
Fターム[2F062FF05]の内容
機械的手段の使用による測定装置 (14,257) | 走査 (1,305) | 走査方向 (1,174) | 検出部が移動するもの (846) | 三次元 (208)
Fターム[2F062FF05]に分類される特許
161 - 180 / 208
表面形状測定装置

【課題】高速かつ高精度に倣い測定できる表面形状測定装置を提供する。
【解決手段】倣いベクトル指令部220から発せられた倣いベクトル指令に基づいて駆動機構の動作状態を推定して推定動作状態量を算出する動作推定部600と、動作推定部600にて算出された推定動作状態量に応じて駆動センサの検出値を補正演算する補正演算部700と、を備える。
動作推定部600は、倣いベクトル指令が発せられてから倣いプローブの移動位置に反映されるまでの信号伝達特性であるノミナルモデルが設定されたノミナルモデル設定部311を有し、補正演算部700は駆動中の駆動機構が変形することによって生じる測定誤差を補正する補正量を推定動作状態量に基づいて算出する補正量算出部720と、駆動センサおよび検出センサによる検出値と補正量算出部720にて算出された補正量とを合成して測定データとする測定データ合成部430と、を備える。
(もっと読む)
ワーク測定方法及びその装置

【課題】本発明の目的は倣いプローブによるポイント測定が高精度に行えるワーク測定装置を提供することにある。
【解決手段】ワーク測定面20に対し倣いプローブ12を予め設定されたアプローチ方向から接触させた際に倣いプローブ12からの変位量及び座標値検出手段16からの座標値を収集させる測定制御手段24と、該変位量に基づきワーク測定面20の法線方向を算出する法線算出手段26と、該法線方向と該アプローチ方向との角度差が閾値よりも大の場合は該アプローチ方向が不適切と判断する判定手段28と、不適切と判断された場合は該角度差に基づき倣いプローブ12のワーク測定面20へのアプローチ方向がワーク測定面20の法線方向となるように該アプローチ方向の設定を修正し、該測定、該法線算出及び該判定の再実行を指示する指示手段30とを備えたことを特徴とするワーク測定装置10。
(もっと読む)
表面感知デバイス
被加工物の表面を測定するための装置が説明される。装置は、座標位置決め機械のような機械(26)の可動アームに取り付けられ、そして、第1回転軸(1A)および第2回転軸(2A)まわりに回転でき、それら軸がそれぞれ第1モーター(M1)および第2モーター(M2)によって駆動される、支持体(7)を備える。装置は、付加的に、第3回転軸(4A)まわりに回転できる、被加工物の表面を感知するための表面感知デバイス(4)を備える。この第3回転軸(4A)は、第1回転軸(1A)に合わさることができ、合わされた場合、表面感知デバイス(4)に対する支持体(7)の回転は、表面感知デバイス(4)がホルダー(70)によって動かないように保持されるとき、第1モーター(M1)によって作動可能である。被加工物の表面を測定するための装置を使用するための方法は、また説明される。 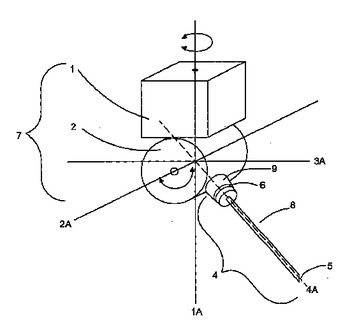 (もっと読む)
(もっと読む)
知的プローブ
本システム、方法、製品、ソフトウェア及び装置は知的プローブシステム又はその構成部分である。本発明のある実施形態では、1個又は複数個の可換なプローブ内にICチップを埋め込んであるので、CMM上でのプローブ換装を、何回でも、迅速に、容易に且つ誤りなく行うことができる。 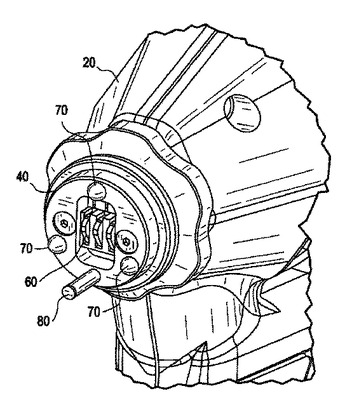 (もっと読む)
(もっと読む)
旋回継手組立体
多軸回転継手部およびボール継手部を含む旋回継手組立体(18、32;100;120;150)が記述される。多軸回転継手部は、実質的に交点(C;130)で交差する二またはそれ以上の回転軸(A、B、D)の周りの回転運動を提供する。ボール(92;116;132;176)を含むボール継手部は、上述の交点の近辺に位置される。旋回継手組立体は、一またはそれ以上のプラットフォームに対して荷重メンバー(60;108;128;156)および計測メンバー(46;154、158)の分離した結合を許容する。そのような旋回継手組立体を含むヘキサポッド座標計測機械(2)がまた記述される。 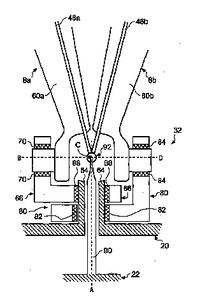 (もっと読む)
(もっと読む)
眼鏡枠形状測定装置
【課題】フレーム溝からの測定子の脱落、リムの変形等を防止し、上下方向の変位を正確に測定することができる眼鏡枠形状測定装置を提供する。
【解決手段】眼鏡フレームのリム35A(35B)の内周面に形成されたフレーム溝36に沿って移動するスタイラス37を、Z方向保持機構66によって上下動自在に保持する。Z方向保持機構66を、上端にスタイラス37が取付けられた上下動自在なロッド65と、このロッド65を形状測定時に押し上げて所定の高さ位置に保持するバランスばね80とで構成する。スタイラス37とフレーム溝36とを一致させる機構(67)は、通常スタイラス37を退避位置Tに退避させており、スタイラス37をフレーム溝36に係入させるとき、アクチュエータ90の駆動によって可動体85をバランスばね80に抗して上昇させ、スタイラス37とフレーム溝36を一致させる。
(もっと読む)
物体を測定するための方法
工作物(40)などの物体の寸法が公差に合致しているかどうかを決定するための「go、no−go」法について説明される。この方法は、座標測定機械、工作機械、旋盤などの測定装置に設置されたタッチトリガー、アナログ、または非接触プローブなどの測定プローブを使用する。この方法は、物体の公差に基づいた物体に対する経路の周囲で測定プローブを動かすステップを含む。物体に対する経路は、物体の最大公差に基づいた少なくとも1つの第1経路(46)と、物体の最小公差に基づいた第2経路(44)とを含んでよい。この方法は、測定プローブが経路の周囲で動かされる際、そのプローブによって取得されるあらゆるプローブ測定データを監視するステップと、測定プローブが経路の周囲で動かされる際、取得されるプローブ測定データの状態が変化する場合のみ物体の寸法が公差に合致していないことを示すステップと、をさらに含む。 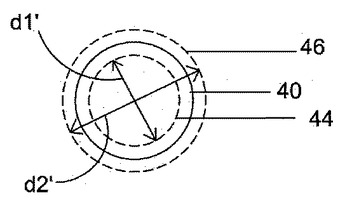 (もっと読む)
(もっと読む)
測定制御装置、表面性状測定装置、および、測定制御方法
【課題】測定能率を下げることなく、力センサおよび被測定物の接触時のオーバーシュートを簡単な構成で抑制できる三次元測定装置の提供。
【解決手段】三次元測定装置の接近制御手段234は、位置制御ループRPを有効にし、位置制御により駆動アクチュエータ133を駆動させて力センサ1を接近位置に到達させる。接触制御手段235は、力センサ1が接近位置に到達したことを認識すると、スイッチ227を制御して力制御ループRFを有効にし、力制御により駆動アクチュエータ133を駆動させて力センサ1を被測定物に接触させる。
(もっと読む)
差分較正
機械に装架された計測プローブ(10)を較正する方法が記述される。計測プローブ(10)は、ワークピースに接触する先端(16)を備えたスタイラス(14)を有する。方法は、プローブアウトプット(a、b、c)を機械座標系(x、y、z)に関連づけるプローブ較正マトリクスを決定することを含む。方法は、第一の機械データを得るために第一のプローブ偏位(d1)を用い、第二の機械データを得るために第二のプローブ偏位(d2)を用いて、較正アーティファクト(18)を走査する工程を含む。第一および第二の機械データは、いかなる機械誤差も実質的に除去される完全なプローブ較正マトリクスを得るために用いられる。有利には、方法は、第一および第二の機械位置データの差は既知であるとの仮定に基づいて、完全なプローブマトリクスを数学的に決定する。  (もっと読む)
(もっと読む)
三次元形状測定装置
【課題】大型の揚水ポンプや遠心圧縮機,往復圧縮機の内部に設ける羽根車を、安全かつ速やかに自動三次元測定する三次元形状測定装置を提供する。
【解決手段】羽根車の測定に際し、測定対象物の設計データたる三次元CADデータから、最適なスキャンパス情報を作成し、そのスキャンパス情報に基づき、アーム型三次元測定機の測定機手先部を三次元移動させる測定機取り付け部と、取得した表面形状情報を座標点群として順次記憶する制御端末とからなる。
制御端末内に設けた仮想空間内で、測定対象物を含めた実際の三次元測定にかかる構成機器から、装置の挙動をシミュレートし、最適なスキャンパス情報を作成する。スキャンパス情報は、中継ポイントと呼ばれる測定機取り付け部の三次元移動経路点と、その経路点間における測定機手先部の姿勢に関する情報からなる。
(もっと読む)
座標測定器による表面のスキャニング
本発明は、座標測定器(23)を用いて、加工物の表面を走査する方法であって、座標測定器(23)の走査部品(64)が、当該の表面と接触するとともに、走査部品(64)が、当該の表面に沿って接触を維持しながら移動(スキャニング)する方法に関する。座標測定器(23)には、加工物に関する走査部品の実行可能な動きの互いに独立した複数の自由度、例えば、直線軸の自由度が存在する。それらの自由度に関して、各自由度に関する走査部品(64)の移動速度成分の最大値を表す最大速度値を定義する。加工物の計画しているスキャニングに関して、そのスキャニングの際に走査部品(64)を動かすべき予測経路(スキャニング経路)を予め規定し、その場合実際のスキャニング経路が、加工物の実際のサイズに依存して、この予測したスキャニング経路からずれる可能性が有る。異なる自由度に関する最大速度値を考慮して、走査部品(64)の速度値を一定として、予測したスキャニング経路を通過させて行くことが可能なスキャニング速度の最大値を計算する。  (もっと読む)
(もっと読む)
工作物を測定する装置および方法
座標位置決め装置の部材上にある走査ヘッドに取り付けられた表面検出器を用いて表面を測定するための方法および装置。座標位置決め装置は、走査ヘッドと表面形状との間の相対移動を生成するために作動することができ、走査ヘッドは、1つまたは複数の軸の周りの表面検出プローブの回転動作を生成するための駆動装置を有する。座標位置決め装置は、円形経路で部材と表面形状との間の相対動作を生成するために駆動され、プローブヘッドは、表面検出器が名目上一定のリード角を維持するように上述の1つまたは複数の軸の周りに表面検出器を移動させるために駆動される。座標位置決め装置およびプローブヘッドの動作は同期的である。  (もっと読む)
(もっと読む)
加工品の測定装置および測定方法
座標位置決め装置の部材上の走査ヘッドに搭載された表面検知装置を使用して、表面を測定するための方法および装置。この座標位置決め装置は、走査ヘッドと表面プロフィールとの間の相対的な移動を生じさせるように動作することができ、この走査ヘッドは、1つまたは複数の軸の周りに表面検知探触子の回転移動を生じさせるための駆動部を含む。表面検知装置が追跡するであろう表面上の所望の測定プロフィール、および、表面検知装置がこの測定プロフィールをたどるときの表面検知装置の向きの所望の動作が決定される。このデータは、表面検知装置が測定プロフィールに沿った軌跡を指示するように、座標位置決め装置の部材と表面との間の相対的動作の必要とされる経路を導き出すために使用される。  (もっと読む)
(もっと読む)
眼鏡枠形状測定装置
【課題】 測定子が軽い力で動くと共に、装置構成を複雑化することなく、高速な測定を可能にする。
【解決手段】 眼鏡枠保持部と、回転支基と、回転支基に配置された測定子とを備え、回転支基を回転させ、測定子の動径方向及び高さ方向の移動を検知して眼鏡枠の三次元形状を測定する。スリット板を測定子と一体的に配置し、光を発する発光部と受光する画素を選択可能な2次元センサとを持つ投光受光ユニットを回転支基に配置する。2次元センサは、受光する画素が選択的に設定された平行でない第1受光ラインと第2受光ラインを持ち、スリット板は第1受光ラインに対して平行でない第1スリットと第2受光ラインに対して平行でない第2スリットとを持ち、第1受光ライン及び第2受光ラインでそれぞれ検出される第1スリット及び第2スリットの投影位置に基づいて測定子の動径方向及び高さ方向の移動位置を検知する。
(もっと読む)
表面性状測定機
【課題】オートセット動作や測定器追従機能においても、高精度な設定や測定が期待できる表面性状測定機を提供する。
【解決手段】被測定物Wと検出器8とを互いに直交する3軸方向へ相対移動させるY軸移動機構、Z軸移動機構(Zスライダ4)およびX軸移動機構6と、相対移動方向が被測定物の測定面と平行になるようにX軸移動機構6を傾斜させる傾斜機構(旋回プレート5)と、この傾斜角を記憶する傾斜角記憶手段と、傾斜角記憶手段に記憶された傾斜角に基づいて、被測定物Wと検出器8との相対距離が被測定物Wの測定面に対して垂直方向に変化するように、Z軸移動機構(Zスライダ4)およびX軸移動機構6の駆動を制御する制御手段とを備える。
(もっと読む)
座標測定機械及び座標測定機械を操作するための方法
本発明は、座標測定機械を操作するための方法及び座標測定機械に関し、この場合、少なくとも1つの電気モータMによって駆動される座標測定機械の座標測定装置、特に測定ヘッドは、少なくとも1つの方向に動くことが可能である。電気モータMの運動、このようにして、座標測定装置の運動を行うために、電気モータMを通して(ラインC11、C21の電流回路を介して)流れる駆動電流が測定される。電気モータMの運動又は座標測定装置5の運動が進行すべき目標速度に基づいて及び/又は目標加速度に基づいて、駆動電流について限界値が検出される(コンピュータPC及び/又はマイクロコントローラMCで)。駆動電流が検出された限界値IΤに達した場合及び/又は駆動電流が検出された限界値IΤを超えた場合、例えば、コンピュータPC又はマイクロコントローラMCが、電流回路に配置されたスイッチSW1、SW2の一方をオフにすることによって、座標測定装置5は所定の状態に設定される。  (もっと読む)
(もっと読む)
測定プローブ
【課題】感度が増大される測定プローブを提供する。
【解決手段】測定プローブは、懸架モジュール(112)およびトランスデューサモジュール(110)を備える。懸架モジュールおよびトランスデューサモジュールの両者は、互いに係合可能な配置要素(116,118)を有し、かつ、互いに着脱自在に連結可能である。懸架モジュール(112)は、ハウジング(114)、スタイラス(150)が連結された又は連結され得るスタイラスホルダ(140)、および、スタイラスホルダの懸架システムであって、これによってスタイラスホルダがハウジングに対して可動である懸架システム(142、144)を含み、トランスデューサモジュールは、懸架モジュールのハウジングに対するスタイラスホルダの移動を測定する少なくとも一つのトランスデューサ(200,210,220)を包含している。
(もっと読む)
物品受け台および計測器
【課題】 水平断面形状が略円形で、垂直断面形状が下方に向かうにつれ縮径または拡径となるテーパー側面部を有する物品を、周方向全域にわたって均等に馴染んで接する状態で受けることのできる物品受け台を提供する。
【解決手段】 水平断面形状が略円形で、垂直断面形状が下方に向かうにつれ縮径または拡径となるテーパー側面部7aを有する物品7を受ける物品受け台3に適用する。物品受け台3は、前記テーパー側面部7aに合致する対応テーパー部3aと、該対応テーパー部3aから物品7を離すように作用し、その作用が物品7の周方向に略均等であるように流体を放出する流体放出手段14とを設ける。
(もっと読む)
測定ヘッドのための調節デバイス
測定ヘッドのための調節機構、特に、座標測定機での測定ヘッドによって支持される測定プローブ3の較正を簡略化するための調節機構であって、プローブ・ボール7の測定位置を決定するための手段を備え、該手段が、プローブ・ボールの新たな測定位置を決定するためにプローブ・ボールを回転又は変位させる、或いはその両方を行うように構成され、それによりプローブ・ボール7のオフセットを求めることができる調節機構。  (もっと読む)
(もっと読む)
表面性状測定装置
【課題】傾斜を有する被測定物表面を高精度に倣い測定する表面性状測定装置を提供する。
【解決手段】 測定部210により被測定物表面を倣い走査する。測定部210は、接触部212を先端に有するスタイラス211と、接触部212が被測定物表面に当接した際のスタイラス軸方向の測定力を検出する測定力検出手段を有する。移動機構は、測定力を一定にしながら測定部210を被測定物表面に対して相対移動させる。
移動機構は、接触部210を回転中心として測定部210を回転させてスタイラス211を被測定物表面に垂直にする回転機構400を備える。
(もっと読む)
161 - 180 / 208
[ Back to top ]