を介して取り付けた接触ボール(120)が移動する座標測定システムについて、回転軸(65)のスライド移動とロータ(100)の回転の組み合わせから生じる経路に沿って、測定対象部品の測定地点の座標を接触ボール(120)の接触で測定するに際し、測定対象地点の接触ボール(120)の位置が、ロータ(100)の回転軸(65)に対して距離(r)だけオフセットしている。
(もっと読む)
表面性状測定装置、表面性状測定方法及び表面性状測定プログラム
【課題】測定の高速化を図った表面性状測定装置、表面性状測定方法及び表面性状測定プログラムを提供することが可能である。
【解決手段】ワーク表面31aにプローブ17を追従させて、プローブ17先端の接触子17aと被測定物表面31aとの接触を検出しワーク表面31aの性状を測定する表面性状測定装置であって、接触子17aを移動させる経路の始点と終点との間を複数の区間に分割する経路情報分割部51bと、複数の区間毎に経路情報に基づき終点から始点へと区間毎に接触子17aの移動速度を算出する移動速度算出部41aaと、移動速度算出部41aaにて移動速度を算出済みの区間において接触子17aを移動させる接触子移動制御部41abとを備える。
(もっと読む)
較正の方法および装置
工作機械などの機械に取り付けられた測定プローブ(4)を備える装置を較正する方法を記載する。機械は、測定プローブの位置を示す機械位置データ(x、y、z;70;80)を取り込むように構成され、測定プローブは、測定プローブ(4)に対する表面の位置を示すプローブデータ(a、b、c;72;82)を取り込むように構成されている。測定プローブ(4)は、振れ可能なスタイラス(14)を有するアナログプローブまたは走査プローブであってよい。この方法の第1のステップは、プローブデータ(a、b、c;72;82)および機械位置データ(x、y、z;70;80)を取り込む間に加工物(30;40、42)に対して知られた速度で測定プローブ(4)を動かすことを含む。具体的には、測定プローブ(4)は、測定プローブ(4)に対する加工物の表面上の2つ以上の箇所の位置を示しているプローブデータ(a、b、c;72;82)が取り込まれることを可能にする経路に沿って動かされる。この方法の第2のステップは、機械位置データ(x、y、z;70;80)およびプローブデータ(a、b、c;72;82)を解析し、そのデータからプローブデータおよび機械位置データを取り込む際の相対的遅延(すなわち、いわゆるシステム遅延)を決定することを含む。  (もっと読む)
(もっと読む)
接触式変位センサのスタイラス及びその製造装置並びに接触式変位センサ
【課題】マイクロマシンを構成するマイクロパーツやマイクロレンズアレイのような微細形状測定に適し、高い分解能を実現することができる接触式変位センサのスタイラス及びその製造装置並びに接触式変位センサを提供する。
【解決手段】スタイラス軸1の先端にボール2を取り付けた接触式変位センサのスタイラスであって、スタイラス軸1の先端部1aが先端に向かって細くなる錐状であって、ボール2がガラス、カーボン、セラミックあるいは金属から成り、直径100μmないし0.02μmである。
(もっと読む)
座標測定器の動作制御
本発明は、例えば、最大速度、最大加速度、移動範囲の限界位置又は信号検出の限界値などの、動作中有効性を保持すべき少なくとも一つの動作パラメータを算定する、座標測定器(11)の動作を制御する方法に関する。座標測定器(11)の複数のコンポーネント(11,12,13,14,16,17,18,19)にそれぞれ動作パラメータの値、動作パラメータを算定するための規則及び動作パラメータを算定するための情報の中の一つ以上を割り当てる。複数のコンポーネント(11,12,13,14,16,17,18,19)に対して、動作パラメータの算定シーケンスを規定する。規定された算定シーケンスで動作パラメータを算定する際、各コンポーネント(11,12,13,14,16,17,18,19)に対して、次の措置を実施するものとして、シーケンスの第一の位置に有るコンポーネント(11)から開始し、i)動作パラメータの値がコンポーネント(11,12,13,14,16,17,18,19)に割り当てられている場合には、その値を動作に関して有効な動作パラメータの値として採用する措置、ii)動作パラメータの値がコンポーネント(11,12,13,14,16,17,18,19)に割り当てられていない場合には、それまでの有効な動作パラメータの値を引き続き有効なままとする措置、iii )シーケンス内に更に別のコンポーネント(12,13,14,16,17,18,19)が存在する場合、そのコンポーネントに関して前記の措置を繰り返す。  (もっと読む)
(もっと読む)
座標測定機のための改良された継ぎ手軸
本発明の1つの態様は、第1の端と、第2の端と、それらの間の複数の継ぎ合わせアームセグメントと、を有する関節付きアームを含む座標測定機器を含み、各アームセグメントは、少なくとも1つの位置トランスデューサを含む。アームの第2の端には、測定プローブアセンブリが結合される。測定プローブアセンブリは、アームの第2の端と測定プローブアセンブリのボディとの間に第1の回転軸を提供する第1の継ぎ手を含む。エンコーダは、エンコーダケースおよびエンコーダシャフトを含む。エンコーダケースは、ボディに剛結合されるエンコーダシャフトに対して第2の軸を中心に回転するように構成される。エンコーダシャフトにプローブが剛結合される。第2の軸を中心にプローブに対して回転するように、測定機器がエンコーダケースに結合される。 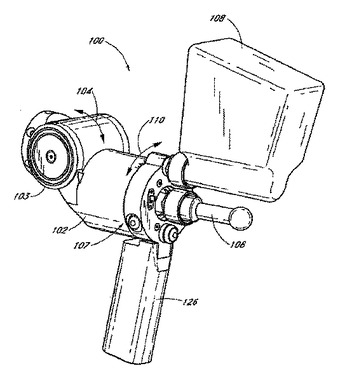 (もっと読む)
(もっと読む)
三次元測定プローブ
【課題】非球面レンズなどの測定物の形状等をより高精度に測定でき、壊れにくく長寿命、低コストの三次元測定プローブを実現する。
【解決手段】小エアー軸受け部7Aに取り付けられた磁石29とヨーク8と小摺動軸部6に取り付けられた磁性体ピン20とが磁気回路を形成することにより、小摺動軸部6の回転と軸方向の変位を妨げる磁力を発生させる。非接触の磁力なので下からでも横からでも測定できる三次元測定プローブとなる。
(もっと読む)
工作機械を用いてワークピースを測定する方法
可撓性のスタイラス(12)を有するアナログ式プローブ(4)を用いて、工作機械上のワークピース(6、30、60、100)を測定する方法が記載されている。方法は、工作機械の作業領域内に配置されている、名目上の表面プロフィール(32)を有するワークピース(6、30、60、100)を受け取るステップを備えている。工作機械は、ワークピース(6、30、60、100)に対してアナログ式プローブ(4)を所定の(既知の)測定経路(40、64、102)に沿って移動し、スタイラス(12)の撓みを測定するのに用いられる。アナログ式プローブ(4)は、ワークピース(6、30、60、100)に対して5mm/sec以上の速度で移動し、所定の測定経路(40、64、102)は、スタイラスがワークピースのプロフィールが不連続部分を示すワークピースから空間的に離されるように選択される。  (もっと読む)
(もっと読む)
ボールディメンジョンゲージ装置
【課題】 接触型3次元座標測定機と非接触型3次元座標測定機との両方の測定機用に容易に変更可能にするとともに、球体をゲージ本体側との間の応力影響がほとんど作用しないようにして保持できるようにし、振動や衝撃に対して、また、接触型3次元座標測定機用と非接触型3次元座標測定機用との変更時においても、標準値が変化する事態を極力防止して寸法安定性の向上を図る。
【解決手段】 3次元座標測定機の定盤上に設置されるゲージ本体1と、ゲージ本体1に保持される複数の球体Gとを備えて構成され、球体Gを磁着性材料で形成するとともに、球体Gとして、接触型3次元座標測定機に用いられる接触型球体G(a)と、非接触型3次元座標測定機に用いられる非接触型球体G(b)との二種類の球体Gを備え、ゲージ本体1に、永久磁石を備えて形成され接触型球体及び非接触型球体のうちから選択された何れかの球体Gを磁着保持する保持体10を付設した。
(もっと読む)
形状測定装置
【課題】ワーク表面にプローブ球を接触させて一定力で押しながら測定を行う形状測定装置において、プローブの倒れや曲がりによる誤差を補償する。
【解決手段】プローブ球1をワークWに接触させて測定する形状測定装置において、プローブ2の倒れや曲がりによるプローブ球1の変位を3次元的に測定する2組のプローブ球位置測定ユニット10を設ける。プローブ2、ハウジング8、板バネ6、支柱4等を含むプローブユニットの3次元位置を干渉計18a〜18c等から求めて、その位置情報と、プローブ球位置測定ユニット10から得られた位置情報とから、ワークWの表面形状を表わす測定データを算出する。
(もっと読む)
可搬型座標測定装置
可搬型座標測定装置(CMM)を開示する。CMMは向き合った第1および第2端部と、第1の関節アームに取り付けられた測定プローブとを有する、手動で位置決めができる関節アームを有してもよい。アームは複数の接合アーム部位を有してもよい。各アーム部位は位置信号を生じる少なくとも1つの位置トランスデューサを有してもよい。CMMは、位置信号をトランスデューサから受信し、選択された空間においてプローブの位置に対応するデジタル座標を提供する電子回路を有してもよい。少なくとも1本のアーム部位はその長さに沿って非直線的でもよい。  (もっと読む)
(もっと読む)
斜め加工のための5軸加工機の姿勢保証システム
【課題】それぞれ傾斜穴の傾斜、方位に基づいて、加工を始める前に主軸頭やテーブルの旋回角度の誤差を測定しておき、自動的に主軸頭やテーブルの旋回角度を補正しながら斜め加工を実施できるようにする。
【解決手段】特定のワークの加工を開始する前の段階で、当該ワークについて加工するすべての傾斜穴の傾斜角度、方位などの形状データに基づいた測定プログラムの実行により、当該ワークに行う各傾斜穴加工のすべてについて、その傾斜角度に前記主軸頭10を旋回させたときのA軸角度の目標値と実際の測定値との誤差である変位角度を測定し、ワークのすべての傾斜穴加工について、変位角度が許容範囲内になるように補正したA軸角度を記憶させ、当該ワークの加工プログラムをNC装置で実行したときにすべての傾斜穴について補正後のA軸角度を読み出し、各斜め加工を実行するときのA軸角度を前記補正後のA軸角度で指令する。
(もっと読む)
形状測定装置及び形状測定方法
【課題】物体に形成された測定対象物の形状を低測定力で高感度かつ高精度で測定が可能な形状測定装置及び形状測定方法を提供する。
【解決手段】基部側に発光器11及び受光器12が設けられ、先端に光を反射する光反射部13が設けられて自由状態で垂直配置された先側領域14を有し、先側領域14の一部の曲げ歪みによって通過光に光量変化を発生させる撓み検知部15が形成された光ファイバ16と、光ファイバ16の先端部に固着配置された探触子17と、光ファイバ16の下方に配置され測定対象物18が形成された物体19を載せるXYテーブル20と、XYテーブル20を相対的に上下するZ方向昇降手段21とを有し、探触子17に測定対象物18を側方から当接させて受光器12での光量変化を検知し、探触子17に測定対象物18が当接した際の探触子17の位置から測定対象物18の二次元形状を測定する。
(もっと読む)
多数の測定点の空間座標を判定するための方法および装置
測定対象(26)の輪郭(25)に沿った多数の測定点(24)の空間座標を判定するために、プローブ(20)で移動可能に支承された探触素子(22)を有するプローブ(20)が用意される。プローブ(20)が輪郭(25)に沿って移動するとき、プローブ(20)の位置測定値(28〜32)と、プローブ(20)に対して相対的な探触素子(22)の変位量(70)が判定される。位置測定値(28〜32)と変位量(70)とから輪郭(25)に沿った測定点(24)の空間座標が判定される。定義された接触力をアクチュエータ(62)によって生成することによって、プローブ(20)の移動時に探触素子(22)が輪郭(25)と接触保持される。本発明の1態様によれば、プローブ(20)に対して相対的な探触素子(22)の加速度(105;134)に依存して接触力が設定される。
(もっと読む)
形状測定機
【課題】プローブユニットの小型化、簡素化を図ることができる形状測定機を提供すること。
【解決手段】ルビー球(先端部)2を有するプローブ軸部3と、被測定物Oの測定面OSとプローブ軸部3のルビー球2との接触点の空間位置座標を検出する変位計(検出部)5とが設けられたプローブユニット6を備えた形状測定機であって、被測定物Oの測定面OSにルビー球2を押付けたときにプローブ軸部3に作用される力、及び、このときに測定された空間位置座標とをパラメータとして記憶する記憶部7と、パラメータに基づいて、測定時におけるプローブ軸部3の傾きに起因する被測定物Oの真の空間位置座標からの誤差を補正する補正値を算出する演算部8と、を備えている。
(もっと読む)
三次元センサおよび接触プローブ
【課題】測定の不確かさを軽減し、測定対象物の姿勢及び変位量についての測定精度を向上させ、かつ、高速応答が可能な三次元センサを提供する。
【解決手段】光源2からの光を2分割し一方を参照光c1として参照ミラー10に照射し、他方を測定光c2として測定対象物9に照射する第1のPBS3と、参照ミラー10で反射した参照光c1と測定対象物9で反射した測定光c2とを2分割してそれぞれ干渉させる第2のPBS4と、一方の干渉光c5を所定の測定直線14上に導く第1の光学系5と、他方の干渉光c6を光軸を法線とする平面にて90度回転させて前記測定直線14上に導く第2の光学系6と、測定直線14上にて干渉光c5,c6を受光するラインイメージセンサ8とを備えた。
(もっと読む)
141 - 160 / 208
[ Back to top ]