
Fターム[2F065AA51]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 輪郭 (4,339)
Fターム[2F065AA51]の下位に属するFターム
Fターム[2F065AA51]に分類される特許
201 - 220 / 1,007
物体表面の形状測定装置、その形状測定方法及び部品キット
【課題】干渉測定および非干渉測定の両方を通して物体表面の高さマップを定める装置を提供する。
【解決手段】本発明は、表面の高さマップを定める装置であって、表面が測定される物体の位置決め手段と、光源と、受けた光を電気信号に変換する光検出器と、光源からの光を表面に向け、表面からの光を光検出器に向ける第1の光学系と、第1の光学系と表面との間に配置されるビームスプリッタと、参照ミラーと、ビームスプリッタとミラーとの間に配置され、ビームスプリッタからの光をミラーに向けると共に、ミラーからの光をビームスプリッタに向ける第2の光学系と、走査手段と、光検出器からの信号を高さマップに変換するように構成された処理手段とを備え、ビームスプリッタが偏光ビームスプリッタであり、光源と第1の光学系との間に、制御可能な偏光コントローラが配置される、装置に関する。
(もっと読む)
画像処理装置および画像処理プログラム

【課題】3次元画像処理といった、複数の撮像部からそれぞれ生成される画像データを処理することのできる画像処理装置において、特定の画像処理に必要な複数の画像データをそれぞれ生成する複数の撮像部に対する各種設定を容易に行うことのできる画像処理装置を提供することである。また、そのような画像処理装置に向けられた画像処理プログラムを提供する。
【解決手段】接続される複数の撮像部をいくつかのグループに分けた上で、各グループに属する撮像部を一まとまりにして、必要な撮像条件を設定するためのユーザインターフェイスを提供する。
(もっと読む)
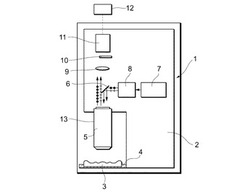
形状測定装置及び形状測定方法
【課題】ノイズの影響を抑えて、安定した精度の高い測定結果を得る。
【解決手段】広帯域スペクトルを有する光源1から被測定対象4までの第1光路長と光源4から参照面5までの第2光路長との光路長差によって変化する被測定対象の測定面内の各測定位置に対応した干渉光強度を示す干渉光強度分布画像を、光路長差を変化させながら、画像記憶手段9に順次記憶する。干渉光強度分布画像の各測定位置における光路長差の変化に伴う干渉光強度の変化を示す干渉光強度列に対し、その強度の中心から強度軸の正負方向に所定のスレッショルドレベルを設定する。スレッショルドレベルを超える干渉光強度のデータをピーク位置候補として求め、最もピーク位置候補が密集している領域の重心を干渉光強度列のピーク値として求める。
(もっと読む)
連続部品の検査方法、連続部品の検査プログラムおよび連続部品の検査装置
【課題】プレス加工等により所定の繰り返しピッチで複数個が帯状の材料に加工された連続部品に対する検査技術を提供する。
【解決手段】連続部品の検査方法は、正常品である連続部品の画像を取得する画像取得手順S1と、その画像から垂直エッジを検出してエッジピッチを求め、エッジピッチのヒストグラムを作成するエッジピッチヒストグラム作成手順S6と、連続部品の繰り返しピッチである基準ピッチを求める基準ピッチ算出手順S7と、連続部品が存在する画像領域の上限と下限を求め、その間の領域で基準ピッチ内に単一の部品が納まる画像領域を切り出すテンプレート領域抽出手順S8と、切り出された画像領域をテンプレートとして登録するテンプレート登録手順S9と、検査対象の連続部品の画像を取得し、テンプレートと基準ピッチとを用いて良否を判定する検査手順とを備える。
(もっと読む)
セラミックシートの検査方法およびセラミックシートの製造方法
【課題】本発明は、セラミックシートの自動的な検査にも適用できるものであり、大量のセラミックシートから反りなどの欠陥を効率良く且つ正確に検出するための方法を提供することを目的とする。
【解決手段】本発明に係るセラミックシート(但し、固体酸化物形燃料電池の固体電解質膜用セラミックシートを除く)の検査方法は、当該セラミックシートの反りを三角測距式変位センサーで検出する工程;および、次に、セラミックシートの表面および内部に存在する欠陥を透過型光電センサーで検出する工程を含むことを特徴とする。
(もっと読む)
切削装置
【課題】撮像手段によって撮像された切削溝の状態を正確に判定することができる機能を備えた切削装置を提供する。
【解決手段】チャックテーブルに保持された被加工物を切削するための切削ブレードを備えた切削手段と、光照射器によって切削溝に光を照射して切削溝を撮像する撮像手段と、撮像された切削溝の状態を判定する制御手段と、加工条件を入力する入力手段と、表示手段と、警報手段とを具備する切削装置であって、制御手段は、入力された加工条件および撮像された切削溝の状態に基づいて切削溝が適正か否かを判定する切削溝判定工程と、切削溝が適正でないと判定した場合には、光照射器の光量を所定範囲において調整しつつ適正であると判定したときに光量を修正光量として変更し、光照射器の光量を所定範囲において調整しても切削溝が適正でないと判定した場合には警報手段を作動するとともに表示手段にエラーメッセージを表示する光量学習工程を実行する
(もっと読む)
弱い光及び蛍光の光の用途において信号対ノイズ比、解像度、又は合焦品質を犠牲にすることなく検査速度を最適化するための方法
【課題】電子部品の高いスループットの自動的検査を可能にする、高速オートフォーカスの方法を提供することである。
【解決手段】強い光、弱い光、及び蛍光の光の用途における、要素の光学検査中の検査速度を最適化する方法。自動収束メカニズムと、高速度CCDカメラと高開口数(NA)光学部品とを組み合わせたときに、優れた信号対ノイズ比、解像度、及び検査の速度性能を達成する、蛍光及び非蛍光用途に対して最適化された方法が記載される。
(もっと読む)
物体の自動認識方法及び物体の自動認識装置
【課題】処理が複雑になることなく、超音波を用いてあらゆる材質の物体の距離計測と形状認識とを正確に行うことが可能な物体の自動認識方法及び物体の自動認識装置を提供する。
【解決手段】特定の空間を撮像してイメージ画像を取得する画像取得工程と、イメージ画像に基づいて、そのイメージ画像に写る輪郭を囲んだ小領域にて分割された輪郭画像を作成する画像処理工程と、前記空間に超音波を送信する超音波送信工程と、前記超音波が反射して生成された反射波を受信する超音波受信工程と、前記反射波の受信信号を測定して、この受信信号の強度に基づいて、空間の物体の存在及び距離を表示する受信信号分布画像を作成する受信信号測定工程と、前記輪郭画像と受信信号分布画像とを重合わせる重合わせ工程と、前記重合わせにより、前記輪郭画像において、受信信号が重なる小領域を物体の輪郭であると特定する物体特定工程とを備えた。
(もっと読む)
画像処理型測定機および画像処理測定方法
【課題】赤、緑、青等の少なくとも1以上に着色された被測定物の画像に対して、エッジ検出の信頼性を向上させる。
【解決手段】赤色LED31、緑色LED32および青色LED33を有する照明装置30と、各光源の照度を独立的に制御可能な制御部61と、被測定物1からの反射光を赤色光、緑色光および青色光に分光し、それぞれの光に基づく赤色光画像信号R、緑色光画像信号Gおよび青色光画像信号Bに分解して出力するカラーイメージセンサ50と、赤色LED、緑色LEDおよび青色LEDからのいずれかの光を被測定物に照射したときに、カラーイメージセンサから得られる画像信号のうち照射光と同じ色の画像信号に対して濃淡画像処理を施す画像処理部62とを備える。
(もっと読む)
メッシュ検査装置、メッシュ検査方法、プログラム、および記録媒体
【課題】エッチングや印刷のムラによりメッシュ幅の太さの変化に影響されずに正確な欠陥抽出を行うことが可能なメッシュ検査装置を提供する。
【解決手段】メッシュ検査装置1の処理部3は、ラインセンサ5からメッシュシート10のメッシュが画像に写る分解能で画像を入力し、前処理として光源である白色LED照明7によるシェーディングの補正を行い、前処理した画像を平滑化し、欠陥を誤検出しない程度に画像をぼかす。平滑化した画像内でしきい値により欠陥を抽出し、抽出した欠陥の重心を中心に例えば128×128画素を平滑化前の画像からトリミングする。トリミングした画像のFFT画像でメッシュの空間周波数に相当する領域を0に置き換えてメッシュ周波数を除去した後、IFFT処理を施し、得られた画像から欠陥の輝度、形状、面積の判定を行い、結果を出力する。
(もっと読む)
走行機構測定用のレーザプロジェクタ
走行機構測定用のレーザプロジェクタ(2)は、レーザ光ビーム(8)を送出するレーザ光源(4)と、レーザ光ビーム(8)により照射されると、パターン化されたレーザ光パターン(9)を発生する光学素子(6)と、検出器(10)と、評価装置とを有している。検出器(10)は、動作中、パターン化されたレーザ光パターン(9)の少なくとも1つの領域により照射されるように配置されていて、この照射と相関する出力信号を発生する。評価装置は、検出器(10)により発せられた出力信号をまえもって定められた少なくとも1つの目標値と比較し、出力信号と目標値との大きな偏差を検出するとレーザ光源(4)をスイッチオフする。  (もっと読む)
(もっと読む)
マスク形状計測方法及び装置、並びに露光方法及び装置
【課題】計測用の光学系を大型化することなく、マスクの面形状の情報を効率的にかつ高精度に計測する。
【解決手段】レチクルの形状情報を計測する計測装置において、投影光学系PLの物体面側に配置され、複数の位相マーク20が形成されたパターン面を有するレチクルRと、投影光学系PLの像面側に配置され、位相マーク20に対応して複数の周期パターン39が形成された蛍光膜35と、位相マーク20、投影光学系PL、及び周期パターン39を通過した照明光ILから生成される検出光DLを検出するFOP37及び撮像素子38と、撮像素子38の検出信号からそのパターン面の形状情報を求める演算装置とを備える。
(もっと読む)
ノズルギャップ測定装置
【課題】ノズルに傷がつくことを防止しつつ、高精度かつ高効率にノズルギャップの測定を行うことができるノズルギャップ測定装置を提供すること。
【解決手段】センサ装置130から光ビームX1を照射し、ノズル22と被照射面110aとで反射した反射光X2を受光して、ノズル22と被照射面110aとの間のギャップを測定することで、ノズルギャップを測定することができる。このように、光ビームX1を用いて非接触状態でノズルギャップを測定することができるので、ノズル22に傷がつくことを防止することができる。また、当接面120aをホルダ23の底面23aに当接させることで、ノズルギャップを測定可能な状態とすることができるので、センサ装置130の設置や測定に要する時間を短縮して、高効率に測定することができると共に、測定者の個人差による測定精度のばらつきを回避して、高精度に測定することができる。
(もっと読む)
メトロロジ方法および装置、リソグラフィ装置、リソグラフィプロセシングセル、およびメトロロジターゲットを備える基板
【課題】より小さいターゲット上のより正確な測定 を行うことができる、改善されたメトロロジ方法および基板上の複数のターゲットの特性を測定するように構成されたメトロロジ装置等を提供する。
【解決手段】メトロロジ装置を配置してオフアクシス照明モードで複数のターゲットを照明する。1つの1次回折ビームのみを用いてターゲットのイメージを得る。ターゲットが複合格子である場合、回折格子のイメージの強度からオーバーレイ測定値を得ることができる。イメージフィールド内の格子の位置変動に起因するエラーについてオーバーレイ測定値を補正することができる。
(もっと読む)
画像パターン認識システム及び方法
【課題】画像特徴ベクトルを使用した画像パターン認識用のシステム及び方法を提供する。
【解決手段】画像特徴部に見つけられるベクトルに対応する、それぞれのベクトルインデックスを格納するため、ベクトルセットが生成される(ステップ210)。画像特徴部に対する各ベクトルの相関関係が計算される(ステップ215)。画像特徴部に対する各ベクトルの相関関係が対応のベクトルインデックスとともにベクトルセットに格納される(ステップ220)。次に特定される画像のために、上記トレーニング段階が繰り返される(ステップ225)。新しい画像の候補領域が特定される(ステップ230)。候補領域におけるベクトルに対応する特別のベクトルセットへの相関関係の平均が計算される(ステップ235)。候補領域が一若しくは複数のベクトルセットにより表される特徴部を示す可能性を判断するために、上記平均が評価される(ステップ240)。
(もっと読む)
半導体ウェハの検査及び処理方法
【課題】マクロ検査ツールの適用性を広げ、高スループットで半導体ウェハからより詳細な検査情報を得る。
【解決手段】ウェハ検査方法は、ウェハ上に繰り返し配列されている個々の微細構造を解像するには不十分な結像解像度でウェハの全表面を結像させるステップを含む。本発明によれば、微細構造のフィーチャの特性は、微細構造を結像において直接解像することができないとしても、被選択検出信号群からの1若しくは複数の値の計算によって決定される。このようにして、記録される画像にマスク(109)が施され、画像の非マスク部分(111)は平均化によってさらに処理される。非マスク部分(111)は、ウェハのメモリ部分を含むように選択される。フィーチャ特性は、線幅、側壁の角度、微小寸法(CD)などを含むことができる。互いに異なる照明波長または偏光状態で撮影した複数の画像を組み合わせることもできる。
(もっと読む)
インスペクション方法
【課題】プロファイル及びそのバリエーションをユーザが設定するのを手助けするシステムを提供する。
【解決手段】既知のオブジェクトのイメージ42を取り込むこと、及び、このイメージ上に、手動又は自動によって推定プロファイル20を重畳すること、を含む。推定プロファイルは数学的に定義され、かつ、上記イメージと一致するようにセグメント毎に調節される40ことによって、調節された推定プロファイルが、上記イメージに関連する当該回折スペクトルとともに記憶される。あるいは又はこれに加えて、ユーザは、既知のイメージのプロファイルをトレース(又は自由描写)し、その後、多項式、スプライン、又はベクトル等の数学関数の形状定義物を推定プロファイル上に描くことにより、未知のオブジェクトのプロファイルをその回折パターンから再構成する際に使用し得る。
(もっと読む)
欠陥検査方法及び欠陥検査装置
【課題】被検体を撮影する際に自動的に焦点を合せ、得られた画像から欠陥の有無を判断する欠陥検査方法及び欠陥検査装置を提供する。
【解決手段】撮影して得られた画像から欠陥の有無を判断する欠陥検査方法において、撮像手段2の焦点を合せる自動焦点調節ステップと、被検体における欠陥の有無を判断する画像解析ステップとを具備し、自動焦点調節ステップは、被検体と撮像手段2との距離又は撮像手段2の焦点距離を複数回変更して撮影し、得られた各画像から被検体の輪郭を抽出処理し、各輪郭抽出画像に対して離散フーリエ変換処理を用いることで周波数領域に変換し、周波数領域における輝度値の総和を算出し、輝度値の総和が最大となる被検体と撮像手段2との距離又は撮像手段2の焦点距離を特定し、特定された被検体と撮像手段2との距離又は撮像手段2の焦点距離に調節する、とした。
(もっと読む)
部材の位置認識装置、位置決め装置、接合装置および部材の接合方法
【課題】部材の角にダレや欠けが発生している箇所と発生していない箇所が混在している部材の外形線を、画像処理を用いて正確に認識する。
【解決手段】平面を有する部材4を平面に垂直な方向から撮像した画像から部材4の外形線を演算する画像処理部3は、撮像部1が撮像した画像で部材の外形線と交差する複数の認識ラインのそれぞれで、部材4の外から内への方向で輝度が明から暗に変化する暗変化端点候補を検出する暗変化端点候補検出部3C、部材4の外から内への方向で輝度が暗から明に変化する明変化端点候補を検出する明変化端点候補検出部3D、暗変化端点候補と明変化端点候補とから端点を検出する端点検出部3E、複数の認識ラインで検出された端点との誤差の和が最小になるように部材の外形線を決定する外形線決定部3Fを有する。
(もっと読む)
歩行補助装置
【課題】高精度に障害物の距離および位置を測定し、障害物に関する情報を提示する。
【解決手段】カメラにより得られた、歩行方向に存在する対象物の撮像画像をもとに、当該撮像画像の画素ごとに当該カメラから対象物までの距離を計測する距離計測手段106と、前記対象物が接地する平面に前記画素を写像した場合の画素位置と、前記計測された距離とを関連付けた距離情報を格納する格納手段107と、前記格納部に格納された距離情報をもとに、前記平面に形成される凹凸の状態を検出する凹凸検出手段115と、前記検出された凹凸の状態を歩行者に報知する報知手段116と、を具備する。
(もっと読む)
201 - 220 / 1,007
[ Back to top ]