
Fターム[2F062FF05]の内容
機械的手段の使用による測定装置 (14,257) | 走査 (1,305) | 走査方向 (1,174) | 検出部が移動するもの (846) | 三次元 (208)
Fターム[2F062FF05]に分類される特許
61 - 80 / 208
眼鏡枠形状測定装置

【課題】精度良くレンズ枠の形状を測定する。
【解決手段】針状の測定子281の移動位置を検知してレンズ枠の動径方向(XY方向)及び動径方向に垂直な方向(Z方向)の三次元形状を測定する眼鏡枠形状測定装置は、測定子281が取り付けられた測定子軸を持つ測定子保持ユニットであって、測定子281の先端方向に測定子軸を移動可能に保持し、測定子保持ユニットと、XY移動手段と、測定子の先端のXY方向を変える回転手段と、測定子のXY位置検知手段と、XY移動手段及び回転手段の駆動を制御する制御手段と、測定子保持ユニットのXY方向の位置情報、回転手段の回転情報及びXY位置検知手段の検知情報に基づいてレンズ枠FWの動径情報を求める演算手段とを備え、制御手段はレンズ枠FWの測定途中では、レンズ枠FWの測定済みの動径情報に基づいて測定子保持ユニットを移動させるXY位置を決定してXY移動手段の駆動を制御する。
(もっと読む)
スタイラス及び接触式変位センサ

【課題】被検物の表面付近まで安全に接近させることができるスタイラスを提供する。
【解決手段】先端部12を被検物Sに接触させて被検物Sの表面を追従させることにより、被検物Sの表面形状を測定するためのスタイラス10は、先端部12の先端12Aよりも前方の所定位置Pを通るように光Lを照射する発光部13と、発光部13から照射された光Lが反射された反射光L1を検知する受光部14とを備えることを特徴とする。
(もっと読む)
測定機器の支持装置
【課題】測定機器を搭載した状態で容易に移動であり、かつ安定して作業面に設置可能な測定機器の支持装置を提供する。
【解決手段】上面1Aに測定機器2が搭載され下面1Bが金属製の作業面3に載置される架台1と、架台下面からその外周面が突出可能に前記架台に設けられた複数の自在輪4と、自在輪の外周面が架台下面から突出する方向に自在輪をそれぞれ付勢する付勢手段5と、吸着面7Aが架台下面に臨んでいて、操作部6を操作することで吸着力をオン/オフ可能なマグネット吸着部7と、マグネット吸着部の吸着力がオン状態で、吸着面と作業面とが吸着状態のときに、自在輪にそれぞれかかる付勢手段からの付勢力を解除する解除部8を有する。
(もっと読む)
三次元測定機
【課題】被測定物の大きさに拘わらず、プローブの接触を確認しながら測定を実行することができる三次元測定機を提供する。
【解決手段】被測定物を載置するテーブルとプローブとを三次元方向へ相対移動させる相対移動機構13と、相対移動機構の駆動を指令する携帯可能な操作盤30と、操作盤からの指令に基づき相対移動機構を駆動させるとともに、プローブからの信号を取り込んで被測定物の形状を求める制御装置40とを備える。プローブの近傍にはカメラ20が取り付けられ、操作盤30には、表示部34と、カメラによって撮像された画像を表示部に表示する制御部38とが設けられている。
(もっと読む)
重心測定システムおよび重心測定方法
【課題】被測定物の重心位置を正確に把握することができる重心測定システムおよび重心測定方法を提供する。
【解決手段】被測定物を載置する載置台、プローブ12およびこれらを三次元方向へ相対移動させる相対移動機構13を有し、被測定物の形状を測定する三次元測定機10と、載置台の重心位置を測定する重心測定装置20と、三次元測定機の座標系と重心測定装置の座標系とを一致させるとともに、三次元測定機によって測定された被測定物の形状データに、重心測定装置で測定された重心位置を合成するデータ処理装置30とを備える。
(もっと読む)
改良された関節式アーム
関節式アームCMMは、複数の伝達部材と、少なくとも2つの伝達部材を互いに接続する複数の関節部材と、遠端における座標取得部材と、近端におけるベースとを備える。関節部材の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。 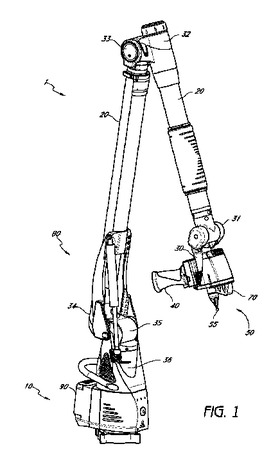 (もっと読む)
(もっと読む)
位置センサ
【課題】 例として、位置センサをATC(工具自動交換装置)機能が搭載された工作機械にて使用する場合、位置センサはコードレスで信号伝達しなければならない。従来、その信号伝達方式として採用されている電磁誘導方式には電磁コイルの取り付け位置やスペースに難があり、電波方式には混信、赤外線方式には外部悪環境によるトラブルなどがあった。
【解決手段】工作機械において、連結された構造物を浮遊媒体として微弱な交流信号を印加し、位置センサに内蔵した発信回路と工作機械に設けた受信回路を磁気結合させることで、位置センサと受信器の信号伝達をコードレスで可能とする。
(もっと読む)
座標測定機に使用するための測定プローブ
【課題】より正確な測定を可能にする新規な測定プローブを得ること。
【解決手段】座標測定機に使用するための測定プローブが、座標測定機に接続された基部1、測定チップ4、および測定チップ4の第1の端部に配置された球5を有している。測定チップ4は、基部1によって支持される少なくとも3つのリジッドな支持体2を用いてその第2の端部で支持され、それにより支持体2が球形の接続部によって測定チップに接続され、支持体2をその長さ方向に沿って基部1に対して移動させることが可能になる。支持体2は、程度にかかわらず基部1の測定チップ・ホルダ3と反対の側に突出することによって基部1を貫通すること、およびその長さ方向に沿って移動させることができるように配置されている。
(もっと読む)
測定装置
【課題】微粒子の接触体を用いて、矩形溝形状を有するマイクロマシン等の三次元形状を高精度で測定する。
【解決手段】接触体6は、可撓性の支持部材5と透明な固定部材4によってプローブ本体9に連結される。対物レンズ3にてレーザ光Gを集光させ、接触体6の底面に焦点を合わせて光放射圧によって接触体6を被測定物13の表面に接触させる。レーザ光Gを音響光学偏向器2によって偏向させることで、接触体6を任意の方向に振動させることができる。被測定物13が矩形溝形状を有する三次元構造体であっても、接触体6の振動方向を調整することで高精度な形状測定を行うことができる。
(もっと読む)
表面形状の測定方法
【課題】プローブを用いて、容易かつ高精度に被検物の表面形状を測定することができる表面形状の測定方法を提供する。
【解決手段】プローブと被検物とを相対移動させることにより、被検物の表面形状を測定する表面形状測定方法は、被検物の第1の領域の第1表面形状データを取得する第1取得工程と、第1表面形状データと少なくとも一部が重複する被検物の第2の領域の第2表面形状データを取得する第2取得工程と、第1表面形状データのうち、第2表面形状データと重複する領域のデータに対して、近似関数による当てはめを行って近似曲線を取得する近似曲線取得工程S20と、近似曲線を用いて第2表面形状データの補正量を算出する補正量算出工程S30と、算出された補正量に基づいて、第2表面形状データ全体を座標変換する座標変換工程S40と、第1表面形状データと、座標変換が行われた第2表面形状データとを統合する工程とを備える。
(もっと読む)
形状測定装置
【課題】測定対象点に測定子を確実に接触させて被測定物の形状を測定することができる形状測定装置の提供。
【解決手段】三次元測定機1は、被測定物を測定するための球状の測定子を有するプローブ21と、プローブ21を保持するとともに、プローブ21を移動させる移動機構22と、移動機構22を制御するモーションコントローラ3とを備える。モーションコントローラ3は、測定子の中心位置と、測定子の半径と、測定子の振れ量とに基づいて、被測定物の表面と、測定子との接触点の位置を算出して取得する接触点取得部33と、接触点取得部33にて取得される接触点の位置に基づいて、移動機構22にてプローブ21を移動させるための位置指令値を算出する移動指令部31とを備える。
(もっと読む)
眼鏡形状測定装置
【課題】 装置自体を大型化させず、測定誤差を発生しにくくしたり、眼鏡枠の変形防止などの複合機能を備える眼鏡形状測定装置を提供する。
【解決手段】 眼鏡枠の玉型形状を測定する眼鏡形状測定装置において、眼鏡枠に直交する第1軸線を中心に回転するとともに眼鏡枠に対峙したテーブル6に設けられ、接触子9aを径方向に移動自在に支持する接触子移動機構10とを備え、接触子移動機構は、第1軸線と直交する第2軸線を軸心とするテーブルに設置された支持軸12と、支持軸に軸着され、第1軸線、第2軸線と直交する第3軸線の方向に揺動自在となした主動アーム13と、主動アームに連結軸16を介して連結され、連結軸を軸心として第3軸線の方向に揺動自在となした従動アーム15と、従動アームに軸着され、接触子9aをテーブル6の表面から眼鏡枠に向けて突出させる接触アーム9とを有し、接触アームを眼鏡枠に接触させることを特徴とする。
(もっと読む)
機械の誤差同定方法およびプログラム
【課題】2つ以上の並進軸と1つ以上の回転軸を有する機械において、回転軸に関する幾何誤差と並進軸に関する幾何誤差とをほぼ同時に同定する。
【解決手段】回転軸であるC軸等を複数角度に割り出してターゲット球12を複数箇所に位置決めし、位置計測センサによりターゲット球12の3次元空間上の中心位置を計測し、計測された複数の中心位置計測値を円弧近似し、近似された円弧の1次もしくは2次成分等からC軸等の中心位置の誤差および傾き誤差並びに並進軸であるX軸,Y軸等の傾き誤差を算出する。
(もっと読む)
形状測定装置
【課題】容易にワークの形状測定を行うことのできる形状測定装置の提供。
【解決手段】NC加工装置1のCAD/CAM装置51は、加工情報中の測定点における加工ツール25の姿勢ベクトルが、CAD/CAMデータ中の当該点における法線ベクトルと一致した場合、加工情報中の加工ツール25のワークWに対する姿勢を、そのまま使用して測定用NCデータを形成する。加工ツール25の姿勢ベクトルがワークWの法線ベクトルと一致しない測定点があった場合、測定精度に基づいてプローブの測定姿勢に精度順位を設け、各測定点において、精度順位が高いものから優先的にワークWに対するプローブの測定姿勢を設定して測定用NCデータを形成する。優先順位が同等であるプローブの複数の測定姿勢については、各測定姿勢に到達するまでに必要とするマシニングセンター2の駆動軸27、28の移動量が少ないものを、プローブの測定姿勢データとして設定する。
(もっと読む)
手動式三次元測定装置、手動式三次元測定方法、及び手動式三次元測定用プログラム
【課題】手動式三次元測定の操作性及び正確性を向上させる。
【解決手段】手動式三次元測定装置は、被測定物2を測定する測定プローブ21と、測定プローブ21を三次元座標測定空間内において作業者が手動操作で移動させることができるように移動自在に支持する移動機構11〜13と、測定プローブ21の三次元座標空間内における位置情報を出力する位置情報出力部と、被測定物2の測定点情報を含むCAD情報を入力しこのCAD情報と測定プローブ21の位置情報とに基づいて測定プローブ21と測定点3との位置関係を逐次演算する位置演算部51と、位置演算部51の演算結果に基づいて測定プローブ21を測定点3で停止させるように移動機構11〜13による測定プローブ21の移動を規制する停止制御部53とを備える。
(もっと読む)
関節プローブヘッド
【課題】関節プローブヘッドの回転軸をロックするためのブレーキを提供する。
【解決手段】支持体に取り付くための第1のマウントと、表面検出装置が取り付け可能な第2のマウントとを備え、第2のマウントが第1のマウントに対し一以上の軸回りに回転可能である関節プローブヘッドにおいて、第1のマウントに対する第2のマウントの一以上の軸回りの位置をロックするための少なくとも一以上の機械式ブレーキが設けられ、これにより、少なくとも一つの位置測定装置が、ロック位置において、第1のマウントに対する第2のマウントの一以上の軸回りの位置を決定すべく設けられる。
(もっと読む)
アライメント調整機構、および測定装置
【課題】測定子の位置を一定に維持しつつ、プローブのアライメント調整が可能なアライメント調整機構、および測定装置を提供する。
【解決手段】アライメント調整機構10は、X軸方向に沿って平行な第一、第二調整端辺を有する調整板40と、調整板40に設けられるプローブ固定部60と、プローブ固定部60に固定されるプローブ8と、Y軸方向の移動が規制されるとともに、X軸方向に沿って平行な第一、第二基部端辺を有する補強板30と、調整板40をY軸方向に押圧するY方向調整ネジ70と、第一調整端辺および第一基部端辺、第二調整端辺および第二基部端辺を連結する調整連結部521と、を具備し、プローブ8の測定子8Cは、初期状態で、第一調整端辺および第一基部端辺を含む第一傾斜面、および第二調整端辺および第二基部端辺を含む第二傾斜面の交線上に配置される。
(もっと読む)
画像プローブの校正方法および形状測定機
【課題】画像プローブの校正方法を提供すること。
【解決手段】画像プローブ3の撮像方向を垂直にした状態で画像プローブ3および各測定子611A,611Bによりそれぞれ校正ゲージ62を測定し、画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係を求める。次に、一方の測定子611A,611Bにより基準球63を測定し、基準球63の位置を登録する。続いて、画像プローブ3の撮像方向を傾斜させた後、各測定子611A,611Bで基準球63を測定し、該測定結果と登録した基準球63の位置とから測定機1上の各測定子611A,611Bの位置を求める。画像プローブ3の光軸中心および各測定子611A,611Bの相対位置関係は既に取得しているので、求めた測定機1上の各測定子611A,611Bの位置から画像プローブ3の光軸周りの回転角度および画像プローブ3の位置を校正できる。
(もっと読む)
三次元形状測定装置用プローブ及び三次元形状測定装置
【課題】鉛直面及び水平面いずれについても小さい測定力による測定を可能とする。
【解決手段】三次元形状測定装置用プローブ1は、取付用部材2、揺動部3、連結機構、アーム取付部120、及び板バネ9A,9B、及び取付用部材2を備える。アーム取付部120にはスタイラス121が下端に配置されたアーム122が垂下して取り付けられている。アーム取付部120は板バネ9A,9Bを介して揺動部3に保持されている。揺動部3は連結機構によって水平方向に傾動可能に取付用部材2に連結されている。揺動部3の可動側磁石と取付用部材2の固定側磁石との間の磁気的吸引力によりアーム122が鉛直方向に延びる中立位置に揺動部3を復元させる復元力が作用する。鉛直面測定時の測定力は可動側磁石との間の固定側磁石の磁気的吸引力により得られる。水平面測定時の測定力は板バネ9A,9Bが鉛直方向に撓むことで得られる。
(もっと読む)
三次元測定装置
【課題】 ある点の測定後のスタイラス(測定ヘッド)のセンター(原位置)への復帰を瞬時に自動的に正確に行える三次元測定装置を提供すること。
【解決手段】 スタイラス(測定ヘッド)を原位置に復帰せしめるべくプローブユニット内に配設される、スタイラスと同軸上に延在するセンターピンと同一部材から製造されるとともにセンターピンと平行に延在する一対のストッパーピンを挟持して前記センターピンの外径と同一間隔を規定する、相対向し水平移動する一対のリミッタと、該リミッタをその背面から押圧付勢する圧縮ばねからなるセンターピンX方向復帰機構およびY方向復帰機構をZ軸方向に二層に配設したセンターピン復帰機構を有してなる三次元測定装置。
(もっと読む)
61 - 80 / 208
[ Back to top ]