
Fターム[2F065AA04]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 3次元 (2,128)
Fターム[2F065AA04]に分類される特許
81 - 100 / 2,128
車両用ミラー制御装置
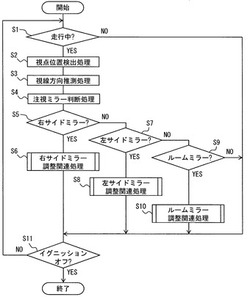
【課題】車両用ミラーの鏡面角度をドライバにとって好適な角度に自動的に調整しながらも、乗員にとっての快適性を損ない難くすることを可能にする。
【解決手段】車両が走行中と判定した場合であって、且つ、いずれかの車両用ミラーをドライバが見ていると判断した場合には、ドライバが見ている車両用ミラーであると判断した車両用ミラーの最適角度を算出し、その算出結果に基づいて当該車両用ミラーについてのみ鏡面角度の調整を行う一方、車両が走行中でないと判定した場合、若しくは車両が走行中と判定した場合であって、且つ、いずれの車両用ミラーもドライバが見ていると判断しなかった場合には、車両用ミラーの鏡面角度の調整を行わない。
(もっと読む)
振動計測装置および振動計測方法

【課題】振動の測定および解析を容易に行うことができるようにする。
【解決手段】高速度カメラ4の撮像部4aは、ケーブル10の各実測点に設けられたマーカーシール5が正反射する光を撮像する。高速度カメラ4の計算処理部4bは、撮像部4aによる撮像と並行して、撮像部4aが撮像した画像毎に各実測点の座標を求める。高速度カメラ4のメモリ4cは、各実測点の座標に係るデータを記憶する。コンピュータ6は、メモリ4cに記憶された各実測点の座標に係るデータを用いてケーブル10の振動分析を行う。
(もっと読む)
画像処理方法、ステレオカメラシステム
【課題】より短い処理時間で距離情報が得られる画像処理方法を提供すること。
【解決手段】第1の画像と第2の画像を撮影するステップと、加算手段241が、第1の画像の第1の合計値、及び、第2の画像の第2の合計値を算出する合計値算出ステップと、シフト手段242が記第1の合計値を所定ビット数、右にシフトして第1の近似平均値を算出し、同様に第2の近似平均値を算出する近似平均値算出ステップと、整数倍手段243,244が、第1の画像と第2の画像の小領域内の各画素データの値を整数倍する整数倍ステップと、相関値算出手段249が、該画素データの値を整数倍した値から第1の近似平均値を引いた第1のデータと、画素データを整数倍した値から第2の近似平均値を引いた第2のデータをそれぞれ求め、画素データ毎に前記第1のデータと第2のデータとの差分の二乗和を算出する相関値算出ステップと、を有する画像処理方法を提供する。
(もっと読む)
撮像装置
【課題】 被写体をステレオ撮影時にズーム調整が可能であり、撮影したステレオ画像から被写体の3次元位置情報を高精度で取得できる撮像装置を実現する。
【解決手段】 被写体を第1の方向から撮像する第1の撮像手段と、被写体を第1の方向とは異なる第2の方向から撮像する第2の撮像手段とを備え、第1の撮像手段により撮像された第1の画像と、第2の撮像手段により撮像された第2の画像を用いて、被写体の3次元位置情報を取得する撮像装置であって、撮像装置は、第1の画像および第2の画像をズーム調整して結像させるズーム光学系を有し、ズーム光学系は、焦点距離を検出する焦点距離検出手段を有することを特徴とする。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
変位測定装置及び光無線通信システム
【課題】光無線通信システムのトラッキング機構の小型化、測定精度向上等を実現する。
【解決手段】送信ユニット11に2つの距離センサ14,15を設け、受信ユニット21に位置指標部23と基準高さ部24を設ける。位置指標部23は、複数のエリアに区画され且つ各エリア毎に高さが異なる三次元形状に形成され、基準高さ部24を基準とした各エリアの高さとエリア位置との関係を変位測定テーブルデータとして記憶する。各距離センサ14,15によって位置指標部23の1つのエリアまでの距離と基準高さ部24までの距離をそれぞれ測定し、これら2つの距離測定値の差分と変位測定テーブルデータとに基づいて位置指標部23のうちの第1の距離センサ14で測定したエリア位置を特定することで、受信ユニット21の変位量及び変位方向を判定し、その判定結果に基づいて送信部12と受信部22との光軸ずれを補正するように光軸ずれ補正機能を作動させる。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、並びに計測方法
【課題】計測対象面の凹凸に起因する面位置センサの計測誤差の補正データを作成し、該補正データを用いて計測精度が改善される面位置センサを用いて、移動体を高精度に2次元駆動する。
【解決手段】 X干渉計127、Y干渉計16を用いて位置を監視しながらウエハステージWSTを移動させ、センサ72a〜72dを用いてウエハステージ上面に設けられたYスケール39Y1,39Y2のZ位置を計測する。ここで、例えば、2つの面位置センサ72a,72bの計測結果の差より、Yスケール39Y2のY軸方向の傾きが得られる。Yスケール39Y1,39Y2の全面について傾きを計測することにより、それらの2次元凹凸データが作成される。この凹凸データを用いてセンサの計測結果を補正し、該補正済みの計測結果を用いることにより、高精度にウエハステージを2次元駆動することが可能になる。
(もっと読む)
画像ベースの位置決定
【課題】プラットフォームの位置を識別するための方法および装置を提供する。
【解決手段】プラットフォームが動いている間、プラットフォームに関連するカメラシステムによって生成された一連の画像内の特徴が識別される。カメラシステムのパースペクティブの移動が、一連の画像内の特徴の位置の移動から識別される。プラットフォームの位置の変化が、パースペクティブの移動に基づいて識別される。
(もっと読む)
計測装置、情報処理装置、計測方法、情報処理方法、および、プログラム
【課題】 三次元位置計測において、投影パターンのパターン形状を適切に設定することを目的とする。
【解決手段】 計測対象に対してパターン光を投影する投影手段と、前記パターン光が投影された前記計測対象を撮影し、前記計測対象の撮影画像を取得する撮影手段と、前記撮影画像と、前記投影手段の位置および姿勢と、前記撮影手段の位置および姿勢とに基づいて、前記計測対象の位置および/または姿勢を計測する計測手段と、前記計測対象の位置および/または姿勢の変動範囲に基づいて、以降に投影される前記パターン光のパターン形状を変更する変更手段と、を有することを特徴とする。
(もっと読む)
情報処理装置及び情報処理方法
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
接合継ぎ目を監視する光学測定装置、ならびに同測定装置を備える接合ヘッド及びレーザ溶接ヘッド
【課題】ワークピース内の接合領域を監視する光学測定装置を提供する。
【解決手段】光学測定装置100は、接合対象であるワークピース16の方向に光扇22を投射して、前記接合対象であるワークピースの接合領域10内に、その接合領域内の接合継ぎ目14と交差する三角測量光ライン24を生成するのに適した第1光源20を備える少なくとも一つの光切断装置18と、前記接合対象であるワークピースの接合領域を均一に照光する第2光源28を備える照光装置26と、接合継ぎ目上に投影された三角測量光ラインの空間分解画像を生成する、第1測定ビーム経路32を有する第1光センサ30と、接合継ぎ目の空間分解画像を生成する、第2測定ビーム経路36を有する第2光センサ34とを含み、第2測定ビーム経路は、第1測定ビーム経路内に同軸結合され、第1光センサの読み取り速度は1kHzを上回り、第2光センサの読み取り速度は500Hz未満である。
(もっと読む)
ワーク接触点補正システムおよび旋盤
【課題】簡単かつ高精度に、ワークの被接触面に対するワーク接触部材の接触点の位置を補正できるワーク接触点補正システムおよび旋盤を提供することを課題とする。
【解決手段】ワーク接触点補正システム2は、ワークWの被接触面W1の形状に沿って、該被接触面W1に対する接触点が変化するワーク接触部材21と、ワーク接触部材21を撮像する撮像装置24と、撮像装置24が撮像した画像からワーク接触部材21の外形線に関する実測データR1を取得し、実測データR1を基に接触点の位置を補正する演算部220aを有する制御装置22と、を備えることを特徴とする。
(もっと読む)
車両検出装置
【課題】複数の映像間で対応をとる特徴点を定めて位置合わせ基準を鮮明にでき、車両の検出精度を向上させる。
【解決手段】実施形態の車両検出装置は、線分成分抽出手段、多角形近似手段及び計測手段を備えている。前記線分成分抽出手段は、左右の撮影画像毎に、当該撮影画像に含まれる前記車両のフロントガラス領域と車体との境界を示す複数の線分成分を抽出する。前記多角形近似手段は、前記左右の撮影画像毎に、当該抽出された複数の線分成分の幾つかを用いて閉ループを構成する多角形近似を行う。前記計測手段は、前記左右の撮影画像毎に前記閉ループを構成する線分成分を当該左右の撮影画像間で互いに位置合わせし、当該位置合わせした線分成分間の座標情報と、左右の撮影画像を撮影した撮影位置を示す撮影位置情報とに基づいて、前記閉ループの位置を前記車両の位置として計測する。
(もっと読む)
情報処理装置及び情報処理方法
【課題】撮像装置と計測対象物体との関係が高速に変化している場合であっても、物体の位置及び姿勢の計測を精度良く行えるようにする。
【解決手段】2次元画像及び距離画像が撮像可能な撮像装置20、30により、被測定物体の3次元的な位置姿勢を推定する情報処理装置1であって、被測定物体の位置姿勢推定用照合データを保存する位置姿勢推定用照合データ保存手段110と、撮像装置が第1の位置姿勢において撮影した2次元画像を入力する2次元画像入力手段120と、撮像装置が第2の位置姿勢において撮像した距離画像を入力する距離画像入力手段130と、第1の位置姿勢と第2の位置姿勢の相対位置姿勢情報である位置姿勢差分情報を取得する相対位置姿勢情報入力手段と、位置姿勢差分情報に基づき、2次元画像及び距離画像に対して、位置姿勢推定用照合データが当てはまるように被測定物体の位置姿勢を算出する位置姿勢推定手段160とを設ける。
(もっと読む)
計測装置および情報処理装置
【課題】 三次元位置計測において、投影パターンのパターン形状を適切に設定することを目的とする。
【解決手段】 計測対象に対してパターン光を投影する投影手段と、前記パターン光が投影された前記計測対象を撮影し、前記計測対象の撮影画像を取得する撮影手段と、前記撮影画像と、前記投影手段の位置および姿勢と、前記撮影手段の位置および姿勢とに基づいて、前記計測対象の位置および/または姿勢を計測する計測手段と、前記計測対象の位置および/または姿勢の変動範囲から、前記パターン光の識別分解能を設定する設定手段と、前記識別分解能に応じて、前記パターン光のパターン形状を変更する変更手段と、を有することを特徴とする。
(もっと読む)
キャリブレーション装置及び歪み誤差算出方法
【課題】撮影画像内の周辺部において生じる歪み誤差を補正できる、キャリブレーション装置及びキャリブレーション方法を提供すること。
【解決手段】キャリブレーション装置100において、特徴点設定部110が、周期性を持って全体に配列された特徴点群が含まれたキャリブレーションボードがステレオカメラによって撮影されたボード画像内の画像内特徴点群の内から、設定ポイントが密に且つボード画像の中央部領域にのみ配置された第1パターン及び設定ポイントが疎に且つボード画像の全体に配置された第2パターンに基づいて、第1の画像内特徴点群セット及び第2の画像内特徴点群セットを設定する。誤差補正情報生成部130が、第1の画像内特徴点群セットに含まれた各画像内特徴点の座標と、第2の画像内特徴点群セットに含まれた各画像内特徴点の座標と、キャリブレーションパラメータとに基づいて、歪み誤差を算出する。
(もっと読む)
貨物自動車寸法測定装置、及び貨物自動車寸法測定方法
【目的】カメラやレーザー等の光学系手段を用いて測定効率の向上に貢献する手段を利用しつつ、さらに測定精度が高く、貨物自動車に関する的確なデータ管理が可能な貨物自動車寸法の測定装置及び測定方法とする。
【構成】貨物自動車の製造施設において、反射部を有するターゲット部と、所定位置に固定でターゲット部に反射される光を出力する複数の光学系手段と、反射光でターゲット部の座標位置を決定して貨物自動車の寸法を算定する制御部がある。ターゲット部の一部は、貨物自動車後方の灯火部に取り付けられている。光学系手段は、灯火部用のターゲット部に光を出力する灯火部用光学系手段を含む。ターゲット部の反射光データは制御部に入力され、貨物自動車の全長、全幅又は全高の少なくとも一つが算定され、灯火部用光学系手段の撮影データに基づいて灯火部の取り付け位置が算定される。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、デバイス製造方法、計測方法、並びに位置計測システム
【課題】面位置センサの設置位置を計測し、該計測された設置位置に基づいて面位置センサを用いて移動体の2次元移動面の垂直方向と傾斜方向の位置座標を計測することにより、移動体を安定かつ高精度に駆動する。
【解決手段】 干渉計システムを用いてウエハステージWSTのXY位置を監視しながらウエハステージを移動させて、面位置センサ72k,74i,76jを用いてYスケール39Y3,39Y4を、X軸方向及びY軸方向に走査することにより、面位置センサのXY設置位置を計測する。得られた設置位置情報に基づいて、面位置センサを用いて、ウエハステージのXY平面(移動面)に対する垂直方向と傾斜方向の位置座標を計測することにより、ウエハステージを安定かつ高精度に駆動する。
(もっと読む)
遊戯板の障害釘の高さ検査装置および検査方法と遊戯盤
【課題】遊戯盤に植設される釘は植設される位置、および高さが所定の範囲内でなければならない。しかし、所定の高さより高い釘を見つける方法は、すでに開示されているが、所定の高さより低い釘を高速にしかも釘にダメージを与えることなく見つけるのに、適した方法はなかった。
【解決手段】前記遊戯盤を所定の速度で搬送する移送手段と、前記遊戯盤の垂直方向に視軸が配置された第1のラインセンサと、視軸が前記第1のラインセンサの視軸から所定の角度傾き、かつ前記視軸が前記第1のラインセンサの視軸と交わる交線が、前記遊戯盤の前記釘の頭と同じ高さに配置される第2のラインセンサと、前記釘の頭を前記第1のラインセンサが撮影した地点と前記第2のラインセンサが撮影した地点の間の距離に基づいて、前記釘の高さを算出する制御装置を有する検出する検査装置。
(もっと読む)
車軸検出装置
【課題】車軸検出装置における車軸の検出精度を向上させる。
【解決手段】車両進行方向に対して垂直方向に被写体に対して赤外線を照射する赤外線照射部(101a〜101d)と、前記被写体からの反射光をそれぞれ受光して被写体像を取得する画像取得部(104a、104b)と、取得された複数の被写体像に基づいて、前記被写体までの距離を演算する距離演算部(107)と、被写体に車両が含まれない場合の該被写体までの距離を記憶する距離データ記憶部(109)と、演算された前記被写体までの距離と記憶された距離との比較結果に基づいて車軸を検出する車軸判別部(110)と、を具備し、距離データ記憶部(109)は、前記被写体に車両が含まれない場合で演算された前記被写体までの距離の信頼性が所定条件を満足する場合、前記演算された距離に記憶内容を更新する。
(もっと読む)
81 - 100 / 2,128
[ Back to top ]