
Fターム[2F062FF05]の内容
機械的手段の使用による測定装置 (14,257) | 走査 (1,305) | 走査方向 (1,174) | 検出部が移動するもの (846) | 三次元 (208)
Fターム[2F062FF05]に分類される特許
121 - 140 / 208
構成部品の実測データを調査する方法および装置
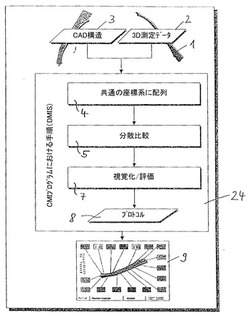
【課題】光学走査に由来する、構成部品の実測データを調査する方法を改良する。
【解決手段】構成部品1の実測データ2を、構成部品の実測データを調査する仮想座標測定機の仮想測定スタイラスを生成する接触式座標測定機用測定プログラム24を用いて調査する。
(もっと読む)
携帯型計測装置
携帯型計測装置のための方法及びシステムが記載される。本発明の1実施形態は、第1のリンクと、第1の自由度で移動するように動作可能な第1の連結器によって第1のリンクと連結される第1のプローブと、第2の自由度で移動するように動作可能な第2の連結器によって第1のリンクと連結される第2のプローブと、第1の連結器の動作と関係付けられる第1のセンサ信号を出力するように動作可能な第1のセンサと、第2の連結器の動作と関係付けられる第2のセンサ信号を出力するように動作可能な第2のセンサとを有する装置である。また、実施形態は、第1及び第2のセンサと連絡するプロセッサであって、第1のセンサ信号及び第2のセンサ信号を受信し、且つ少なくとも部分的に第1のセンサ信号及び第2のセンサ信号に基づいて第1のプローブと第2のプローブとの間の距離を判断するように動作可能なプロセッサを有する。 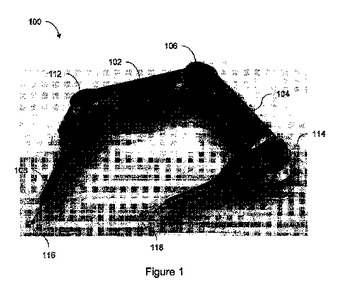 (もっと読む)
(もっと読む)
座標位置決め装置用測定プローブシステム

【課題】関連ユニットの真正性を確認するための認証モジュールを備えた測定システムを提供する。
【解決手段】物体を測定するための測定部と、関連ユニットからデータを受信および/またはこれにデータを送信するためのデータ伝送部とを具えた接触トリガー測定プローブ。測定機器はまた、関連ユニットの真正性を確認するための認証モジュールをも具えている。この認証モジュールは、一方向性ハッシュアルゴリズムを実行するためのプロセッサを含むことができる。真正性は、チャレンジ・レスポンス認証処理を用いて確認することができる。
(もっと読む)
レンズ枠形状測定装置
【課題】 クランプピンによるレンズ枠のクランプ状態を確認する際の視認性の向上を図ることができ、また、装置の信頼性の向上、品質面の向上を図ること。
【解決手段】 眼鏡フレームの上下方向に対向して開閉される一対の上側、下側スライダーを有し、左右のレンズ枠のそれぞれの下側枠及び上側枠をクランプする一対の開閉可能なクランプピンが上側、下側スライダーにそれぞれ設けられたフレーム保持機構を備え、測定子を眼鏡フレームのレンズ枠の溝に挿入し、測定子の移動を検出することによりレンズ枠の形状を測定するレンズ枠形状測定装置で、上側、下側スライダーの内の少なくとも手前側に位置するスライダーは、クランプピンがそれぞれ配置された右レンズ枠保持用のスライダーと左レンズ枠保持の左スライダーを備え、右スライダーと左スライダーがそれぞれ対向する側面の間に空間が形成されている。
(もっと読む)
レンズ枠形状測定装置
【課題】 クランプピンを短くしても眼鏡フレームを安定して保持可能で、測定可能なレンズ枠の上下幅を狭くでき、また、測定中に測定子等がクランプピンに干渉することを軽減でき、さらには、レンズ枠の横滑り及び変形を抑えることができる装置を提供する。
【解決手段】 眼鏡フレームの上下方向に対向して開閉される一対の上側、下側スライダーを有し、左右のレンズ枠の下側、上側枠をクランプする一対の開閉可能なクランプピンが上側、下側スライダーにそれぞれ設けられたフレーム保持機構を備え、測定子を眼鏡フレームのレンズ枠の溝に挿入し、測定子の移動を検出することによりレンズ枠の形状を測定するレンズ枠形状測定装置において、上側、下側スライダーは、レンズ枠の周縁に当接する当接部であって、クランプピンのそれぞれの近傍に左右の周辺よりレンズ枠側に突出した当接部を持つ。
(もっと読む)
三次元座標測定機
【課題】コンパクトに折り畳んで容易に持ち運ぶことができ、部品の搬入現場などで簡便に使用することできる三次元座標測定機を提供する。
【解決手段】1対のコラム2,3がベース1上に垂直に立設可能に配置され、1対のコラム2,3間にX軸ガイド4が水平に固定される。X軸ガイド4内でX軸方向に移動可能にX軸移動部7が配設される。ベース1上にY軸ガイド5が水平に配設され、Y軸ガイド5内にY軸方向に移動可能にY軸移動部8が配設される。Z軸ガイド6がX軸移動部7に対し垂直に固定され、Z軸ガイド6内にZ軸方向に移動可能にZ軸移動部9が配設される。1対のコラム2,3が、ベース1上のコラム基部2a,3aに対し折畳み軸2b、3bを介して折畳み可能に連結される。プローブ10が、Z軸移動部9に対し着脱可能に取り付けられる。
(もっと読む)
ベルマウス模型の3次元計測を用いてベルマウスの図面を製作する方法
【課題】ベルマウス模型の3次元計測を用いることによって、ベルマウス図面の精密な製作と同時に図面製作時間の短縮を可能にするベルマウス模型を用いたベルマウス図面製作方法を提供する。
【解決手段】実際のベルマウスの模型の3次元計測を用いることによって実際のベルマウスの図面を製作する方法であって、実際のベルマウスから縮尺したベルマウス模型を複数の断面に分割するステップと、縮尺したベルマウス模型の複数の断面を複数の曲線で表示するステップと、複数の曲線の座標を計測するステップと、計測された座標を利用してベルマウス模型の複数の断面図を形成するステップと、断面図を拡大することによって実際のベルマウスの図面を製作するステップとを含む方法が提供される。
(もっと読む)
動作コースの判定
アーチファクト(10)と、装置(28)との間の動作コースを判定するためのコンピュータ実施可能な方法。該装置(28)は、少なくとも1つの直線自由度(X、Y、Z)および少なくとも1つの回転の自由度(A1、A2)において、アーチファクトと装置とが互いに関連するように動作可能なアーチファクトと相互作用する。本方法は、アーチファクト(10)を表す幾何データを受け取ることと、装置(28)を表す幾何データを受け取ることと、1つまたは複数の最適化基準に準拠するように、装置およびアーチファクトをどのようにして相互作用経路に沿って互いに対して方向付けすることができるかを、前記幾何データから決定することと、を備える。  (もっと読む)
(もっと読む)
ボール溝測定方法
【課題】測定時のワーク中心軸に傾きがあっても正しいボール溝の測定が可能で、ボール溝加工精度の高精度検査を可能とし得るボール溝測定方法を提供する。
【解決手段】等速ジョイントのインナレース又はアウタレースのPCRを測定するボール溝測定方法であって、位置決めされたインナレース等の全ボール溝の延出方向各点の3D座標を測定する第1ステップ303〜308と、このステップで測定された3D座標群から仮のボール溝中心軸を求める第2ステップを備える。第3ステップ309では仮のボール溝中心軸によるPCR値を複数算出し、第4ステップ310〜311では算出されたPCR値群に基づいて全ボール溝に共通の球面を含む球体を求める。上記球体と3D座標群から真のボール溝中心軸を演算する第5ステップ312を備え、第6ステップ313ではその真のボール溝中心軸によるPCR値を算出する。このPCR値の再算出によれば、ワーク中心軸が傾いたままボール溝測定を行っても正しいPCR値が得られる。
(もっと読む)
表面形状測定装置
【課題】高速かつ高精度に倣い測定できる表面形状測定装置を提供する。
【解決手段】倣いベクトル指令部220から発せられた倣いベクトル指令に基づいて駆動機構の動作状態を推定して推定動作状態量を算出する動作推定部300と、動作推定部300にて算出された推定動作状態量に応じて駆動センサの検出値を補正演算する補正演算部400と、を備える。
動作推定部300は、倣いベクトル指令が発せられてから倣いプローブの移動位置に反映されるまでの信号伝達特性であるノミナルモデルが設定されたノミナルモデル設定部311を有し、補正演算部400は駆動中の駆動機構が変形することによって生じる測定誤差を補正する補正量を推定動作状態量に基づいて算出する補正量算出部420と、駆動センサおよび検出センサによる検出値と補正量算出部420にて算出された補正量とを合成して測定データとする測定データ合成部430と、を備える。
(もっと読む)
形状測定装置および方法
【課題】 急傾斜面を接触式プローブにより測定すると、安定して接触力を制御することができず、高精度で高速な形状測定を行なう事ができなかった。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、接触式プローブの軸方向の変位と、接触式プローブの姿勢とを測定し、その測定結果から、接触式プローブが被測定物から受ける接触力ベクトルを計算し、接触力ベクトルの大きさが一定になるように、接触式プローブを前記接触力ベクトルと直交する方向に移動させる。
(もっと読む)
ねじ形状測定方法
【課題】一般的な三次元測定機を利用してねじ形状の各種特性値の測定を行うことができるねじ形状測定方法を提供すること。
【解決手段】測定すべきねじ形状を有するワークが装着される三次元測定機と、この三次元測定機に装着される倣いプローブと、この倣いプローブに装着されかつワークに接触される接触部を有するスタイラスとを用い、前記倣いプローブの倣い測定軸線と前記ねじ形状の中心軸線とを合わせる軸合わせ工程(処理ST4)と、前記スタイラスを前記ねじ形状に接触させつつ前記倣いプローブを前記倣い測定軸線に沿って移動させる倣い測定工程(処理ST5、ST8)と、前記倣い測定で得られた測定データから前記ねじ形状の各種特性値を演算する演算工程(処理ST7、ST9)と、を実行する。
(もっと読む)
表面センサオフセット
少なくとも第1の軸を中心に回転自在な表面センサを有する座標位置決め装置の操作方法。この方法は、表面センサを第1の角方向に置いて第1の測定結果を取得するステップと、表面センサを第2の角方向に置いて少なくとも第2の測定結果を取得するステップと、を含む。第1と第2の角方向は相互に異なり、表面センサの、その想定位置からのあらゆるオフセットは、第1と第2の測定結果に対して少なくとも部分的に反する影響を与える。この方法では、その後、第1と第2の測定結果を利用してオフセットを補正および/または設定する。  (もっと読む)
(もっと読む)
形状測定機構の異常検出方法及び形状測定機構
【課題】測定子の汚れやごみ付着か、磨耗による変形か、基準球の汚れやごみ付着か、磨耗による変形かの特定を可能として、測定子、基準球の汚れやごみ付着であればその場所の特定、測定子、基準球の磨耗であればその磨耗領域の状況の特定、あるいは、測定子、基準球の交換の必要性の判断を可能とする。
【解決手段】測定子124を被測定物102に直接接触させて、その形状測定を行う形状測定機構の異常検出に際して、前記測定子の形状を校正するための複数の基準球130a、130bを測定し、該基準球の測定により得られた、位置と大きさの共通する形状異常値と共通しない形状異常値とを判別し、該共通する形状異常値から判別される測定子の磨耗状況と汚れ又はごみ付着状況、および該共通しない形状異常値から判別される基準球の磨耗状況と汚れ又はごみ付着状況のうちの少なくともいずれか1つを知らせる。
(もっと読む)
座標測定機における動的変形による測定誤差の補正
【解決手段】測定機(1)は、測定容積内において測定センサ(3)を移動させるために座標軸線に沿って移動可能な複数の部材(8、10、12)を設けた可動ユニット(7)を備え、レーザセンサ(26)は、可動部材(8)に結び付いて、可動ユニット(7)の動的変形に関連した値を供給し、これらの値は、動的変形により生じた測定機(1)の測定誤差を補正するために処理される。 (もっと読む)
走査ヘッドの較正装置および方法
電動の関節式走査ヘッド(16)における角度測定スケールを、基準加工品(40;60;80)を用いて較正する方法が記載される。この方法は、走査ヘッド(16)に取り付けられた走査プローブ(28)などの表面検出デバイスを走査ヘッド(16)の少なくとも1軸(A1,A2)のまわりに回転させ、基準加工品(40;60;80)に対し異なる複数の角度方向に表面検出デバイスを移動させる工程を含む。次に、その異なる角度方向のそれぞれで、表面検出デバイスにより、基準加工品(40;60;80)の少なくとも1つの特性を測定する工程が実行される。そして、測定された基準加工品(40;60;80)の特性を用い、また付加的に既知または較正済みの基準加工品(40;60;80)の特性を用いて、走査ヘッドの少なくとも1つの測定スケールに対する誤差マップまたは関数を生成する。この方法は、走査ヘッド(16)を移動させるために、座標測定機械(14)などの座標位置決め機械の使用を含むことができる。基準加工品(40;60;80)は、単一の特徴部または配列された複数の特徴部(46;66)を含むことができる。 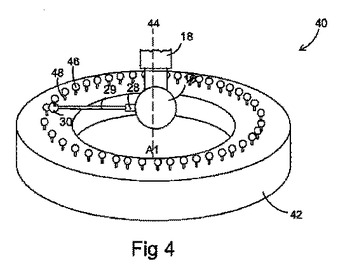 (もっと読む)
(もっと読む)
形状測定方法
【課題】スタイラスの傾きを検出する角度検出器の取付角度誤差を容易に補正する形状測定方法を提供する。
【解決手段】被測定物の測定面を第1の方向に走査して算出される接触点位置座標データと第1の方向に相反する第2の方向に走査して算出される接触点位置座標データが一致するような角度誤差推定値を角度検出器の取付角度誤差として校正して形状測定する。
(もっと読む)
形状測定装置
【課題】触針プローブと被測定物表面との摩擦抵抗による測定誤差が発生しにくい形状測定装置を提供する。
【解決手段】触針プローブ2を被測定物Sに接触させ、相対的に走査させて被測定物Sの形状を測定する形状測定装置1は、触針プローブ2の表面に設けられ、触針プローブ2と被測定物Sとの間の摩擦抵抗を軽減する抵抗減少部を備えることを特徴とする。
(もっと読む)
座標測定方法および座標測定装置
【課題】ワークピース200上の座標を測定する方法において、高い精度とプローブ150の早い移動とを合わせ備える。
【解決手段】位置決め用プラットフォーム60には、順次、ロータ100、プローブ150、針123とその先端のコンタクトボールが固定されている。針123は、回転軸65に対して角度αだけ傾斜している。結果的に、測定地点は軸65に対して距離「r」だけオフセットとなる。針123の傾斜は、適切なアクチュエータによって自由に設定して、円筒形の孔の内面206を走査するようにすることができる。プローブ150の相対位置をプローブ・エンコーダによって測定し、位置データと結合させることでワークピースの特定局部測度を得て、ワークピース200上の座標を得る。
(もっと読む)
形状測定方法及び装置
【課題】測定プローブを移動させる移動装置の基準点に対する測定プローブの測定球の位置ずれの影響を低減させ、正確な3次元座標の測定を可能にする。
【解決手段】基準球18上に設定された各格子点に対して、理論法線方向から測定プローブ15をアプローチさせて測定プローブ15の変位方向及び変位量を検出し、検出された変位方向と理論法線方向との差並びに検出された変位量と理論変位量との差を求め、これを各格子点における理論法線方向と関連付けて検出誤差データテーブルを作成する。測定プローブ15を被測定物13の基準形状に沿って移動させながら測定プローブ15の変位量及び変位方向を検出し、測定プローブ15と被測定物13の表面との摩擦が変位量に与える影響を補正するための摩擦補正量と検出誤差データテーブルとにより補正した変位量及び変位方向に基づいて、接触点の3次元座標を求める。
(もっと読む)
121 - 140 / 208
[ Back to top ]