
Fターム[2F065AA04]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 3次元 (2,128)
Fターム[2F065AA04]に分類される特許
41 - 60 / 2,128
三次元測定対象物の形態調査方法
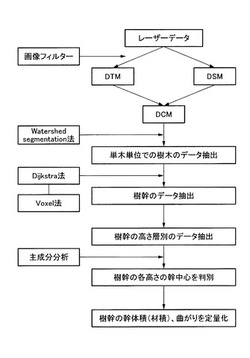
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
光学的位置検出装置

【課題】対象物体の2次元的な位置を1台の装置で光学的に検出することは困難であること。
【解決手段】光学的位置検出装置は、光を照射する光照射部と、対象物体からの反射光を受光する受光部とを有する。受光部は、受光面が2次元に分割された分割フォトダイオードと、対象物体からの反射光を集光し分割フォトダイオードの受光面に対象物体の像を結像する受光レンズと、分割フォトダイオードの分割された受光面の各々に対応するフォトダイオードの出力信号電流に基づいて、受光レンズの光軸と直交する2次元方向における対象物体の位置を検出する演算部とを有する。
(もっと読む)
コークス炉の炉壁診断方法およびコークス炉の炉壁補修方法
【課題】老朽化したコークス炉における炭化室の炉壁の変形状態(壁面の凹凸、窯幅の変化)を、炭化室内部に測定装置を入れることなく、炭化室外部から簡便に精度良く測定することができるコークス炉の炉壁診断方法およびコークス炉の炉壁補修方法を提供する。
【解決手段】炭化室10の外側にレーザー式3次元形状測定装置20を配置し、レーザー式3次元形状測定装置20によって、蓋12をとった状態の窯口11から斜めにレーザー21を照射して、炉壁(壁面)13の形状を点群として測定する工程を、炭化室10の左右の壁面13a、13bに対して独立して実施した後、左右を独立して測定した壁面の形状を、炭化室10周辺の基準物22を元に合成して、一つの形状データ(点群)にまとめて左右合成炉壁形状とし、その左右合成炉壁形状から左右の壁面間の距離(窯幅)を計算して、炉壁形状(壁面の凹凸、窯幅の変化)の診断を行う。
(もっと読む)
視線分析装置、視線計測システム、方法、プログラム、記録媒体
【課題】本発明の課題は、被験者の視線を推定・追跡することで、評価対象印刷物の掲載情報または陳列棚の商品の注目度を分析評価するシステムを提供することである。
【解決手段】
メガネを通して見るシーン画像とシーン画像上の注視点座標を視線分析装置に送信する視線追跡メガネと、基準画像および基準画像の分割画像の、特徴点の座標と特徴量を記憶する手段と、視線追跡メガネからシーン画像と注視点座標を受信する手段と、シーン画像の特徴点の特徴量と分割画像の特徴点の特徴量とに基づき最も類似度評価の高い特徴点を組み合せる手段と、最も多い組合せ個数を持つ分割画像の特徴点の座標とシーン画像の特徴点の座標に基づいて座標変換行列を算出する手段と、座標変換行列とシーン画像上の注視点座標から算出した分割画像上の注視点座標を、基準画像に変換して注視点マークを合成する手段と、を備える視線分析装置と、特徴とする視線計測システムである。
(もっと読む)
3次元座標位置推定装置、その方法、そのプログラムおよび3次元座標推定システム、ならびに、カメラ較正情報生成装置
【課題】マーカを複数のカメラで撮影したそれぞれの画像からマーカの3次元座標位置を推定する3次元座標位置推定装置を提供する。
【解決手段】3次元座標位置推定装置1は、少なくとも30台以上のカメラによって撮影されたカメラ画像を入力する画像入力手段11と、カメラごとに、カメラ画像からマーカの2次元座標位置を検出する点光源(マーカ)検出手段12と、カメラパラメータに基づいて、全カメラ共通の座標系において、カメラごとに、点光源(マーカ)検出手段12で検出された2次元座標位置と、当該カメラの光学中心とを結ぶ直線式を算出する点光源(マーカ)方向算出手段13と、カメラごとの直線式との距離の総和が最小となる位置を、マーカの3次元座標位置として算出する距離最小位置算出手段14と、を備えることを特徴とする。
(もっと読む)
バリ取り方法
【課題】より適切なバリ取りを行うことができるバリ取り方法を提供する。
【解決手段】バリ取り方法は、ワーク上のバリの形状を計測する計測工程(S1、S2)と、計測工程で得られた計測値に基づき、バリの長さ方向に沿って所定の根元算出点における両側の根元位置を算出する根元算出工程(S3〜S11)と、根元算出工程で得られた根元位置に基づいてバリ取り工具の軌道を算出する軌道算出工程と、軌道算出工程で得られた軌道に従ってバリ取り工具を移動させながらバリ取り加工を行うバリ取り工程とを備える。
(もっと読む)
計測装置
【課題】簡易な構成で広い計測レンジと高い計測精度とを実現した計測装置を提供する。
【解決手段】計測装置は、第1光源、第2光源、第1検出器、第2検出器及び算出部を備える。第1光源は第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する。第2光源は第3波長の第2光を生成する。第1検出器は第1光を参照面及び被検面に各々照射することで生成された第1干渉縞を検出する。第2検出器は第2光を参照面及び被検面に各々照射することで生成された第2干渉縞を検出する。第3波長は第1波長及び第2波長の合成波長より短い。算出部は第1時刻において第2干渉縞の位相のデータから第2干渉縞の次数が算出できなくなった場合に、第1時刻より後の走査区間における第1干渉縞の位相の変化に基づいて第1時刻以降における第2干渉縞の次数を算出し、該算出された第2干渉縞の次数を用いて第1時刻以降における被検面の形状を算出する。
(もっと読む)
フレーム部材用検査治具、フレーム部材用検査装置及びフレーム部材用検査方法
【課題】廉価な測定装置を使用するとともに、測定方向が異なる種々の被検査部位を、同一方向から容易且つ正確に測定することを可能にする。
【解決手段】フレーム部材用検査装置10は、フレーム部材12に設けられる被検査部位の位置を測定し、前記測定された位置の精度を検査する。この検査装置10は、フレーム部材12を所定の姿勢に保持する保持機構50と、前記フレーム部材12の被検査部位に直接装着されるとともに、前記被検査部位に対応し且つ前記フレーム部材12の横方向に向かう計測孔部86が設けられる検査治具52と、前記計測孔部86を測定して算出される該計測孔部86の位置情報に基づいて、前記被検査部位の位置精度を検出する測定機構56L、56Rとを備えている。
(もっと読む)
対象物の三次元座標を決定する方法および装置
【課題】対象物の三次元座標決定のための、改善された方法および装置を提供する。
【解決手段】対象物の三次元座標を決めるための方法において、プロジェクタ(3)によりパターン(6)が前記対象物(1)上に投影され、前記対象物(1)により反射された光がカメラ(4)により記録され、前記カメラ(4)によって記録された画像が測定される。前記対象物(1)の上および/または傍側にある基準点マーク(8)が、リファレンスカメラ(5)によって記録される。前記リファレンスカメラ(5)の視野(9)は、カメラ(4)の視野よりも広い。この方法を改善するために、前記リファレンスカメラ(5)は、前記カメラ(4)と、または前記プロジェクタ(3)および前記カメラ(4)を備える三次元センサ(2)と接続されている。
(もっと読む)
距離指標情報推定装置及びそのプログラム
【課題】本発明は、精度が高い距離情報を生成できる距離情報推定装置を提供する。
【解決手段】距離情報推定装置1は、ステレオ画像の類似度である誤差関数を計算する誤差関数計算部10と、距離の連続性を示すスムーズ関数を計算するスムーズ関数計算部11と、基準画像における隣接画素間の色情報の差分絶対値が色情報閾値Tc以下であるか否かによって、隣接画素間でメッセージを伝搬できるか否かを判定するメッセージ伝搬制限判定部12と、誤差関数とスムーズ関数とを含むメッセージを生成・伝搬するメッセージ生成・伝搬部13と、メッセージの評価関数を計算する評価関数計算部14と、評価関数が最小となる距離を、距離情報として推定する距離推定部15とを備える。
(もっと読む)
回転式レーザー測定装置
【課題】コンクリート壁等測定対象面の状態(凹凸量)を装置により自動的に、かつ精度良く測定できるようにする。
【解決手段】回転式レーザー測定装置は、レーザー光によって距離を測定する距離センサと、該距離センサを軸方向に駆動する第1の駆動手段と、同距離センサを軸周り方向に駆動する第2の駆動手段と、これら第1,第2の駆動手段を駆動制御する駆動制御手段とを備え、上記距離センサを測定対象面の長手方向と直交する面に沿って回転可能に支持するとともに、上記測定対象面の長手方向に沿って所定ピッチ毎に移動可能とし、該所定ピッチ毎に上記距離センサを移動させ、かつ所定の角度回転させながら、測定対象面の状態を自動的に測定して行くようにした。このような構成によると、自動的かつ容易に、しかも正確に凹凸その他の表面状態を測定して行くことができるようになる。
(もっと読む)
部品実装装置、および、三次元形状測定装置
【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
3次元位置・姿勢認識装置およびその方法、プログラム
【課題】本発明は、対象体本来の形状のうち部分的な形状の情報を欠いた計測点群を用いる場合であっても、対象体の3次元位置・姿勢を適切に認識可能な3次元位置・姿勢認識装置およびその方法、プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、計測点群と、対応するモデル点群とをマッチングさせ、モデル点群のうち、マッチング結果に基づいて特定される点を削除処理するモデル処理手段10と、計測点群と、モデル処理手段10において削除処理したモデル点群とをマッチングさせ、対象体3の3次元位置・姿勢を認識する認識手段11とを備えることを特徴とする。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
有関節座標計測機再配置方法
【課題】隠れ点を計測できるという有関節CMMの便利さと、より広い空間を計測できるというレーザトラッカの利点とを併せ実現する有関節座標計測機再配置方法を提供する。
【解決手段】本システム100では有関節座標計測機(CMM)200及びレーザトラッカ400を使用し、そのCMM200上にはレーザトラッカ400と対をなすレトロリフレクタを配置する。共通の基準座標系による座標値にCMM200による計測値及びレーザトラッカ400による計測値を変換できるためCMM200を移動させることができる。更に、レーザトラッカ400では計測できない隠れ点を有関節CMM200等で計測することができる。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】部品91の三次元認識を正確に実行する。
【解決手段】互いに異なる場所から部品91を撮像した2枚の撮像画像I1、I2に対してステレオマッチング処理が実行されて、2枚の撮像画像I1、I2間の視差pを示す視差画像Isが取得される。また、撮像画像I1からエッジEが抽出されて、部品91のエッジEを示すエッジ画像Ieが取得される。そして、エッジ画像Ieが示す部品91のエッジE上の位置での視差pが、視差画像Isに含まれる視差pから抽出されるとともに、こうして抽出された視差pに基づいて、三次元における部品91の位置および姿勢が認識される。これにより、部品91のエッジE部分の視差pに基づいて、三次元における部品91の位置および姿勢を認識することが可能となり、その結果、この三次元認識を正確に実行することが可能となる。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】ステレオマッチング処理において互いに異なる部品91a〜91c間で対応付けが行われるといった誤対応の発生を抑制する。
【解決手段】認識対象部品91aを含む複数の部品91a〜91cを異なる視点から撮像した複数の撮像画像I1、I2それぞれから、認識対象部品91aが写る対象領域R1、R2が抽出される。複数の撮像画像I1、I2それぞれの対象領域R1、R2に対して、ステレオマッチング処理が実行される。つまり、ステレオマッチング処理を行う領域R1、R2を、撮像画像I1、I2のうちの認識対象部品91aを含む対象領域R1に限定する。そのため、対象領域R1から認識対象部品91a以外の部品91b、91cを外してステレオマッチング処理を実行することができ、その結果、ステレオマッチング処理において互いに異なる物体間で対応付けが行われるといった誤対応の発生を抑制できる。
(もっと読む)
溶接ビード欠陥検出装置及び溶接ビード欠陥検出方法
【課題】溶接ビード欠陥の検出精度を向上できる溶接ビード欠陥検出装置及び溶接ビード欠陥検出方法を提供する。
【解決手段】溶接ビードの欠陥を検出する溶接ビード欠陥検出装置10であって、溶接モデルBLと平滑モデルSLとの比較、あるいは、平滑モデルSLと折線モデルVLとの比較、に基づいて、溶接モデルBLを、異常点と正常点とに分別する点群データ分別手段200と、異常点と、隣接する正常点間の距離と、に基づいて、溶接モデルBLを、欠落領域GGと非欠落領域GNとに分別する欠落領域分別手段300と、欠落領域GGまたは非欠落領域GNを順次併合して併合欠落領域GGGとする欠落領域併合手段400と、を具備する。
(もっと読む)
検査装置、検査方法及び検査プログラム
【課題】検査対象毎に検査パラメータを設定する必要がなく、半田付けの実装の良否を適切に判定すること。
【解決手段】複数の半田接合部を含む画像から、半田接合部を含む部分画像を複数抽出する抽出部と、抽出部により抽出された複数の部分画像を用いて、半田接合部の実装の良否を判定する基準となる基準画像を作成する作成部と、作成部により作成された基準画像と各部分画像とを比較する比較部と、比較部による比較結果に基づき、各半田接合部の実装の良否を判定する判定部と、を備える。
(もっと読む)
41 - 60 / 2,128
[ Back to top ]