
Fターム[2F062FF05]の内容
機械的手段の使用による測定装置 (14,257) | 走査 (1,305) | 走査方向 (1,174) | 検出部が移動するもの (846) | 三次元 (208)
Fターム[2F062FF05]に分類される特許
41 - 60 / 208
工作機械における工作物測定方法およびその装置
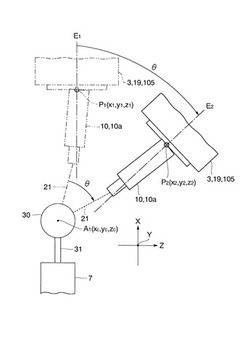
【課題】計測器を別途使用しなくても、工作物測定用の測定ヘッドが本来有している測定機能を有効利用して測定ヘッドの3次元オフセットを取得して、測定ヘッドで工作物を測定する工作物測定方法を提供する。
【解決手段】工作機械に取付けられた測定ヘッド10を所定角度旋回させて基準球30を第1の方向E1と第2の方向E2から測定することによって、基準球における中心点A1の座標を取得する。測定ヘッドが基準球の中心点を第1の方向から測定したときの測定ヘッドの第1の機械座標と、測定ヘッドが基準球の中心点を第2の方向から測定したときの測定ヘッドの第2の機械座標とに基づいて、測定ヘッドの3次元オフセットを取得する。その後、測定ヘッドの3次元オフセットを使用して、工作物を測定ヘッドで測定する。
(もっと読む)
遠隔計測対象の遠隔計測方法とそれに用いる遠隔計測具

【課題】遠隔操作対象の2点間計測を、これら2点間との機械的な直接接触のもとに容易かつ確実に直接計測することができるようにする。
【解決手段】作業者Cの計測動作域Aから、作業者Cが直接触れ難い遠隔計測対象Bの一方の計測端B1に、計測触子1を止め付けた遠隔計測竿2と、計測動作位置Aから計測対象Bの他方の計測端b2に、計測触子3を止め付けた遠隔計測竿4と、の間で、それら遠隔計測竿2、4の計測元2a、4a側に寄って設定した交差点5を境にした計測触子1、3までの長さL1と計測元2a、2bまでの長さL1との予め知った比と、遠隔計測竿2、4の、計測動作域A側で得た計測元2a、2b間の距離値S1と、に基づき、計測端B1、B2間の長さや間隔S2を遠隔計測するようにして、上記の課題を解決する。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
三次元測定機
【課題】測定箇所の測定データを適切に取得できて操作性も良い手動式の三次元測定機を提供する。
【解決手段】三次元測定機1は、被測定物を測定するためのプローブ2と、プローブ2を移動させる三次元測定機本体3と、三次元測定機本体3を制御する制御手段10とを備え、プローブ2が三次元測定機本体3を介して手動で移動されるものであって、外部からのトリガ指令T3をプローブ2及び三次元測定機本体3に外力を作用させずに入力させるマイク6を有し、制御手段10は、トリガ指令T3に基づいて測定データを取得する動機となるトリガ信号を生成する音声処理部101と、トリガ信号を音声処理部101から受け取ることによって測定データを取得するデータ取得部102とを備える。
(もっと読む)
歯車測定装置の校正方法
【課題】機械的な基準部材を用いることなく、測定子の位置の校正をする。
【解決手段】基礎円の接線方向走査方法により歯車の歯形を求めこのときの歯形こう配誤差α1と、基礎円の接線方向以外の走査方法により歯車の歯形を求めこのときの歯形こう配誤差α2との偏差である、歯形こう配誤差の差Δαを求める。歯形こう配誤差の差Δαと歯車の諸元を用いて、位置誤差Δxを求め、位置誤差Δxに応じて測定子の位置の校正をする。
(もっと読む)
三次元測定機の校正方法
【課題】接触式三次元測定機を容易に校正可能な三次元測定機の校正方法を提供する。
【解決手段】単一の基準球面1aにプローブ2を倣わせてその軌跡を測定データとして取得し、前記測定データを球状に座標変換する座標変換量とその球の半径を算出し、前記座標変換量から直角度誤差を校正し、前記球の半径から基準球面の半径を差し引くことで、プローブ先端球の半径を校正する。
(もっと読む)
形状測定方法
【課題】高精度でなく安価な姿勢変更機構でも、被測定物を高精度に測定することができる形状測定方法を提供する。
【解決手段】被測定物Wを載置したテーブル14の姿勢を傾ける姿勢変更機構4を備え、プローブによって被測定物の形状を測定する形状測定方法。テーブル14の被測定物載置面14Aに3つの基準球21,22,23を互いに離間して配置し、この3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更前基準面を算出する。次に、姿勢変更機構を動作させてテーブルの姿勢を傾けたのち、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更後基準面を算出する。そして、姿勢変更前基準面と姿勢変更後基準面とから姿勢変更機構により傾けられたテーブルの姿勢傾き量を算出する。
(もっと読む)
微細接触力調整機構を有する接触式計測装置
【課題】空圧と永久磁石による接触力調整において、微細な接触力を自動的にかつ正確に調整することが可能な微細接触力調整機構を有する接触式計測装置を提供する。
【解決手段】工作機械を制御する数値制御装置8から電空レギュレータ40へ電圧の微調整指令を行って、電空レギュレータの空気圧を微調整し、その時のプローブ1bの変位と接触力f1との関係を同時に取得しパーソナルコンピュータ11に備わった記憶装置に格納する。数値制御装置8による電空レギュレータ40の制御は、数値制御装置の記憶装置に格納されたデータから、電空レギュレータ40に指令する電圧に変換し、数値制御装置8に接続された電空レギュレータ40の圧力の調整を行う。電空レギュレータ40を用いることにより、レギュレータ36により絞られた1次降圧された圧縮空気を電空レギュレータ40において再度絞って2次降圧する。
(もっと読む)
表面性状測定機
【課題】スタイラスの交換時期を適正に知らせることができる表面性状測定機を提供する。
【解決手段】操作キー51〜58によって入力されたしきい値を記憶するしきい値記憶部64と、スタイラス33のトレース方向の移動距離を検出するスタイラス移動距離検出器36と、このスタイラス移動距離検出器によって検出されたスタイラスの移動距離を累積記憶する累積移動距離記憶部65と、しきい値記憶部64に記憶されたしきい値と累積移動距離記憶部65に記憶された累積移動距離とを比較し、累積移動距離がしきい値を超えたときにスタイラスの交換を表示器41に表示する報知手段(制御手段70)とを備える。
(もっと読む)
表面形状測定装置
【課題】被測定物の表面形状を高い精度で測定し得る表面形状測定装置を提供する。
【解決手段】表面形状測定装置500は、被測定物600を支持する被測定物台510と、力感知部100と、力感知部100と被測定物600を互いに近づけるまたは遠ざけるために力感知部100と被測定物600を相対的にZ軸に沿って移動させるZ走査機構540と、Z軸に直交するX軸に沿って力感知部100と被測定物600を相対的に移動させるX走査機構520とを備えている。力感知部100は、被測定物600に近接されて被測定物600から力を受けるプローブを含み、このプローブが被測定物600から受ける力を感知する機能を有している。
(もっと読む)
三次元測定機
【課題】簡素な処理でプローブや移動機構と、被測定物とが衝突したか否かを迅速に判定することができる三次元測定機の提供。
【解決手段】三次元測定機1は、被測定物を測定するためのプローブ21と、プローブ21を移動させる移動機構22と、モーションコントローラ3とを備える。モーションコントローラ3は、移動機構22にてプローブ21を移動させるための電流値を検出する電流値検出部33と、プローブ21にて被測定物を測定する測定モードと、被測定物を測定することなくプローブ21を移動させる移動モードとを識別するモード識別部34と、電流値検出部33にて検出される電流値と、モード識別部34による識別結果に応じて設定される閾値とに基づいて、移動機構22にかかる負荷の状態を判定する負荷判定部35とを備える。
(もっと読む)
三次元測定機
【課題】プローブや移動機構と、被測定物との衝突を判定するための適切な閾値を設定することができ、プローブや移動機構と、被測定物とが衝突したか否かを迅速に判定することができる三次元測定機の提供。
【解決手段】三次元測定機1は、被測定物を測定するためのプローブ21と、プローブ21を移動させる移動機構22と、モーションコントローラ3とを備える。モーションコントローラ3は、移動機構22にてプローブ21を移動させるための電流値を検出する電流値検出部33と、電流値検出部33にて検出される電流値と、移動機構22にてプローブ21を移動させる速度の目標値に応じて設定される閾値とに基づいて、移動機構22にかかる負荷の状態を判定する負荷判定部34とを備え、速度の目標値と、閾値との関係は比例関係である。
(もっと読む)
マルチバスアーム技術を用いた可搬型の関節アーム座標測定機
手動で位置付けることが可能な関節アーム部と、測定デバイスと、電子回路とを含む、マルチバスアーム技術を用いた可搬型の関節アーム座標測定機(AACMM)。電子回路は、アーム部からの位置信号を受信し、測定デバイスの位置に対応するデータを提供するように構成される。AACMMは、プローブ端と、アクセサリデバイスと、エンコーダデータバスと、第1のデバイスデータバスとをさらに含む。エンコーダデータバスは、アーム部および電子回路に結合され、エンコーダデータバスは、電子回路に位置信号を送信するように構成される。第1のデバイスデータバスは、アクセサリデバイスおよび電子回路に結合される。第1のデバイスデータバスは、アクセサリデバイスから電子回路にアクセサリデバイスデータを送信するために、エンコーダデータバスと同時に、エンコーダデータバスとは独立して動作するように構成される。 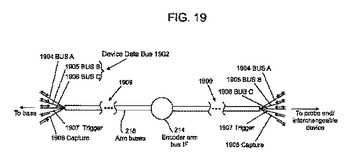 (もっと読む)
(もっと読む)
組み込みアーム歪みセンサ
可搬型の関節アーム座標測定機(AACMM)が、手動で位置付けることが可能な関節アーム部と、第1の端部に装着された測定デバイスと、AACMMの構造的コンポーネントであって、軸方向を有する、構造的コンポーネントと、構造的コンポーネントに結合された、それぞれが受感軸を有する少なくとも3つの歪みゲージセンサであって、各歪みゲージセンサの受感軸が、軸方向に対してほぼ平行に向きを決められ、各歪みゲージセンサが、軸方向に垂直な横断面によってほぼ横切られ、アナログ歪みゲージ信号を生成し、歪みゲージセンサが、構造的コンポーネントと横断面の両方の上に存在する任意の点の曲げ歪みを判定するのに十分なデータを提供するように配置される、歪みゲージセンサと、位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。 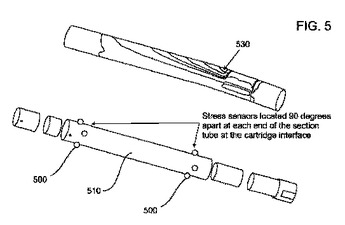 (もっと読む)
(もっと読む)
座標測定機用ディスプレイ
基部を有する可搬型の関節アーム座標測定機が、提供される。カバーが、閉じた位置と開いた位置の間を動くように基部に回転可能なように結合される。ディスプレイが、カバー内に配置される。ディスプレイは、筐体の片側に配置された、タッチスクリーン面などのスクリーン面を含む。スクリーン面は、閉じた位置において基部に近接し、開いた位置において基部に対して斜めに配置される。 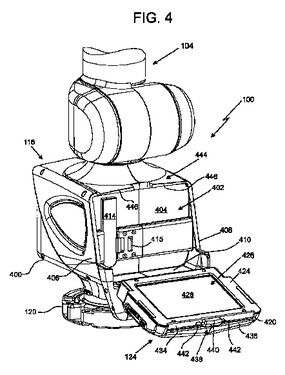 (もっと読む)
(もっと読む)
照明付きプローブ端を有する座標測定機および動作方法
可搬型の関節アーム座標測定機(AACMM)が、提供される。AACMM(100)は、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム(104)を含む。アーム(104)は、複数の接続されたアームセグメント(106、108)を含み、アームセグメント(106、108)のそれぞれは、位置信号を生成するための少なくとも1つの位置トランスデューサを含む。測定デバイス(118)が、AACMM(100)の第1の端部に装着される。トランスデューサからの位置信号を受信するための、および測定デバイス(118)の位置に対応するデータを提供するための電子回路(210)が、設けられる。光源(402)が、アーム(104)に結合され、測定デバイス(118)の近くに光を放射するように配置される。 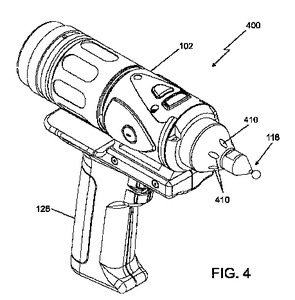 (もっと読む)
(もっと読む)
多機能座標測定機
可搬型の関節アーム座標測定機(AACMM)が、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能なアーム部であって、接続されたアームセグメントを含み、各アームセグメントが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型のAACMMを実装することが、データが送信される送信経路を判定することによって、データが受信される送信元デバイスを特定するステップであって、送信元デバイスが、AACMMの第1の端部に取外し可能なように装着される、ステップと、送信元デバイスの特定情報に基づいてデータのデータタイプを判定するステップと、データタイプに応じてデータに対してアクションを実行するステップと、アクションを実行した結果を送信先デバイスに出力するステップとを含む。 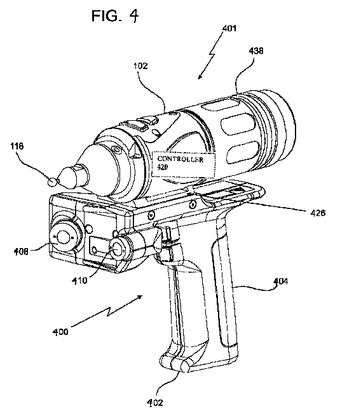 (もっと読む)
(もっと読む)
取り外し可能なアクセサリを有する座標測定機
可搬型の関節アーム座標測定機(100)が、提供される。座標測定機(100)は、アーム部(104)とともに基部(116)を含む。プローブ端(401)が、基部(116)から遠位にある、アーム部(104)の端部に結合される。プローブ端(401)は、締め具(438)および第1のコネクタ(428)を有する。デバイス(400)が、締め具(438)によってプローブ端(401)に取り外し可能なように結合され、デバイス(400)は、締め具(438)がデバイス(400)をプローブ端(401)に結合するときに第1のコネクタ(428)に係合するように構成された第2のコネクタ(429)を有する。 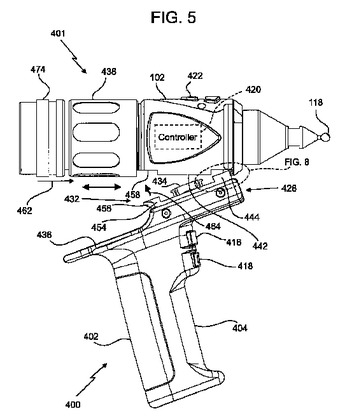 (もっと読む)
(もっと読む)
座標測定デバイスのためのカウンタバランス
可搬型の関節アーム座標測定デバイスが、提供される。座標測定デバイスは、基部と、少なくとも1つのアームセグメントを有する関節アーム部とを含む。付勢部材が、基部に第1の端部で結合され、関節アーム部に第2の端部で結合される。付勢部材の第1の端部は、第1の位置と第2の位置の間を動くことができる。アジャスタが、基部と付勢部材の間に結合される。アジャスタは、付勢部材の第1の端部を第1の位置から第2の位置に動かすために結合される。  (もっと読む)
(もっと読む)
駆動装置および測定装置
【課題】鉛直方向への駆動精度を向上させる
【解決手段】Z軸スピンドル19は、エアベアリング22−1および22−2により鉛直方向への移動がガイドされる。シャフトモータ23は、鉛直方向に延びるように配置されるシャフト25と、シャフト25に対して非接触で、シャフト25に沿った方向にZ軸スピンドル19を駆動させる駆動力を発生するスライダ26から構成される。また、エアシリンダ29は、シャフトモータ23のシャフト25によりZ軸スピンドル19の重量を支持し、Z軸スピンドル19の重量に見合う押上力を、Z軸スピンドル19の移動に応じて発生する。本発明は、例えば、プローブにより形状を測定する三次元測定装置に適用できる。
(もっと読む)
41 - 60 / 208
[ Back to top ]