
Fターム[2F065AA51]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 輪郭 (4,339)
Fターム[2F065AA51]の下位に属するFターム
Fターム[2F065AA51]に分類される特許
101 - 120 / 1,007
画像処理装置
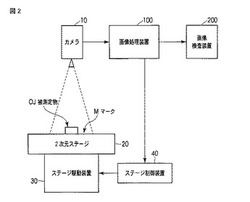
【課題】撮像した画像を高い精度で高解像化することが可能な画像処理装置を提供する。
【解決手段】実施形態によれば、被写体と撮像素子の相対位置を異ならせて撮像した複数の画像を合成して高画素化を行う画像処理装置において、相対位置検出手段と、画像合成手段とを備える。相対位置検出手段は、被写体と標本図形の間の相対的な位置を固定した状態が撮影された複数の画像について、前記標本図形が写る部分を比較して、前記複数の画像間の相対位置を検出する。そして、画像合成手段は、相対位置検出手段が検出した相対位置に基づいて、前記複数の画像を合成するするようにしたものである。
(もっと読む)
溶接ビードの品質検査方法

【課題】溶接ビードの幅方向の位置ずれ量を算出するためのコストを抑えることができる溶接ビードの品質検査方法を提供する。
【解決手段】溶接ビードの品質検査方法は、床小梁との結合部分と端板の溶接ビード側端、溶接ビードの端板との結合部分にそれぞれ影ができるように光を当て、モノクロUSBCCDカメラで撮像する。得られた2つのモノクロ画像データを二値化し、端板の溶接ビード側端に相当する基準線a、溶接ビードの床小梁との結合線b、溶接ビードの端板の結合線cをそれぞれ設定する。次に、双方の結合線b、cの間に中間線dを設定し、基準線aから仮想溶接線eを設定する。そして、仮想溶接線eの垂直方向Yの位置に対する中間線dの垂直方向Yの位置のずれ量Yaを算出する。
(もっと読む)
欠陥寸法測定装置、欠陥寸法測定方法、及びプログラム
【課題】撮像装置の光軸方向に対して高低差がある検査対象の欠陥の寸法を正確に測定する。
【解決手段】平面座標取得部302は、画像データに含まれる検査対象の欠陥を示す画素の平面座標を取得する。空間座標変換部305は、平面座標取得部302が取得した平面座標を、仮想空間に配置された検査対象の外観を表す3次元モデルの表面と平面座標が示す点に対応する仮想空間上の直線との交点を示す空間座標に変換する。仮想寸法算出部307は、空間座標変換部305が変換した複数の空間座標を用いて仮想空間における前記欠陥の寸法を算出する。
(もっと読む)
情報表示用パネルにおける粒子充填量の測定方法
【課題】セル内に直径数μm〜数十μmの粒子群を数層〜数10層に積み上げて充填した場合でも、精度良く粒子充填量の測定を行うことができる情報表示用パネルにおける粒子充填量の測定方法を提供する。
【解決手段】情報表示用パネルにおける粒子充填量の測定方法において、一方の基板1上に隔壁4で仕切って形成したセル7内に配置した粒子群3Bの粒子充填量を測定するにあたり、セル内に充填した粒子群に対し、上部から波長561nm以下のレーザー光を照射し、セル内に充填した粒子群の高さ方向の変位量を測定し、測定した変位量に基づき、セル内に充填した粒子群の充填量を求める。
(もっと読む)
凹部の検査方法と凹部の検査装置
【課題】検査対象物の向きにかかわらず、凹部に存在する突起や付着物などの寸法が許容範囲にあるか否かを短時間で、複数の対象物を連続して検査する。
【解決手段】第一の照明手段13により検査対象物5の第一の面51に略平行に光を照射しながら第一の撮像手段11により検査対象物5の第一の面51を撮像して第一の画像データを生成し、画像処理手段17が、第一の画像データに写っている凹部511の輪郭を抽出して凹部511の位置を特定し、第二の照明手段14により検査対象物5の第一の面51に対して所定の角度をもって傾斜する方向から光を照射しながら第一の撮像手段11により検査対象物5の第一の面51を撮像して第二の画像データを生成し、画像処理手段17が第二の画像データに含まれる凹部511を抽出し、閾値を超える輝度値を有する領域の面積を算出し、面積に基づいて、検査対象物5が良品であるか不良品であるかを判定する。
(もっと読む)
面形状検査装置及び面形状検査方法
【課題】全面走査の誤差を蓄積することなく、被検体の表面形状を精度よく測定することができるようにする。
【解決手段】被検体1における複数の注目領域2のうち、1つの注目領域2が回転中心上に位置するように被検体1が載置され、1つの注目領域2を中心にして、被検体1を回転させる回転台3と、被検体1における複数の注目領域2のいずれかに光を照射する光照射部及び注目領域2に反射された光を検出する光検出部を有する複数の光センサ5とを備える。
(もっと読む)
トロリ線検査装置
【課題】トロリ線の連続したエッジ検出を行うことができるトロリ線検査装置を提供する。
【解決手段】トロリ線検査装置において、トロリ線4を照らす照明3と、前記照明3の両脇に1台ずつ設置してトロリ線4を撮影する左カメラ10及び右カメラ11と、前記左カメラ10及び右カメラ11により撮影した画像中の前記トロリ線4の軌跡の下側のエッジを検出して前記トロリ線4の高さと偏位を測定する画像録画及び画像処理部2とを備えた。
(もっと読む)
撮像装置、画像処理装置、画像処理方法及び画像処理プログラム
【課題】被写体が撮像された画像情報からの被写体の切り抜き処理において、ユーザの熟練度によらず、より高精度な切り抜き処理を可能とする。
【解決手段】被写体画像を撮像により生成する画像カメラ15と、被写体と背景とが含まれる視覚的範囲を画像とした場合の各部に表示されている対象物までの距離を測定し、前記視覚的範囲の画像上の座標と距離とが関連付けられた距離情報を生成する距離カメラ16と、距離情報の座標を被写体画像上の座標に変換して変換済み距離情報を生成する座標変換部101と、変換済み距離情報に含まれる変換後の座標のうち、関連付けられている距離が所定の条件を満たす座標を抽出し、被写体画像のうち、抽出された座標によって特定される領域と他の領域とを分離して出力する画像切り抜き部102とを含む。
(もっと読む)
近赤外線吸収性能の面分布測定方法、及び近赤外線吸収フィルタの製造方法
【課題】近赤外線吸収性能の面均一性を容易に測定できる、近赤外線吸収性能の面分布測定方法と、この測定方法を利用した近赤外線吸収フィルタの製造方法を提供する。
【解決手段】透明基材シート2上に近赤外線は吸収し且つ可視光は吸収しない近赤外線吸収層3を積層した帯状の近赤外線吸収フィルタ1に対して、搬送させながら、その幅方向TD及び流れ方向MDに亘る所定領域面A毎に、近赤外線光源5からの透過光の面分布を、近赤外線領域に感度を有する二次元イメージセンサ5による二次元画像として撮影し、画像処理装置7で画像処理して、その輝度分布から近赤外線吸収性能の面分布を測定し、ディスプレイ8に表示する。更に、判定基準に従い面分布の不良品と良品とをマーキング等で識別できる様にすると良い。この方法を用いて、近赤外線吸収フィルタを製造する。
(もっと読む)
タイヤ外観検査方法及び外観検査装置
【課題】タイヤの外観検査において、タイヤ表面に周期的に形成された領域を撮像画像から除去することが可能なタイヤ外観検査方法及び外観検査装置を提供する。
【解決手段】タイヤ円周方向に沿って撮像されたタイヤ表面の撮像画像に周期的に現れる特定形状を当該撮像画像から検出するステップと、特定形状を除去対象形状としてマスク画像を作成するステップと、特定形状に対してマスク画像が一致するように当該マスク画像を回転するステップとを含むようにした。
(もっと読む)
2光束アッセンブリ及びクロマティックポイントセンサ装置の動作方法
【課題】2つの表面領域を同期測定できるクロマティックポイントセンサ装置(CPS装置)の動作方法を提供すること。
【解決手段】2光束アッセンブリが取り付けられた1光束CPS光学ペンを用いたセンサ装置の第1測定光束および第2測定光束を、それぞれ第1表面領域および第2表面領域に位置合わせする。2つの反射光が2光束CPSの共焦点開口部を通過する。第1測定光束および第2測定光束にそれぞれ起因する第1測定および第2測定を含んだ少なくとも1の測定セットを実行する。様々な位置での測定セットの実行のため、少なくとも第1表面領域を移動させる。各測定結果は、極めて良好な分解能(例えば、少なくとも10nmの分解能)で決定される。本センサ装置と動作方法は、干渉計または他の高額で複雑な構成要素を使わないで、高い分解能と精度を必要とする測定に適用できる。
(もっと読む)
ワーク外形形状検出方法及び画像処理システム
【課題】
安価なモノクロカメラを使用するとともに撮像画像の画像データ処理を少なくして画像処理を高速に行うことができ、撮像時にワークの影が発生してもワーク外形の検出に影の影響を排除することができ、低コストでワーク外形検出方法及び画像処理システムを提供する。
【解決手段】
第1ステップで取得した撮像画像を床面と支持部の中間値の輝度を閾値として二値化し、二値化した画像データをマスクデータにする。支持部の表面の明度と同レベルの明度を有するワークを、支持部に支持した状態でモノクロカメラによりワーク台とともに撮像し、ワーク撮像画像を取得する。ワーク撮像画像から、マスクデータにおける支持部に関する画像領域52,54を消去して支持部消去画像を取得する。支持部消去画像から、支持部消去部分を含んだワーク外形線57を抽出し、支持部消去部分を補間処理してワーク外形線58を取得する。
(もっと読む)
パラメータフィッティング方法
【課題】計算時間を短縮することが可能なパラメータフィッティング方法を提供する。
【解決手段】本発明は遺伝的アルゴリズムを用いて、測定値又は目標値と計算値との間の誤差を表す評価関数値を算出し、前記評価関数を最小化することでパラメータフィッティングを行うパラメータフィッティング方法であって、前記評価関数に所定条件を代入したときに得られる評価関数値に対するボーダー値を定めて、前記評価関数値が前記ボーダー値を超えたときは処理を打切るステップを有することを特徴とする。
(もっと読む)
画像測定装置及び画像測定方法
【課題】操作者の手間が少なく、測定を迅速且つ確実に行うことのできる画像測定装置及び画像測定方法を提供する。
【解決手段】ワークを撮像する撮像ユニット17と、撮像されたワークの画像を取り込む取り込みプログラム431と、取り込まれた画像を2値化する2値化プログラム433と、2値化された画像内に存在する図形情報を認識し、当該図形情報の輪郭線を検出する輪郭線検出プログラム434と、検出された輪郭線に基づいて図形情報の角点を検出する角点検出プログラム436と、検出された角点を含む輪郭線上に、エッジ検出ツールを設定する設定プログラム437と、設定されたエッジ検出ツールにより、図形情報の測定を行う測定プログラム438と、を備える。
(もっと読む)
シート状細胞培養物の品質判定方法およびそのためのシステム、ならびにそれらに適したシート状細胞培養物
【課題】 シート状細胞培養物の品質を、簡便迅速に判定する方法およびシステムを提供する。さらに、本方法に特に適したシート状細胞培養物を提供する。
【解決手段】 シート状細胞培養物を円形に製造し、シート状細胞培養物の輪郭を画像センサーで検出し、輪郭の真円度を求め、真円度によりシート状細胞培養物の品質の判定をおこなう。また、輪郭線を2つの同心の幾何学的円で挟んだとき、同心円の間隔が最小となる場合の、2円の半径の差を外側の同心円半径で除した値が、0.20以下であるシート状細胞培養物を提供する。
(もっと読む)
車両ホイールへのタイヤ着座具合を検査する方法及び装置
【課題】車両ホイールへのタイヤの着座具合を点検する方法及び装置を提供する。
【解決手段】車両ホイール(1)のリム(2)に取り付けられたチューブレスタイヤ(3)の着座具合を点検するため、車両ホイール(1)のリム(2)を回転マウントの中心に締結した状態で車両ホイールを少なくとも1回転、その回転軸線回りに回転させる。ホイールの回転中、リム(2)の半径方向外縁領域及びタイヤ(3)の隣接領域の外側輪郭を距離測定装置によって走査し、リム(2)とタイヤ(3)との軸方向距離の差を検出して評価する。
(もっと読む)
法線ベクトル追跡型超精密形状測定方法
【課題】
計測点の座標と法線ベクトルの計測値から被測定物の表面形状を導出し、各軸の制御方法を工夫することによって各計測点での計測時間を短縮し、被測定物の表面形状測定の高速化と高精度化を図ることが可能な法線ベクトル追跡型超精密形状測定装置における駆動軸制御方法を提供する。
【解決手段】
2軸2組のゴニオメータと1軸の直進ステージの内、2軸1組のゴニオメータと1軸の直進ステージは、QPDからの出力を直接軸駆動モータに入力するフルクローズドフィードバック制御(追従制御)にするとともに、残り2軸1組のゴニオメータはセミクローズドフィードバック制御(定値制御)とし、各軸のエンコーダ出力とQPD出力とを同時に取得し、前記エンコーダ出力から導出する計測点座標と法線ベクトルをQPD出力で補正して、ゴニオメータ制御系の定常偏差の影響を排除する。
(もっと読む)
刃先の検査装置
【課題】チップコンデンサやチップ抵抗、二次電池内部の積層電極用アルミニウム箔の製造等に用いて好適な切断装置の刃物の刃先の検査装置を提供する。
【解決手段】光源20からの光を直立して配されている刃物の側面の第1の研削面11、第2の研削面12、第3の研削面13を横切るように照射しながら移動させる。そして上記刃物に対して側方において、光軸が水平な状態で配されたCCDカメラ22によって各研削面11、12、13からの反射光を検出し、そのピークから反射面の数を、ピークの幅から各研削面の幅を、またピークが現れる角度から研削面の角度をそれぞれ検出する。またCCDカメラ22に取込まれた画像によって、各研削面の表面性状を観察する。
(もっと読む)
形状評価方法
【課題】光制御板に形成された凹凸形状を簡易に評価することが可能な形状評価方法を提供する。
【解決手段】凹凸形状13が形成された第1の面11と当該第1の面11と反対側に位置する第2の面12とを有し、凹凸形状13が第1の方向11に延在しているサンプル光制御板1の凹凸形状13を評価する形状評価方法は、第1の面11から光を入射した場合の第1の全光線透過率Tt1及び第2の面12から光を入射した場合の第2の全光線透過率Tt2の少なくとも一方を用いて規定される指標を凹凸形状13を表す指標とし、サンプル光制御板1に対して、第1及び第2の全光線透過率Tt1,Tt2の少なくとも一方を測定して上記指標を取得する取得工程と、凹凸形状が既知の基準光制御板に対して予め取得した指標と凹凸形状との相関関係に基づき、取得工程で取得した上記指標から、サンプル光制御板1の凹凸形状13を評価する評価工程とを有している。
(もっと読む)
平面形状の測定方法
【課題】適切な平滑化スプライン曲面を高速、かつ短時間で算出する。
【解決手段】3次元スキャナーからなるデータ値計測装置1と、サンプリング測度演算器4、平滑化演算器5および画像処理器6をそなえる計算機2と、処理した画像を表示する出力装置3を有する平面形状測定装置を用いて、被検体表面の平面形状を測定するに際し、平滑化演算器において、座標系(x,y)上に任意に分布するm個のサンプリング点と、各サンプリング点に対応した誤差を含むデータ値から曲面を求めるために平滑化スプライン法を用いるものとし、その際、ハット行列において逆行列計算の必要がない汎関数を極小化する曲面f(x,y)を回帰曲面とする。
(もっと読む)
101 - 120 / 1,007
[ Back to top ]