
Fターム[2F065AA04]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 3次元 (2,128)
Fターム[2F065AA04]に分類される特許
141 - 160 / 2,128
検出対象物について頭部分の位置および軸部分の方向を算出する方法、装置およびプログラム
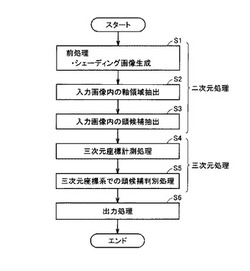
【課題】第1の径を有する軸部分と、軸部分の一端に設けられた第1の径より大きな第2の径を有する頭部分とを含む検出対象物について、頭部分の位置および軸部分の方向をより高速に算出する方法、装置およびプログラムを提供する。
【解決手段】本方法は、少なくとも1つの検出対象物を撮像した入力画像を取得するステップと、入力画像から、軸部分に相当する領域を軸領域として抽出するステップと、入力画像内の明るさの変化から頭部分の候補位置を抽出するステップと、軸領域および候補位置についての高さ情報を取得するステップと、軸領域との間の相対的な位置関係から、軸領域に対応する検出対象物の頭部分に相当する位置を候補位置から抽出するステップとを含む。
(もっと読む)
眼鏡用測定装置及び三次元測定装置

【課題】 被検者に負荷をかけることなく角膜眼鏡間距離等の測定を行う眼鏡用測定装置を提供する。
【解決手段】 眼鏡用測定装置(10)は、指標マーク(SC)が眼鏡フレーム(23)に取り付けられた眼鏡(20)をかけた被検者を撮影する撮影部(12)と、撮影部で撮影された被検者の眼球の頂点を求めるとともに、指標マーク(SC)に基づいて眼鏡の眼鏡レンズ(21)と被検者の眼球の頂点(KP)との角膜眼鏡間距離(KG)を演算する演算部(14)と、を備える。
(もっと読む)
移動環境認識装置及び方法
【課題】高速、且つ高精度に測定対象の形状認識情報を得ることができる移動環境認識装置を提供する。
【解決手段】測定対象7に対して円錐走査を行う円錐走査手段1を備えている。円錐走査手段は、移動環境検出器3と、この移動環境検出器で計測した情報を加工する外界認識装置9を備えている。この外界認識装置は、円錐走査手段の測定データに基づいて前記測定対象の傾斜角、傾斜方向及び測定対象中心までの距離を算出する移動環境検出手段と、この移動環境検出手段が算出した前記測定対象の算出データに基づき、各測定対象の面形状を判断する面形状判断手段と、この面形状判断手段が水平面と判断した所定の測定対象の形状を認識する形状認識手段とを備えている。
(もっと読む)
測定装置
【課題】被測定面の形状を高精度に測定することができる技術を提供する。
【解決手段】被測定面の形状を測定する測定装置であって、前記被測定面に接触する接触部材を含むプローブを保持するプローブハウジングと、前記被測定面に対する位置及び姿勢が固定され、前記被測定面の形状を測定するための基準となる基準ミラーと、前記基準ミラーと前記プローブとの間の第1距離を測定する第1距離測定部と、前記プローブハウジングと前記プローブとの間の第2距離を測定する第2距離測定部と、前記第2距離測定部で測定される前記第2距離が一定距離となるように前記プローブハウジングを駆動させながら前記第1距離測定部で測定される前記第1距離から前記接触部材の位置を特定し、当該接触部材の位置に基づいて前記被測定面の形状を算出する処理部と、を有する。
(もっと読む)
情報取得装置、投射装置および物体検出装置
【課題】検出対象物が近距離にある場合においても、大きな目標物の距離情報を取得できる情報取得装置、投射装置および物体検出装置を提供する。
【解決手段】投射光学系11は、レーザ光源111と、コリメータレンズ112と、レーザ光を分離させるハーフミラー113と、分離されたレーザ光をドットパターン光Dp1に変換して目標領域に投射するDOE114と、分離されたレーザ光をドットパターン光Dp2に変換して目標領域に投射するDOE115と、を備える。複数のDOE114、115を用いることにより、広い角度範囲で、目標領域にドットパターンを照射できる。これにより、情報取得装置は、検出対象物が近距離にあるような場合においても、検出対象物の距離情報を適正に取得することができる。
(もっと読む)
測定補助器具およびそれを用いた直径測定方法
【課題】 円環状の測定対象物に対してレーザトラッカーから見て反対側の周面の空間座標を測定することを可能にし、測定時の取扱いが簡単で、一人でも容易に直径を測定することができる測定補助器具を提供する。
【解決手段】 測定補助器具20は、ターゲットTgが設置されるターゲット設置部21と、ターゲット設置部21を測定対象物Wの円周方向に移動させる移動機構部22とを備える。移動機構部22は、測定対象物Wの測定対象周面である外周面Waに転接する第1の周面接触部材26と、測定対象物Wの内周面Wbに転接する第2の周面接触部材27と、測定対象物Wの上端面Wcに転接する端面接触部材28とを有する。第1の周面接触部材26は、ターゲット設置部21の中心を通る鉛直方向の軸O1回りに回転自在である。第1または第2の周面接触部材26,27を回転させる移動用回転駆動源41を設ける。
(もっと読む)
基板検査装置、基板検査方法及び該基板検査装置の調整方法
【課題】貼り合わせた2つの基板層のいずれかに検査光の透過しない部分があっても、貼り合わせ界面に発生し得る微小空洞を検査することのできる基板検査装置を提供することである。
【解決手段】基板100の表面に対して斜めに入射するように検査光を帯状に照射する光源ユニット30と、前記検査光により前記基板の表面に形成される帯状照明領域を挟んで光源ユニット30と逆側の所定位置に配置されるラインセンサカメラ20とを有し、照明ユニット30及びラインセンサカメラ20と基板100とが相対移動している際にラインセンサカメラ20から出力される映像信号に基づいて基板画像情報を生成し、基板画像情報に基づいて基板100の第1基板層101と第2基板層102との界面に生じ得る微小空洞についての検査結果情報を生成する構成となる。
(もっと読む)
車両周辺監視装置
【課題】車両周辺監視装置において、実寸と相関性の高いテンプレートサイズを設定することができ、その結果、良好な画像処理結果を得ることができ、また、不必要に大きいテンプレートサイズを設定することがないため、計算量の増加を防ぐことにある。
【解決手段】制御手段(4)は、各実空間座標位置に予め設定された3次元寸法の仮想ブロックを想定し、この仮想ブロックが画像上に表示されるサイズを記憶する記憶手段(6)と、この記憶手段(6)に記憶された表示サイズから一つの画素の周辺画素を一群のデータとして画像処理を行うためのテンプレートサイズを設定するテンプレートサイズ設定手段(7)と、このテンプレートサイズ設定手段(7)により設定されたテンプレートサイズを用いて撮像手段(3)により撮像された画像を処理する画像処理手段(8)とを備える。
(もっと読む)
簡易式運動モニター装置
【課題】 市販の各種訓練機器に簡単に設置でき、簡単な操作で、訓練対象者のリハビリ進捗状況を客観的に評価し、リハビリの進捗状況に応じた最適な訓練を、最適なタイミング、頻度で行えるようにする。
【解決手段】 訓練対象者に、所定の動作を行わせる市販の訓練機器に、訓練開始時に押圧されるタッチセンサと、訓練対象者が各動作に対応した位置に到達したこと、及びこの位置から離れたことをそれぞれ検出するセンサを設置する。そして、タッチセンサが押圧されてから訓練対象者が各動作に対応した位置に達するのに要した時間、訓練対象者が各動作に対応した所定位置に達してから離れるのに要した時間をそれぞれ検出し、各所要時間を記憶する。コンピュータに搭載されたプログラムにより、各所要時間に基づいて各動作を評価し、その評価結果や次のステップのリハビリへの移行を促すようにする。
(もっと読む)
パターン形成装置及びパターン形成方法、移動体駆動システム及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】パターンが形成される物体を保持する移動体を安定して位置制御する。
【解決手段】露光装置は、ウエハを保持して所定平面内で移動するウエハステージと、所定平面内でウエハステージとは独立に移動する計測ステージと、計測ステージの位置情報を計測する干渉計システム118と、ウエハステージの位置情報を計測する、干渉計システム118に比べて計測値の短期安定性が優れるエンコーダシステム(70A〜70F)と、を備えている。このため、露光装置によると、干渉計システム118により計測ステージの位置情報が計測され、エンコーダシステム(70A〜70F)によってウエハステージWSTの位置情報が計測される。従って、パターンが形成されるウエハを保持するウエハステージを安定して位置制御することが可能となる。
(もっと読む)
光学式プローブ
【課題】光学系に可動機構を備えることなく、測定対象物の形状を逐次測定することが可能な光学式プローブを提供する。
【解決手段】レーザ光を出射するレーザ光源と、レーザ光源により出射されたレーザ光を平行光とするコリメータレンズと、コリメータレンズにより平行光とされたレーザ光をライン形状の光に変形する光形状変形手段と、光形状変形手段により変形されたライン形状の光を測定対象物に対して選択的に照射させる光照射手段と、光照射手段により選択的に照射されて測定対象物の表面にて反射されたレーザ光に基づいて測定対象物の画像を撮像する撮像手段と、光照射手段によるライン形状の光の照射を制御する制御手段と、を備え、制御手段は、光照射手段において、ライン形状の光の一端部から他端部まで所定の範囲ずつ順次光を照射させる。
(もっと読む)
三次元点群位置データ処理装置、三次元点群位置データ処理方法、三次元点群位置データ処理システムおよびプログラム
【課題】三次元点群位置データの処理の途中経過を知ることができる技術を提供する。
【解決手段】三次元レーザースキャナが測定した三次元点群位置データ(S502)に基づき、解像度を段階的に変えた三次元モデルを作成する(S505)。この際、低解像度の三次元モデルの作成およびその表示(S506)、さらにその後に、ラベリングされたデータを引き継いで(S509)の高解像度の三次元モデルの作成およびその表示を行う。ここで、低解像度の三次元モデルの表示を行うことで、最終的な三次元モデルの完成の途中の段階をユーザが把握することができる。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法
【課題】 従来の2次元画像と距離画像を併用した場合の位置姿勢計測手法に比べて、複雑背景下であっても高速かつロバストに位置姿勢を計測すること。
【解決手段】 2次元画像対応探索部140は、撮像画像中における仮想物体の幾何特徴と、撮像画像中に映っている現実物体において該幾何特徴に対応する特徴部分と、の対応付けを行う。対応探索領域設定部150は、仮想物体を構成するそれぞれの図形を距離画像上に投影し、該投影された図形の領域から、特徴部分に対応する距離画像内の部分の周辺を省いた残りの領域を、対応探索領域として設定する。位置姿勢算出部170は対応探索領域内の画素の奥行き値が示す位置と該画素に対応する仮想物体上の位置との3次元空間における距離、幾何特徴と特徴部分との3次元空間における距離、を表す評価関数を最小化するように位置姿勢情報を繰り返し更新する。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】受光素子が指向性を有している場合でも、検出範囲を広く設定することのできる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置において、受光部13は、受光素子130と、受光素子130に対する反射光L3の入射角度範囲を狭める入射角変換部14とを備え、入射角変換部14は、入射部148、第1反射面141、第2反射面142、および第3反射面143を備えた入射角変換用導光路140を有している。このため、対象物体Obで反射した検出光L2(反射光L3)は、入射部148から入射した後、第1反射面141と第2反射面142との間で反射を繰り返しながらXY平面に沿って第1反射面141と第2反射面142との間で進行し、その後、第3反射面143でZ軸方向に反射して、受光素子130の受光面131に入射する。このため、受光面131に対する入射角度が狭い。
(もっと読む)
道路勾配推定装置及びプログラム
【課題】先行車や車線境界線等の特定物体が存在しない場合でも、前方道路の勾配を精度良く推定する。
【解決手段】路面反射点抽出部22で、レーザレーダ12の観測データから路面反射点を抽出し、第1の立体物候補抽出部24で、残りの点群から第1の立体物候補を抽出する。また、第2の立体物候補抽出部26で、撮像画像から垂直エッジの検出またはパターン認識により第2の立体物候補を抽出し、路面接地点算出部28で、撮像画像上の第2の立体物候補から路面接地点を検出し、その第2の立体物候補に対応する第1の立体物候補の距離情報を用いて、路面接地点の3次元位置を算出する。道路勾配推定部30で、路面接地点算出部28で算出された路面接地点の3次元位置、及び路面反射点抽出部22で抽出された路面反射点の3次元位置を、自車両を中心とする3次元座標空間にプロットして、路面モデルをフィッティングして道路形状を推定する。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム
【課題】検出部を被検物に対して移動させて測定位置毎に停止させて測定する場合の測定速度を向上させることができる形状測定装置を提供する。
【解決手段】形状測定装置は、被検物に対しての相対位置が変更されて被検物の表面の形状を検出する検出部(20)と、検出部により検出された被検物の表面の形状の変位を示す情報に基づいて、被検物に対して検出部が相対的に静止しているか否かを判定する判定部(静止判定部58)と、判定部により検出部が相対的に静止していると判定された場合の形状に基づいて、被検物の表面の形状データを算出する算出部(座標算出部53)と、を備える。
(もっと読む)
光学式位置検出装置
【課題】対象物体が検出用光源を配置した領域の外側に位置しても内側に位置しても対象物体の位置を検出できる光学式位置検出装置を提供する。
【解決手段】光学式位置検出装置10において、検出用光源部12が検出光L2を射出した際に対象物体Obで反射した検出光を光検出部30で検出して対象物体Obの座標を検出する。検出空間10Rからみたときに、光検出部30は、複数の検出用光源部12より内側に位置するとともに、複数の検出用光源部12は各々、第1の発光素子12A1〜12D1と第2の発光素子12A2〜12D2とを備えている。従って、第1の発光素子12A1〜12D1が点灯した際の光検出部30での受光強度と第2の発光素子12A2〜12D2が点灯した際の光検出部30での受光強度との比較結果に基づいて対象物体Obが検出用光源部12より外側に位置しても内側に位置しても対象物体Obの位置を検出することができる。
(もっと読む)
三次元モデリング装置、三次元モデリング方法、ならびに、プログラム
【課題】精度良く三次元モデルを作成する。
【解決手段】画像受付部11は、被写体を異なる角度から複数回撮像することにより得られる複数の画像の組の入力を受け付ける。三次元モデル生成部12は、受け付けられた複数の画像の組のそれぞれに基づいて、被写体の三次元モデルを複数生成する。三次元モデル選択部13は、被合成三次元モデルと合成三次元モデルとを選択する。特徴点抽出部14は、被合成三次元モデルと合成三次元モデルから、複数の第1特徴点と第2特徴点を抽出する。特徴点選択部15は、抽出された複数の第1特徴点と第2特徴点の中から、ステレオカメラ1との距離が近い特徴点を優先的に選択する。座標変換パラメータ取得部16は、座標変換パラメータを取得する。座標変換部17は、合成三次元モデルの座標を被合成三次元モデルの座標系の座標に変換する。三次元モデル合成部18は、合成三次元モデルを被合成三次元モデルに合成する。
(もっと読む)
展開図生成装置、展開図生成方法及び展開図表示方法
【課題】トンネルの壁面がどの程度の高さの凹凸を持つかを知ることが可能な技術を提供することを目的とする。
【解決手段】展開図生成装置は、記憶装置1と、変換装置2と、照合装置3と、変位形状生成装置4と、描画装置5とを備える。変換装置2は、壁面42の複数の計測点7を壁面42の展開図に配置する座標変換を行う。変位形状生成装置4は、座標変換された複数の計測点7の座標に基づいて、壁面42の展開平面17に、当該展開平面17に直交する方向の座標wの値を反映した凹凸形状が付与されてなる変位形状41を生成する。描画手段5は、変位形状41に、画像9のパターンを描画する。
(もっと読む)
141 - 160 / 2,128
[ Back to top ]