
Fターム[2F065AA04]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 位置;移動量 (12,734) | 3次元 (2,128)
Fターム[2F065AA04]に分類される特許
121 - 140 / 2,128
指示部材、光学式位置検出装置、および入力機能付き表示システム
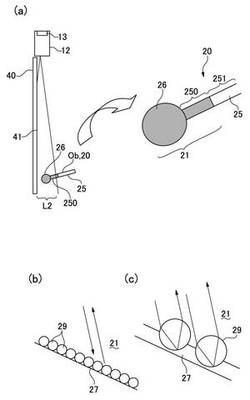
【課題】姿勢や位置にかかわらず、指示部材、該指示部材を検出対象物体とする光学式位置検出装置、および当該位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】指示部材20は、光学式位置検出装置において検出対象物体とされる部材であり、丸棒状の軸部25と、軸部25の先端に設けられた球体部26とを備えている。指示部材20は、球体部26の外周面、および軸部25において球体部26に接続された軸端部250の外周面が再帰反射部21になっており、軸端部250に対して基端側に接続された部分251は、赤外光を吸収する光吸収部になっている。
(もっと読む)
対象物検出装置

【課題】対象物検出装置は、画像に所定の対象物が含まれていることを検出するために、一定の処理量が必要となるパターン認識処理を行う。このパターン認識処理に必要となる処理量は、従来の対象物検出装置において比較的大規模なものとなっている。よって、このパターン認識処理における処理量を削減したいという要望がある。
【解決手段】撮像装置群が撮影する2枚1組のステレオ画像に写っている被写体における視差を利用して、画像を構成する画素毎に、被写体までの距離を算出する。そして、画像に写っている被写体のうち、背景よりも手前に写っている被写体の部分の画素群を抽出する。さらに、これら抽出した被写体の部分の画素群に対して、統計的学習に基づくパターン認識処理を行い、これら抽出した被写体の部分の画素群の中に、予め定められた所定の対象物が被写体として含まれていることを検出する。
(もっと読む)
追尾式レーザ干渉計
【課題】移動体の移動量と、移動体の移動方向と直交する方向におけるずれ量との測定にかかる測定時間を短くすることができるとともに、測定にかかるコストを低減できる追尾式レーザ干渉計を提供する。
【解決手段】追尾式レーザ干渉計1は、レトロリフレクタRで反射される測定光L22を用いて移動体Mまでの距離を測定する測長部21と、レトロリフレクタRで反射された測定光L21を受光する検出器222を備える追尾用光学部22とを有する本体2と、検出器222からの受光信号に基づいて本体2の姿勢を制御し、本体2にレトロリフレクタRを追尾させる制御手段3とを備え、制御手段3は、本体2にレトロリフレクタRを追尾させることを停止させた状態で、レトロリフレクタRで反射された測定光L21の検出器222における受光位置Q2に基づいて、移動体Mの移動方向に対して直交する方向における移動体Mのずれ量を測定するずれ量測定部32を備える。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】対象物体からの反射光を複数の受光素子で受光した際に各受光素子からの出力レベルの高低にかかわらず、対象物体の位置を精度よく検出することができる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10では、光源部12から検出光を出射した際、受光部13は対象物体Obからの反射光を第1受光素子131および第2受光素子132で受光する。信号処理部71は、第1受光素子131および第2受光素子132から出力された信号を加算した加算信号を位置検出部50に検出用信号として出力する際、加算出力が閾値以下のときには加算出力に第1倍率を乗じたレベルの信号を検出用信号として出力し、加算出力が閾値を超えるときには加算出力に第1倍率より小さな第2倍率を乗じたレベルの信号を検出用信号として出力する。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】種々の撮影対象について、ステレオマッチングにおける誤対応をより正確に検出することが可能な画像処理装置、画像処理方法および画像処理プログラムを提供する
【解決手段】画像処理装置201は、撮影対象を異なる方向から撮影して得られた複数の画像について、複数の画像間における画素の対応付けを行なうことにより視差を算出するためのステレオマッチング部10と、ステレオマッチング部10によって算出された視差に基づいて、画像における各画素の位置を3次元座標系における3次元座標に変換するための3次元座標計算部20と、3次元座標計算部20によって変換された各画素の3次元座標に基づいて、ステレオマッチング部10によって行われた対応付けの誤りを検出するための誤対応検出部30とを備える。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】処理時間を低減することができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、リモコン23を介して入力される指示に基づいて、計測対象物の画像上の第1の点と物体の画像上の第2の点とを指定する。CPU34cは、第1の点を基準とする第1の図形と、第2の点を基準とする第2の図形との幾何学計算を行い、幾何学計算の結果に基づいて、計測対象物の画像と物体の画像との少なくとも一方の姿勢または位置を調整する。CPU34cは、姿勢または位置が調整された後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
測距装置
【課題】対象物が存在する路面の勾配の影響を適切に補償しつつ、車載カメラによる撮像画像を用いて対象物と自車両との間の距離を精度よく測定することができる測距装置を提供する。
【解決手段】互いに異なる撮像時刻での車載カメラ2の2つの撮像画像から、自車両1からの距離が第1撮像画像の撮像時刻での対象物53の接地点P53と同じになる静止点Pの投影点となる特徴点を抽出する。計測したカメラ運動パラメータと、各撮像画像の特徴点の位置と、車載カメラ2の高さHcの値とから、車載カメラ2の下方に位置する路面51上の点から対象物存在路面52上の静止点に至る直線L2が車載カメラ2の光軸Lcに対してなす角度θを所定の演算式に基づいて推定する。角度θの推定値を用いて対象物53と自車両1との間の距離Dを推定する。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】従来の干渉計に比べて高精度な移動体の位置情報の計測を可能にする。
【解決手段】露光装置は、基板を保持して、XY平面内で移動し、XY平面に交差する反射面134を有するステージWSTと、計測装置20Y’とを備えている。計測装置は、ステージWSTの上方に配置され反射面134を介して入射した光ビームを回折させて反射面134に戻す固定スケール135と、反射面134に戻された光ビームを検出する検出部(124A、124B、126、28)と、を有する。計測装置は、固定スケール135からの戻りビームを、再度反射面134を経由させることで得られる前記光ビームの複数の回折ビームの干渉光を前記検出部で検出することで、ステージWSTのY軸方向の位置を計測する。
(もっと読む)
位置姿勢出力装置、位置姿勢出力プログラム及び位置姿勢出力方法
【課題】移動体の正確な位置および姿勢を時間遅れなく出力する。
【解決手段】位置姿勢出力装置10は、移動体のオドメトリを計算する計算部3から、オドメトリを第1の間隔で取得する。オドメトリ及びオドメトリ以外の情報を用いて移動体の位置及び姿勢を推定する推定部5から、移動体の位置及び姿勢の推定結果を第1の間隔より長い第2の時間間隔で取得する。移動体の位置及び姿勢の推定結果が取得された場合に、更新後の移動体の位置及び姿勢の値が、オドメトリの差分に基づく位置及び姿勢と、移動体の位置及び姿勢の推定結果との間に遷移するように、記憶部13に記憶された移動体の位置及び姿勢を更新する。オドメトリが第1の間隔で取得される度に、当該オドメトリと今回の推定に用いられたオドメトリとの差分を記憶部13に記憶された移動体の位置及び姿勢に足し合わせた上で出力する。
(もっと読む)
三次元計測装置、三次元計測装置の制御方法、およびプログラム
【課題】パターンの1周期を撮像素子の少ない画素数でサンプリングした上で交点間隔の誤差を低減し、三次元計測の精度を向上する。
【解決手段】明部と暗部とが交互に配置された第1の明暗パターン光が投影された対象物を撮像して取得される第1の画像の階調値と、当該第1の明暗パターン光の位相をずらした第2の明暗パターン光が投影された当該対象物を撮像して取得される第2の画像の階調値とを用いて、当該第1の明暗パターン光と当該第2の明暗パターン光との複数の交点位置を検出する検出部と、検出部により検出された複数の交点位置に含まれる第1の交点位置と当該第1の交点位置と隣接する第2の交点位置とに基づいて、第3の位置を算出して、当該第3の位置の間隔に基づいて対象物の三次元位置を計測する計測部と、を備える。
(もっと読む)
物品認識装置、物品認識システム、プログラムおよび物品認識方法
【課題】 表面に光沢がある複数の物品をステレオカメラを用いて認識する。
【解決手段】 認識対象の複数の物品からなる物品群を撮像する第1および第2カメラを備えたステレオカメラを制御するカメラ制御部と、物品群を互いに異なる方向から照明する第1ないし第3照明装置を制御する照明制御部と、第1ないし第3照明装置のうちの何れか1つを順次点灯させて、ステレオカメラによってそれぞれ撮像された一対の2次元画像からなる第1ないし第3画像対を取得する撮像処理部と、第1ないし第3画像対に含まれる少なくとも1つの2次元画像から物品をそれぞれ含む領域を抽出する抽出処理部と、領域ごとに、第1ないし第3画像対のうち第1および第2カメラ間の受光量の差が所定値以下である画像対に基づいて物品の3次元画像を生成する3次元化処理部と、3次元画像に基づいて物品を認識して位置・姿勢情報を算出する認識処理部と、を有する。
(もっと読む)
面形状計測装置
【課題】被検面の形状を高精度に計測する。
【解決手段】被検面10の形状を計測する面形状計測装置であって、光源1からの光を参照光と被検光とに分割して被検光を被検面10に照射する計測ヘッド110と、計測ヘッド110を収納する収納部と、光源1からの光を計測ヘッド110へ入射させ、被検面10に対する被検光の入射角度を変える変更部120と、被検面10で反射され計測ヘッド110に戻ってくる被検光と参照光との干渉光を検出する検出部と、計測ヘッド110の位置を計測する位置計測部116−118と、検出結果および計測結果を用いて被検面10の形状を求める処理部9とを備え、変更部120は、光源1からの光を計測ヘッド110の収納部の外側から計測ヘッド110に入射させ、光源1からの光が計測ヘッド110に入射する位置を変えることによって入射角度を変える。
(もっと読む)
ステレオカメラ装置、ステレオカメラシステム、プログラム
【課題】2台のカメラで撮像した撮像画像の対応付けを容易にする。
【解決手段】2台のカメラ1、2は、光軸を平行にして配置される。カメラ1、2が撮像した撮像画像の画素の位置は、受光面に規定した2次元の直交座標である第1座標系で表される。また、実空間の点の位置は、カメラ1、2の光学中心を結ぶ第1方向と、カメラごとの光軸の方向である第2方向と、第1方向および第2方向に直交する第3方向との3軸の周りのそれぞれの角度によって表される。演算処理部10は、撮像画像を第1方向の軸周りの角度と第2方向の軸周りの角度とで位置が表される第1変換画像に変換する第1変換部101と、撮像画像を第1方向の軸周りの角度と第3方向の軸周りの角度とで位置が表される第2変換画像に変換する第2変換部102と、第1変換画像および第2変換画像を用いて視差を求める視差推定部103とを備える。
(もっと読む)
レーザ計測用ターゲット治具及びレーザ計測システム
【課題】計測システム全体の小型化及び軽量化を図るとともに、配管の取付位置を正確に特定することができる、レーザ計測用ターゲット治具及びレーザ計測システムを提供する。
【解決手段】第一フランジ11に一端部2a及び中間部2bが固定される計測器用固定治具2と、第二フランジ12に固定されるレーザ計測用ターゲット治具3と、計測器用固定治具2の他端部2cに固定されるレーザ計測器4と、第一フランジ11及び第二フランジ12の位置を算出する演算手段5と、を備え、レーザ計測用ターゲット治具3は、第二フランジ12に配置される台座31と、レーザ光を反射可能な表面32aを有し台座31に表面の一部が突出するように固定された球体32と、台座31を第二フランジ12に固定する固定手段33と、を有する。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な
使い易さ、ならびに低コストを有する間接式アームを提供する。
【解決手段】関節式アームCMM1は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
眼鏡用測定装置及び三次元測定装置
【課題】 被検者に負荷をかけることなく角膜眼鏡間距離等の測定を行う眼鏡用測定装置を提供する。
【解決手段】 眼鏡用測定装置(10)は、指標マーク(SC)が眼鏡フレーム(23)に取り付けられた眼鏡(20)をかけた被検者を撮影する撮影部(12)と、撮影部で撮影された被検者の眼球の頂点を求めるとともに、指標マーク(SC)に基づいて眼鏡の眼鏡レンズ(21)と被検者の眼球の頂点(KP)との角膜眼鏡間距離(KG)を演算する演算部(14)と、を備える。
(もっと読む)
移動環境認識装置及び方法
【課題】高速、且つ高精度に測定対象の形状認識情報を得ることができる移動環境認識装置を提供する。
【解決手段】測定対象7に対して円錐走査を行う円錐走査手段1を備えている。円錐走査手段は、移動環境検出器3と、この移動環境検出器で計測した情報を加工する外界認識装置9を備えている。この外界認識装置は、円錐走査手段の測定データに基づいて前記測定対象の傾斜角、傾斜方向及び測定対象中心までの距離を算出する移動環境検出手段と、この移動環境検出手段が算出した前記測定対象の算出データに基づき、各測定対象の面形状を判断する面形状判断手段と、この面形状判断手段が水平面と判断した所定の測定対象の形状を認識する形状認識手段とを備えている。
(もっと読む)
位置検知システム、それを用いた移動体、位置検知方法およびそのためのプログラム
【課題】センサの計測範囲に特徴的な被写体が存在していない場合や、そのセンサが他のセンサの計測範囲外にあるときにも、その位置姿勢の算出を可能にする。
【解決手段】第1のセンサは、環境内の存在物の位置情報および色情報を第1の検知情報として得るものであり、第2のセンサは、存在物の色情報を第2の検知情報として得るものであり、情報処理装置は、第2のセンサの位置姿勢を仮に設定する位置姿勢仮設定部と、位置姿勢仮設定部により仮に設定された第2のセンサの位置姿勢から存在物を検知したときに得られる検知情報を、仮想検知情報として、第1の検知情報を用いて仮想的に作成する仮想検知情報作成部と、仮想検知情報作成部で作成された仮想検知情報と第2のセンサで得られた第2の検知情報を比較する比較部と、比較部の比較結果と仮に設定された第2のセンサの位置姿勢から、第2のセンサの位置姿勢推定値を出力する位置姿勢推定部を備える。
(もっと読む)
121 - 140 / 2,128
[ Back to top ]