
Fターム[2F065AA04]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 3次元 (2,128)
Fターム[2F065AA04]に分類される特許
161 - 180 / 2,128
形状測定装置、形状測定方法、及びそのプログラム
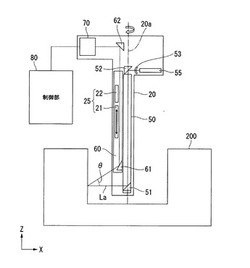
【課題】穴のある被検物に対して、その穴の内側の形状を効率よく適切に測定することができる形状測定装置を提供する。
【解決手段】中空状の被検物の内面に測定光を照射するとともに、該被検物に照射した測定光を受光して、被検物の形状を測定する形状測定装置は、被検物に照射するライン状の測定光を出力する光出力部と、光出力部と隔てて設けられ、予め定められた方向から受光する測定光の散乱光を検出する受光部と、測定光を検出する位置に応じて受光部の位置が調整され、照射した光の出力位置と、受光部の位置との距離に応じて被検物との距離を算定する制御部と、を備える。
(もっと読む)
形状測定装置

【課題】複雑な形状の被測定物に対して精度を高めて測定する。
【解決手段】形状測定装置(100)は、被測定物にライン光を照射する光照射部(21)及びライン光の照射方向とは異なる方向から被測定物に照射されたライン光を検出する光検出部(22)を有するセンサー部(2)と、光検出部(22)からの検出結果に基づいて被測定物の形状を測定する形状測定部(53)と、センサー部(2)と被測定物とを相対移動させる駆動部(11)と、測定方向に相対移動する間に形状測定部(53)によって得られた複数回の測定の結果に基づいて、測定時のセンサー部(2)と被測定物との少なくとも一方の姿勢を制御する測定制御部(56)とを備える。
(もっと読む)
情報処理プログラム、情報処理方法、情報処理装置および情報処理システム
【課題】マーカを精度良く認識する点について改善された情報処理プログラム等の提供。
【解決手段】情報処理装置のコンピュータを、画像を逐次取得する画像取得手段、取得された画像から特定対象を検出する特定対象検出手段、検出された特定対象の中央領域から得られた画素値に基づいて、当該中央領域に関連する第1領域情報を検出する第1領域情報検出手段、その検出結果が所定の条件を満たすか否かを判定する第1判定手段、特定対象のうち中央領域の周辺に存在する周辺領域から得られた画素値に基づいて、当該周辺領域に関連する第2領域情報を検出する第2領域情報検出手段、および少なくとも、第1判定手段による判定結果が肯定である場合に第2領域情報検出手段により検出された第2領域情報を出力する出力手段として機能させるための情報処理プログラム。
(もっと読む)
光学式位置検出装置、光学式位置検出システム、および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の三次元的な位置を光学的に検出することのできる光学式位置検出装置、光学式位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10において、第1光源モジュール126および第2光源モジュール127によって、検出光L2の放射角度範囲において強度が変化する光強度分布を形成した際の受光部13の受光強度に基づいて対象物体ObのXY座標を検出する。第1光源モジュール126および第2光源モジュール127は、Z軸方向で離間しており、検出光L2の放射角度範囲において強度が一定の光強度分布を形成した際の受光部13の受光強度に基づいてZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
3次元形状計測装置およびロボットシステム
【課題】3次元形状の計測処理を高速化すること。
【解決手段】スリット状の光線を計測対象物に対する照射位置を変更させながら照射する照射部と、前記光線が照射された前記計測対象物を順次撮像する撮像部と、前記撮像部によって撮像された画像を走査することによって前記画像における前記光線の位置を検出する位置検出部と、前記位置検出部による走査対象の画像よりも以前に前記撮像部によって撮像された画像における前記光線の位置に基づいて前記走査対象の画像における走査領域を決定する走査領域決定部とを3次元形状計測装置へ設ける。
(もっと読む)
ステレオカメラ較正装置およびステレオカメラ較正方法
【課題】マーカを設置するための較正用ポールの本数を少なくする。
【解決手段】回転可能であり、回転角の調整によって電子カメラによる第1、第2マーカの撮影を可能とする可動ミラーと、可動ミラーの回転角を取得する回転角取得装置12と、電子カメラの撮像面に対する第1、第2マーカの投影点の位置を検出する投影点検出装置13と、電子カメラのカメラ要素の相対的な位置関係、可動ミラーの回転中心軸の位置および第1、第2マーカの位置を記憶する記憶部15と、カメラ要素の相対的な位置関係、回転中心軸の位置、第1、第2マーカの位置、可動ミラーの回転角および第1、第2マーカの投影点の位置から電子カメラの位置および向きを算出するカメラ位置算出部18とを設ける。
(もっと読む)
監視装置及びプログラム
【課題】監視領域の撮影画像に基づいて監視を行う際、撮影画像の各画素について正確な三次元空間座標及び空間属性を保持するとともに常に最新の情報に更新することができる監視装置を提供する。
【解決手段】監視領域を連続撮影して得られた撮影画像の各画素に三次元座標により定まる位置を示す三次元空間座標を設定する設定手段(S103)と、撮影画像の各画素に該各画素が属する画像部位に対応する空間属性を付与すると共に、画像部位と隣接する画素の各々に画像部位との境界を示す空間属性を付与する付与手段(S113)と、境界を示す空間属性が付与された画素の各々から特徴量を繰り返し抽出する抽出手段(S117)と、抽出された特徴量の変化量が予め定められた閾値を超えた場合に、設定された三次元座標により定まる位置を示す三次元空間座標になるように前記画素の各々に設定された三次元空間座標を変更する変更手段(S129)と、を備えた。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
三次元計測装置および三次元計測方法
【課題】 最適パターン光投影のような強度変調パターン光投影手法による静止物体の三次元画像計測を行う。
【解決手段】 ワークWにパターン光を投影するパターン投影機21と全面照明機22と、パターン光が投影されたワークWを撮像して画像を撮像するカメラ23、24により撮像した画像のデータを処理するデータ処理装置42とから構成され、パターン投影機21によりパターン光を投影して画像を撮影する第1撮像モードと、全面照明機22による全照明反射画像を撮像する第2撮像モードがワークWの種類の特定によって判定される。その撮像結果によって三次元情報が算出されるので、精度の高い三次元情報を得ることができる。
(もっと読む)
情報処理装置、情報処理方法、および位置情報のデータ構造
【課題】対象物の動画像から応答性よく位置情報を取得する。
【解決手段】撮像装置12は第1カメラ22、第2カメラ24を含む。各カメラはそれぞれ、既知の幅を隔てた左右の位置から同じタイミング、同じフレームレートで対象物を撮影する。そして撮影した各フレーム画像を所定の複数の解像度の画像データに変換する。情報処理装置14の入力情報取得部26は、ユーザからの指示入力を取得する。位置情報生成部28は、ステレオ画像のデータのうち低解像度、広範囲の画像で対象物の領域または動きのある領域を対象領域としておよそ見積もり、当該領域のみ高解像度の画像でステレオマッチングを行い、対象物の3次元の位置を特定する。出力情報生成部32は、対象物の位置に基づき必要な処理を行い出力情報を生成する。通信部30は、撮像装置12に対する画像データの要求および取得を行う。
(もっと読む)
位置座標対応テーブル作成システム及び位置座標対応テーブル作成方法
【課題】車両に搭載された車載装置にて取得される車両の世界座標系と路側装置にて取得される車両のカメラ座標系との対応テーブルを作成する処理の効率化を図る。
【解決手段】車両の世界座標系の位置座標データを取得するとともに、光源/熱源を、その間隔が不均等となるパターンで間欠出力する車載装置20と、車両を撮影する路側装置10と、車載装置20における光源/熱源の出力タイミング情報と、路側装置10にて撮影された画像に含まれる光源/熱源の出力タイミングとに基づいて、車両の世界座標系の位置座標データと車両のカメラ座標系の位置座標データとを時刻同期させ、車両についての世界座標系の位置座標データとカメラ系座標の位置座標データとの対応テーブルを作成する位置対応テーブル作成部30とを有する。
(もっと読む)
視差算出装置、距離算出装置及び視差算出方法
【課題】二つの視点それぞれから得られた画像間の視差を算出する際、画像間の歪み又はずれの影響を抑え、精度の高い視差を簡易に算出する視差算出装置、距離算出装置及び視差算出方法を提供する。
【解決手段】視差算出装置100は、第一カメラ1から得られた基準画像及び第二カメラ2から参照画像を取得する。画像分割部101は、条件設定部102によって設定される分割条件に従い、基準画像及び参照画像それぞれを複数の領域に分割する。補正量決定部103は、分割された領域毎に画像ずれ量を算出し、その画像ずれ量に基づき補正量を決定する。視差算出部104は、補正量決定部103によって決定された補正量に基づいて画像分割部101から得られる分割基準画像及び分割参照画像の各領域に対して画像の補正を行い、補正後の画像に基づいて視差を求める。
(もっと読む)
ステレオカメラの配置方法とそのシステム
【課題】
計測対象物が遮蔽物によって遮蔽されている対象物を三次元計測する場合に、輪郭付近に見えている画像すべての点を使えるように、効率よく十分な候補点数を確保し、三次元計測を可能とするカメラ配置方法を提供する。
【解決手段】
本発明におけるカメラ配置方法は、遮蔽物の第一の輪郭線を近似することで得られる直線と第一のカメラの投影中心の位置とを有する第一のエピポーラ面と、第二の輪郭線を近似することで得られる直線と第一のカメラの投影中心の位置とを有する第二のエピポーラ面による交線を算出し、交線上に第二のカメラの投影中心を配置する。
(もっと読む)
指向エネルギーシステム
【課題】複数のエネルギー放射源を使用する指向エネルギーシステムにおいて、それぞれのエネルギー放射源から出力されるエネルギー束を目標に当てるための好適な制御を提供する。
【解決手段】指向エネルギーシステム(1)は、複数のレーザ光源(10)と、複数の指向装置(20)と、目標情報取得装置(30)と、制御装置(40)とを備える。複数の指向装置(20)は、複数のレーザ光源(10)のそれぞれから出力されるレーザビーム(11)の照射方向を変える。目標情報取得装置(30)は、目標(100)の方向を特定するための情報を含む目標情報(TAR)を取得する。制御装置(40)は、複数のレーザ光源(10)のそれぞれから出力されるレーザビーム(11)が目標(100)に照射されるように、目標情報(TAR)に基づいて複数の指向装置(20)を制御する。
(もっと読む)
3Dパターンマッチング方法
【課題】 レーザ計測等によって得られた3次元の点群データから対象物を精度よく検出する。
【解決手段】 レーザ計測によって得られた3次元の点群データに対して、ノイズを除去するためのリサンプリング処理を施す。そして、予め用意されたテンプレートとのマッチングを行う。テンプレートマッチングでは、まず、点群データおよびテンプレートを、共に所定サイズの格子に区切り、各格子内に存在するデータ点数をその格子の特徴量とする。こうして定義された特徴量に基づいて、点群データとテンプレートとを照合することによって、両者の位置関係、一致/不一致を比較的容易に判定することができる。テンプレートマッチングによって対象物が検出された後は、ICPマッチングによって、テンプレートと点群データとの位置関係をより精密に合致させ、対象物の検出を行う。
(もっと読む)
対象物の認識システム、見守りシステム、監視システム
【課題】エネルギ照射装置と2次元撮像装置を用いることで、種々の条件下で頑健に動作する対象物認識システムおよび見守りシステム、監視システムを提供する。
【解決手段】観測対象となる空間に向けて、所定の位置から照射方向を変えながら、エネルギを照射する照射手段と、照射手段で照射されたエネルギの反射エネルギを2次元的に感知し、対象となる空間を2次元的に撮像する撮像手段と、撮像手段で撮像した撮像画像上の切断曲線の特徴を用いて対象物の認識を行う認識手段とを備える対象物認識システムおよび該システムを備える見守りシステム、監視システム。
(もっと読む)
三次元計測治具及びこれを用いた三次元計測方法
【課題】計測対象物における孔の三次元座標を正確に計測することが可能である三次元計測治具及びこれを用いた三次元計測方法を提供する。
【解決手段】レーザ測定機LによってワークWにおける孔Whの三次元座標を得るのに用いられるリフレクタRを保持する三次元計測治具1であって、立形NCフライス盤10のスピンドル軸12に取り外し可能に装着される連結部2と、立形NCフライス盤10の動作によりワークWの孔WhにリフレクタRを相対的に接近させ、且つ、該ワークWにおける孔Whの縁にリフレクタRが接触した時点でリフレクタRを孔Whに押し付け可能なターゲット保持機構3を備えている。
(もっと読む)
3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラム
【課題】本発明は、簡易な構成で、エッジ部分の画像解析により対象体の3次元位置・姿勢認識が可能な3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、第1画像と、第2画像とのうち少なくとも一方に撮像された対象体1の画像要素を解析し、対象体1におけるエッジの方向を検出する検出手段4と、検出結果に基づいて、第1撮像手段2及び第2撮像手段3のうち少なくとも一方と対象体1との相対位置を変化させるか否かを判断する判断手段5と、第1撮像手段2及び第2撮像手段3のうち少なくとも一方を、対象体1に対して相対的に移動させる移動手段6とを備えることを特徴とする。
(もっと読む)
移動体検知システム
【課題】移動体に衝突されずに移動体を精度良く検知する移動体検知システムを提供する。
【解決手段】移動体検知システム1は、ステレオ動画像を撮像するステレオカメラ3と、ステレオ動画像が入力されるシステム本体4とを備える。システム本体4は、ステレオ動画像を処理する処理部6を有する。ステレオカメラ3及びシステム本体4は、移動体の移動に支障しないように移動経路外に設置される。ステレオカメラ3は、移動経路上に空間範囲として設定された検知範囲を撮像範囲に含むステレオ動画像を撮像する。処理部6は、ステレオ動画像における各フレームの画像並びにステレオカメラ3の光軸間隔及び焦点距離に基づいて、その移動体の空間位置を算出し、算出した移動体の空間位置が検知範囲内に入ったとき、その移動体を検知したと判定する。これにより、ステレオカメラ3及びシステム本体4は、移動体に衝突されずに移動体を精度良く検知する。
(もっと読む)
認識対象物、対象物認識装置およびプログラム、対象物認識システム
【課題】撮像される認識対象物の予め定められた位置に設けられ、共通平面上に位置する一の識別部と、他の識別部と、を有し、一の識別部を撮像可能な前記共通平面の法線方向に対して予め定められた角度範囲の一部からは他の識別部が撮像されることを抑制する、認識対象物を提供することにある。
【解決手段】撮像される認識対象物であって、予め定められた位置に設けられ、共通平面上に位置する少なくとも3の第一識別部からなる第一識別部群と、前記第一識別部群の位置に基づいて定められる位置に設けられた少なくとも1の第二識別部と、を備え、前記第一識別部は、前記共通平面の法線方向に対して予め定められた角度範囲0〜θ1度にて撮像され、前記第二識別部は、前記共通平面の法線方向に対して予め定められた角度範囲0〜θ2度にて撮像され、θ1とθ2とは、θ1>θ2の関係を有する、ことを特徴とする認識対象物。
(もっと読む)
161 - 180 / 2,128
[ Back to top ]