
Fターム[2F065AA51]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 輪郭 (4,339)
Fターム[2F065AA51]の下位に属するFターム
Fターム[2F065AA51]に分類される特許
161 - 180 / 1,007
低密度の反射対応から鏡面物体の表面を再構築するための方法
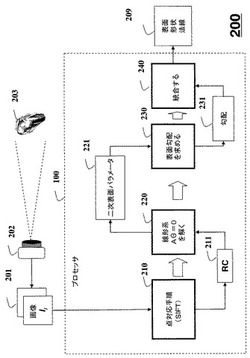
【課題】低密度の反射対応から鏡面を再構築する。
【解決手段】点対応手順が鏡面物体203の画像のセットに適用され、低密度の反射対応が生成される(210)。画像のセットは、カメラ202によって取得される間、回転を受ける。すなわち、カメラ202、環境、又は物体203のいずれかが回転する。線形系AΘ=0が解かれる(220)か、又は関連する二次錐計画(SOCP)が解かれる。ここで、Θは局所表面パラメーターのベクトルである。表面の勾配は局所二次曲面パラメーターから得られ(230)、勾配は法線を得るために統合される(240)。ここで法線は表面の形状を定義する。
(もっと読む)
形状欠陥検査方法およびその装置

【課題】
プリント配線基板等、特に光透過型電子基板の欠陥を、基板のずれを気にせずに光学的処理により高精度、迅速、かつ、自動的に検出することができる形状欠陥等の検査方法および検査装置を提供する。
【解決手段】
可干渉性レーザ光源、可干渉性平行レーザ光束中に設置されたフーリエ変換レンズと、そのレンズの前方に設置された検査物体の回転を抑えるためのガイド溝を通して搬送する検査物体の導入手段または検査物体形状写出手段と、前記レンズの光軸中心の後焦点面または光軸中心の後焦点面付近に設置された形状識別手段としての光差分または排他的論理和を行う光学フィルタ(光差分フィルタまたは光相関フィルタ)を含む光差分器や光相関器と、光学フィルタを前焦点面として設置された逆フーリエ変換レンズと、逆フーリエ変換レンズからの画像を撮り込む電子カメラ、とで構成される画像の差異や画像欠陥を検査する方法および装置。
(もっと読む)
外形検出装置および外形検出方法
【課題】検査対象物の外形の検出精度を悪化させることなく、載置台から検査対象物にかかる応力を軽減できる外形検出装置および外形検出方法を提供する。
【解決手段】太陽電池セル7を載置面3aの外周17よりも内側に載置するステージ2aと、載置面3a上に設置された金属箔テープ6と、太陽電池セル7および金属箔テープ6に照明光8を照射する同軸落射照明装置11と、照明光8の反射光9を受光するCCDカメラ12と、CCDカメラ12の出力信号から、太陽電池セルの外形を検出する画像処理装置13と、を備え、載置面3a上に設置された金属箔テープ6が、太陽電池セル7の照明光8が照射される面23と金属箔テープ6の照明光8が照射される面26とが、照明光8が出射する側から見て光学的に連続するように設置する。
(もっと読む)
視覚検査システム
【課題】ワークに対してカメラを任意の位置、姿勢に移動させながら視覚検査を行うことができるものであって、設備全体の小型化を図る。
【解決手段】支持台2上にYZロボット3を設け、その前方に回転テーブル4を設ける。YZロボット3は、Z軸移動機構5、Y軸移動機構6、前後(Y軸)方向に延びる光軸Oを有しワークWを撮影するカメラ7を備え、カメラ7を前後(Y軸)及び上下(Z軸)方向に自在に移動させる。回転テーブル4は、ワークWを載置し、垂直方向に延びる回転軸θ周りに自在に回転させる。カメラ7の先端に180度以上の画角を有する超広角レンズ10を設ける。
(もっと読む)
レーザ形状認識センサ及び計測装置
【課題】測定対象物より後方の物体での反射光をカメラが受像しないようにする。
【解決手段】測定対象物1に線状のレーザ光5aを照射し、測定対象物1での反射光をカメラ4で受像することで、その形状を撮像するレーザ形状認識センサである。測定対象物1にレーザ光5aを扇状に照射するレーザ光源5と、このレーザ光源5から照射されたレーザ光5aの測定対象物1での反射光を、抽出したい波長のみを通過させるフィルター6を介して受像するカメラ4を有する。レーザ光源5のレーザ光5aの照射範囲5bをカメラ4の素子列方向の視野4aがカバーでき、かつ、カメラ4の高さ方向の検出範囲4bは測定対象物1より後方はカバーしないように、レーザ光5aの光軸に対して角度θをつけてカメラ4を、同一の筐体7内に組み込む。
【効果】正確で安定に形状を計測することができる。
(もっと読む)
画像処理装置
【課題】実際の対象物と撮像手段との関係を確認する作業や、対象物と画像処理結果とを比較する作業を、モニタを用いることなく容易に行うことができるようにする。
【解決手段】撮像部1内に、LCD12を含む投光部11をCCD10と同軸になるように配備し、LCD12に表示された画像がCCD10の視野に向けて投影されるようにする。処理部2では、CCD10により生成された画像を用いてワークW0の欠陥Dを検出し、その欠陥を含む領域Rに対応する領域RPに周囲より明るい画像データが設定された投影用画像50を生成し、これを投影部11に与えて投影させる。この投影により、ワークW0の表面のうち、画像処理により欠陥として検出された範囲が、領域RPの投影像によるマーキングパターンMにより明示される。
(もっと読む)
形状認識装置
【課題】透明体からなる板状物であっても輪郭を明確に特定する形状認識装置を提供する。
【解決手段】板状物10の輪郭を検出する形状認識装置6であって、板状物10を保持する保持テーブル3と、保持テーブル3上に保持され板状物10を撮像する撮像手段61と、撮像手段61下側に配設された照明手段62と、照明手段62によって照射され保持テーブル3上に保持された板状物10で反射した反射光のうち撮像手段61による撮像領域の正反射光を遮蔽する遮蔽手段63とを具備している。
(もっと読む)
接触角計用画像処理装置および液滴の平面視輪郭形状導出方法
【課題】接触角計において液滴の平面視輪郭形状をより高精度に測定可能な接触角計用画像処理装置および液滴の平面視輪郭形状導出方法を提供する。
【解決手段】本発明に係る接触角計用画像処理装置120は、試料上の液滴の接触角を測定する接触角計において試料上の液滴を撮像した画像を処理する画像処理装置であって、試料上の液滴を上方から撮像した液滴平面画像に基づいて液滴の平面視輪郭形状を導出する形状導出手段140を備えている。
(もっと読む)
円筒体の輪郭形状を測定するための方法及び装置
ボア検査システムおよび、これを用いた検査方法
形状測定方法及び形状測定装置
【課題】被検物の表面形状を高精度かつ短時間で測定する。
【解決手段】被検物の表面で反射された物体光と参照光との光路差によって得られる干渉縞を解析する形状測定装置を用いて被検物の表面形状を測定する本発明の形状測定方法は、参照面を第1位置に固定して被検物の複数の位置における第1干渉縞を取得する第1工程と、参照面を参照光の光軸上の第2位置に固定して、複数の位置における第2干渉縞を取得する第2工程と、参照面を参照光の光軸上の第3位置に固定して、複数の位置における第3干渉縞を取得する第3工程と、第1干渉縞と、第2干渉縞と、第3干渉縞とを用いて、被検物の複数の位置における干渉縞の位相解析を行う位相解析工程S20とを備え、第1干渉縞、第2干渉縞、及び第3干渉縞の少なくとも1つは、被検物を形状測定装置に対して相対移動させながら複数の位置の近傍で断続的に取得された複数の干渉縞に基づいて取得される。
(もっと読む)
形状測定装置及びこれを用いた工作機械
【課題】数値処理可能な鮮明且つ正確なエッジ画像を撮像しつつ、測定する工具の両端のエッジの位置関係を正確に測定する形状測定装置を提供する。
【解決手段】本発明の形状測定装置9は、平行光を発する光源モジュール11と、光源モジュール11の発する平行光の光軸16に沿って配置された対物レンズ23と、対物レンズと共焦点を有する投影レンズ24と、この共焦点に配置され入射光のうちの0次光の光線を遮光するアンチピンホールフィルタ25とを備えた投影光学系を備えたレンズ鏡筒13と、光軸16を含む基準面に対して対称に、光束の方向を変えずに平行移動させて離間させる光線分離器33と、結合させる光線結合器34とを備えた光路シフト手段と、投影光学系により投影された映像を撮像するように撮像素子を備え、大型のワーク17であっても正確な形状を測定することができる。
(もっと読む)
走査干渉分光を用いた複雑な表面構造のプロファイリング
【課題】複雑な表面構造を有する対象物の表面トポグラフィおよび/または他の特性を、走査干渉分光法を用いて測定する。
【解決手段】試験対象物の第1の表面箇所に対する走査干渉分光信号から導出可能な情報と試験対象物の複数のモデルに対応する情報とを比較することを含む方法であって、複数のモデルは、試験対象物に対する一連の特性によってパラメータ化される方法。複数のモデルに対応する情報は、試験対象物の各モデルに対応する走査干渉分光信号の変換分(例えば、フーリエ変換分)の少なくとも1つの振幅成分についての情報を含んでもよい。第2の側面では、モデルは固定された表面高さに対応するとともに、固定された表面高さとは異なる一連の特性によってパラメータ化されている。第3の側面では、比較は、走査干渉分光信号の系統的な影響を明確にすることを含む。
(もっと読む)
光学測定システム
光学測定装置は、固定された主軸台(57)が取り付けられた基準支持体(40)、ならびに、固定された主軸台に対向し、および測定される部品を主軸台(57)と心押し台(60)との間で維持するために主軸台(57)に近づいてくる、またはそこから離れて移動するための線形軸(x)に沿って移動可能である、移動可能な心押し台(60)、ならびに線形軸(x)に沿って移動可能な可動式往復台(100)を含むものであって、往復台は、コリメート光束が測定中の部品によって遮られるようにx軸を横切って方向付けるための光源(110)を担持し、往復台は、光源(110)に配列され、および測定中の部品によって遮られなかったコリメート光束の残留光を受けるように配置されている光学検出器(120)を、さらに担持する。測定装置は、光学往復台(100)および心押し台(60)が摺動可能に係合されている基準支持体(40)上に固定されている直線状ガイド(47)を有するのに対し、主軸台(57)は、基準表面上に固定され、少なくとも一部が前記直線状ガイド(47)上に懸下している主軸台担持部(50)上に設置されている。  (もっと読む)
(もっと読む)
画像測定機
【課題】被測定物の三次元形状測定を可能とする画像測定機を提供する。
【解決手段】テーブル1と、撮像光学部10と、これらを相対移動させる相対移動機構50とを有する画像測定機において、撮像光学部10は、前側レンズ12、後側レンズ13およびテレセントリック絞り14を有するテレセントリック光学系11と、このテレセントリック光学系11によって結像された被測定物の画像を撮像するCCDカメラ15とを含んで構成され、レーザ光を用いて、テレセントリック光学系11の光軸上における被測定物表面の光軸方向の位置を非接触で測定するオートフォーカスレーザ変位計部20とを備える。
(もっと読む)
位置検出装置および位置検出方法
【課題】撮像面と撮像対象との位置関係を測定または判定する。
【解決手段】データ表示/センサ装置100は、入力表示画面およびバックライトを有する表示/光センサ部と、入力表示画面に照明光を照射する外部照明部とを備えている。表示/光センサ部は、バックライトからの照明光が撮像対象に反射することによって生じる反射像を含む反射光画像と、外部照明部からの照明光によって生じる撮像対象の影の像を含む影画像とを撮像する。また、データ表示/センサ装置100は、撮像対象から入力表示画面に下ろした垂線の足の位置である反射像位置を反射光画像から算出する反射像位置算出部705と、入力表示画面における上記影の位置を影画像から算出する影像位置算出部706と、反射像位置と影の位置とのずれに基づいて撮像対象の入力表示画面からの距離を算出する距離算出部802とを備えている。
(もっと読む)
検査システム、その方法及びプログラム
【課題】作業スペースと設備投資との問題を解決し、外観検査の自動化を行うことが可能な検査システム及びその方法を提供する。
【解決手段】本発明の検査システムは、固定されておらず、不確定な位置で検査対象の外観を撮像し撮像画像とする撮像装置と、予め検査対象を撮像した参照画像を記憶する記憶部と、撮像装置の撮像座標上の撮像画像を、参照画像を撮像した際の参照撮像座標上に座標変換し、変換した結果を比較画像として出力する画像処理部と、参照画像と比較画像とを比較するマッチング処理部とを備える。
(もっと読む)
検出装置及び検出方法
【課題】検出対象を精度良く検出すること。
【解決手段】検出装置であって、所定の高さから下方に向けて設置されたセンサによって測定された各観測点の位置情報から、検出処理で使用する検出用位置情報を、高さの値に基づいて選択する選択部と、検出対象の形状に基づいて設定された検出対象特徴量を予め記憶する記憶部と、選択された検出用位置情報と、記憶部に記憶される検出対象特徴量とに基づいて、検出用位置情報から検出対象を検出する検出部と、を備える。
(もっと読む)
物体認識方法及び物体認識装置
【課題】予め登録しておくモデルデータのデータ量を抑制しながら、対象物の位置や姿勢を迅速に求めることができる物体認識方法及び物体認識装置を提供する。
【解決手段】距離センサ1により、対象物201を含む所定領域内の各点までの距離計測を行い、三次元物体認識手段3により、これら各点の計測データをメッシュデータ化し、このメッシュデータのグルーピングを行って複数のメッシュグループとし、各メッシュグループの法線ベクトルに垂直な投影平面を作成し、各メッシュグループを対応する投影平面に投影した投影データを求め、投影データの輪郭データを抽出して、輪郭データと対象物の二次元形状データとを比較して、対象物の位置及び姿勢を認識する。
(もっと読む)
露光装置及びデバイス製造方法
【課題】 プレートが搭載されるステージの位置を位置計測系を用いて管理する。
【解決手段】 主制御装置は、所定形状のプレート50が着脱可能に搭載されたステージWSTの位置を位置計測系(18等)を用いて計測しつつ、アライメント系ALGを用いてプレート50の一部を検出するとともに、その検出結果と対応する位置計測系の計測結果とに基づいてプレート50の外周エッジの位置情報を取得する。このため、そのステージWST上に位置計測用のマーク(基準マーク)などが存在しなくても、プレートの外周エッジの位置情報に基づいて、プレート(すなわちステージ)の位置を前記位置計測系で設定される移動座標系上で管理することが可能になる。
(もっと読む)
161 - 180 / 1,007
[ Back to top ]