
Fターム[2F065AA51]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 輪郭 (4,339)
Fターム[2F065AA51]の下位に属するFターム
Fターム[2F065AA51]に分類される特許
21 - 40 / 1,007
測定装置
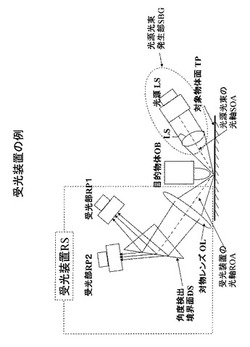
【課題】加工面と加工工具のように、対象物体面に目的物体の先端を精度良く位置決めする位置検出装置を提供する。
【解決手段】対象物体面上の所望の位置に光源光束を合焦させて、その合焦点に目的物体先端を近づけたときに生じる反射光の強度変化と反射光束の光線方向分布の変化を検出し、目的物体を対象物体面に関して高い分解能で接近させ位置決めする。
(もっと読む)
表面形状計測装置

【課題】散乱光の空間分布がマイクロラフネスの差異に応じて、前方/後方/側方と色々な方向に変化することについて配慮し、特にエピタキシャル成長ウェハに出現するステップ・テラス構造は散乱光分布に異方性が生じることに配慮した表面形状計測装置を提供する。
【解決手段】試料1表面に光を照明し、光軸の方向が互いに異なる複数の検出光学系51,52により散乱光の空間分布を検出し、試料1表面の空間周波数スペクトルを算出する。
(もっと読む)
円形状測定方法および装置
【課題】高価な専用装置を用いることなく、平面上の円形パターンをマルチステップ法により高精度に測定できる円形状測定方法および装置を提供する。
【解決手段】円形パターンを有する被測定物Wを載置するテーブル10、テーブルの回転機構20、画像プローブ30、画像プローブを移動させる移動機構40、制御装置50を有する円形状測定装置を準備する。画像プローブを円形パターンの円周に沿って移動させながら、円形パターンの円周を360°/mピッチで測定する工程と、円形パターンの中心を基準に360°/mだけテーブルを回転させて円形パターンの円周上の同一点を測定する測定動作を、360°/mずつテーブルを回転させながら合計m回行ってm個の測定データを取得する工程と、このm個の測定データから円形パターンの形状成分を求める工程を備える。
(もっと読む)
ライト検出装置、ライト検出プログラム、およびライト制御装置
【課題】撮像画像中から他車両のライトを検出するライト検出装置において、車両のライトに類似する特徴を有する光源を識別し、車両のライトを良好に検出する。
【解決手段】ライト制御システム1においては、自車両の周囲を撮像した撮像画像を取得し(S110)、撮像画像中の光源を抽出する(S120)。そして撮像画像中を複数に区分した領域毎に他車両が存在する確度が設定された領域確度マップに基づいて、該光源毎に光源が他車両のライトである確度を表す領域確度を演算する(S150)。また各光源における形状を含む特徴量が車両のライトが有する特徴量と一致する確度に応じて、各光源が他車両のライトである確度を表す特徴確度を演算し(S150)、各光源に対して領域確度および特徴確度に基づく最終確度を演算し、予め設定された閾値以上となる最終確度を有する光源が他車両のライトである旨を出力する(S150,S190)。
(もっと読む)
位置・姿勢推定可能な移動体システム及び自律移動ロボットシステム
【課題】照射するレーザ光の反射光によって周囲の幾何的特徴を識別し、自装置の現在位置・姿勢を推定する際、幾何的特徴に乏しい環境においても確実に位置・姿勢を推定することが可能な移動体システムを提供する。
【解決手段】光学作用部材35を移動経路の棚や壁面等の障害物32に任意な位置と間隔にて取り付け固定する。これにより、移動体10から照射されるレーザ光は、障害物32から距離センサ部12に向けて反射するが、光学作用部材35からは反射光が到達しないため、反射光によって得られる幾何形状データ34に新たな幾何的特徴を生成することができ、移動体10は容易に自装置の現在位置及び姿勢を推定することができる。
(もっと読む)
渦巻きばねの形状を算出するための画像処理装置、方法、及びプログラム
【課題】 渦巻きばねの撮影画像から芯線を正確に抽出する。
【解決手段】 画像処理装置は、渦巻きばねを撮影した撮影画像を入力する画像入力手段と、入力された撮影画像から渦巻きばねの輪郭線を抽出する輪郭線抽出手段と、抽出された輪郭線を極座標変換する座標変換手段と、極座標変換された輪郭線に対して、その輪郭線上を一方向に移動しながら一巡したときの「輪郭線の角座標値列(θ1,θ2,・・,θn)」を取得する角座標値列取得手段と、取得された「輪郭線の角座標値列」を用いて、内フック領域及び外フック領域を特定するフック領域特定手段を有している。
(もっと読む)
かぶりコンクリートの剥落形状計測装置、及び、かぶりコンクリートの剥落形状計測方法
【課題】作業性に優れたかぶりコンクリートの剥落形状計測装置を実現し、実際のかぶりコンクリートの剥落部を現場で計測可能とする。
【解決手段】剥落形状計測装置2は、分解自在で可搬性のあるフレーム部4の天板部10にリニアガイド12を固定し、リニアガイド12の下面に、案内方向と計測方向とが直交するようにして2次元走査可能なレーザ変位センサ5をスライド移動自在に支持する。把持部4を持って測定対象の剥落部32を覆うようにして装置を固定する。その際、リニアガイド12の案内方向が剥落部32の鉄筋30の方向に平行となるようにする。そして、鉄筋30の長手方向に沿ってレーザ変位センサ5の計測位置を移動させては計測することを繰り返して、剥離部32の3次元の形状を計測する。
(もっと読む)
関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラム
【課題】ノイズの影響等を軽減させて、ステレオペアの相関関数を精度良く算出することができる関数算出装置、デプスマップ生成装置、関数算出方法及び関数算出プログラムを提供する。
【解決手段】関数算出装置110は、参照視点画像及び複数の近傍視点画像を受信する正規化部111と、参照視点画像及び近傍視点画像をステレオペア毎に平行化する正規化部111と、平行化したステレオペアの視差を正規化する正規化部111と、視差を正規化したステレオペアの参照視点画像及び近傍視点画像に、マッチングウィンドウを定めるウィンドウ設定部112と、マッチングウィンドウ間の1次元POC関数を、視差を正規化したステレオペア毎に算出する関数算出部113と、1次元POC関数のうち、相関ピークの高さが閾値以上である1次元POC関数を統合する関数統合部114と、を備える。
(もっと読む)
農産物の体積測定装置
【課題】農産物の体積を高速且つ高精度に測定できるようにする。
【解決手段】塊状の測定対象農産物7の表面上に設定方向に延びる線状の輝線6を形成する光線を照射する光線投射手段2と、輝線6を撮像する撮像手段1と、輝線6を、測定対象農産物7上で、輝線6の方向と交差する方向に移動させる輝線移動手段BMとが備えられて農産物の体積測定装置が構成され、移動される輝線6の移動途中の各位置において、輝線6の位置情報によって得られる測定対象農産物7の外形形状と、測定対象農産物7上の輝線の両端位置の夫々から前記光線の入射側と反対側へ伸ばした線を測定対象農産物7の外形形状とみなしたみなし外形形状とに基づいて特定される面積の少なくとも一部に対して補正係数を乗算することによって補正し、前記移動途中の各位置での補正後の面積に基づいて測定対象農産物7の体積を求める。
(もっと読む)
溶接位置の検査方法及びその装置
【課題】
簡単な構成を用いて検査範囲の照度を均一化して検査領域を広範囲とし、溶接部の円形輪郭の全周を抽出し高精度に溶接部の位置を検出することで、所望の位置に溶接が施されているかを検査すること。
【解決手段】
本発明は、上記課題を解決するために、検査対象表面の2次元検査領域に対して傾斜した角度で異なる少なくとも2方向から前記2次元検査領域を照明すると共に、該2次元検査領域に対向した位置から前記異なる少なくとも2方向から照明された複数の画像を取得し、該複数の取得した画像から溶接部のくぼみ傾斜部分に対応する輪郭情報をそれぞれ抽出し、該抽出した複数の輪郭情報を合成することで円形の輪郭を得、該円形の輪郭に円を当てはめて前記溶接部として認識し、該溶接部として認識した円の中心座標を溶接位置とすることを特徴とする。
(もっと読む)
変位センサシステム、センサ用コントローラ及び表示制御プログラム
【課題】複数の測定対象物それぞれの形状に応じた波形の比較を、作業者に簡易且つ正確にさせることが可能な技術を開示する。
【解決手段】変位センサシステム10は、変位センサ11、表示画面33Aを有する表示部33、制御回路30を備え、制御回路30は、変位センサ11から出力された測定信号SG3に基づき、複数のワークWそれぞれの形状に対応した複数の信号波形V1〜V4それぞれについて当該信号波形のうち基準レベルを示す部位である基準部位X1〜X4を抽出する抽出処理と、当該抽出処理で抽出された基準部位X1〜X4同士を一致させた状態で、複数の信号波形V1〜Vを表示画面33Aに表示させる表示処理とを実行する。
(もっと読む)
裁断対象検査装置、裁断対象検査方法、裁断対象検査装置用のプログラム、および、裁断対象検査システム
【課題】多段積みされた裁断対象を精度良く検査できる裁断対象検査装置等を提供する。
【解決手段】多段積みされた裁断対象Bkを検査する裁断対象検査装置において、所定形状のレーザ光L1、L2が投影された裁断対象の画像データを取得し(S7)、画像データからレーザ光が投影された部分の画像を抽出し、抽出されたレーザ光の画像からレーザ光の投影形状の情報を算出し(S8)、所定形状の情報と投影形状の情報とに基づき、多段積みされた裁断対象の良否を判定する(S11)。
(もっと読む)
外径測定装置及びこれを用いた外径測定方法
【課題】ホース用継手金具の軸心方向任意位置における外径を迅速かつ高精度に測定する。
【解決手段】外径測定装置1は、ブレーキホース用継手金具30の軸心C1方向と直交する直径方向に互いに対向して配設される一対の二次元レーザ式第1変位センサ6と、ブレーキホース用継手金具30の形状を測定する二次元レーザ式第2変位センサと、ブレーキホース用継手金具30を軸心C1方向に移動させるマイクロメータヘッド8(移動手段)と、を備える。一対の二次元レーザ式第1変位センサ6は、軸心C1方向に直交する平面である第1平面における、ブレーキホース用継手金具30の形状及び外径寸法を測定可能である。二次元レーザ式第2変位センサ7は、ブレーキホース用継手金具30の軸心C1を含む平面である第2平面における、ブレーキホース用継手金具30の形状を測定可能である。
(もっと読む)
研削工具の砥面検査システム及び方法
【課題】砥粒の状態を新たな解析パラメータを用いてより詳しく解析し、これにより砥面の状態をさらに正確に検査できるようにする。
【解決手段】カメラ6により砥石3の砥面を撮像してそのライン画像データを取り込み、各ライン画像データに対し砥粒抽出処理部123により複数種のフィルタリング処理を行うことで上記ライン画像データから砥粒切れ刃候補の画像を抽出する。そして、砥粒解析処理部124の制御の下で、上記抽出された各砥粒切れ刃候補の画像から、砥面全域における各砥粒切れ刃候補の重心の座標と、凸多角形近似データ及び円形度と、内部欠損及び外部欠損と、面積及び欠損度と、すくい角側の稜線形状をそれぞれ算出または検出する。そして、この得られた解析パラメータをもとに、砥石3の幅方向における砥粒分布ヒストグラムと、砥石3の砥面全域における砥粒の分布状態を表す三次元マップを生成する。
(もっと読む)
孔形状検査方法および孔形状検査プログラム
【課題】被検出形状に縁部における輝度変化を除去し、欠けや異物の検出を確実に行える孔形状検査方法および孔形状検査プログラムを提供する。
【解決手段】孔形状良否を判定する孔形状検査方法およびプログラムであって、前記孔の孔形状撮像工程と、前記孔形状画像の2値化画像形成工程と、前記孔の面積が既定値であるかを判定する孔面積判定工程と、前記孔の内形状の孔重心を求める孔重心演算工程と、前記孔形状画像に前記孔重心を中心とする同心フィルターをかけ、前記孔重心を中心とする同心形状上の画素の平均輝度と、1画素の画素輝度と、の差によるフィルタリング画像形成工程と、前記フィルタリング画像の2値化フィルタリング画像形成工程とを有し、前記2値化フィルタリング画像の画素数が所定の値以下である場合、前記孔を良品と判定する良否判定工程を有する孔形状検査方法、およびその検査方法をコンピューターに実行させるプログラム。
(もっと読む)
ボトル缶のねじ部検査装置
【課題】ボトル缶のねじ部を正確かつ短時間で検査する。
【解決手段】ライナー付キャップを被嵌するために開口端を外方へ向かってカールさせたカール部1とカール部1の下方でキャップをねじ嵌合するねじ部2とからなる口金部3を有するボトル缶4を缶軸Xまわりに回転させながら、口金部3の一部を含むように設定された撮像エリアを撮像して口金部3におけるねじ部2の形状を検査する装置であって、ボトル缶4を保持して缶軸まわりに回転させる回転手段21と、撮像エリア内のボトル缶4のねじ部2に半径方向外方かつ缶軸方向下方から斜め上向きに照明光Aを照射するねじ部照明手段22と、撮像エリアにおける照明光Aの反射光A´を含む検査画像を連続的に取得する撮像手段24と、反射光A´の撮像結果に基づきねじ部2のねじ始まり部を検出し、ねじ始まり部を含むねじ部2の検査を行うねじ部検査手段25とを備える。
(もっと読む)
錠剤検査装置及びPTP包装機
【課題】錠剤の変更にも柔軟かつ円滑に対応することができ、しかも検査精度の飛躍的な向上を図ることのできる錠剤検査装置及びPTP包装機を提供する。
【解決手段】錠剤検査装置21は、容器フィルムのポケット部に収容された錠剤に対し光を照射可能な照明装置22と、照明された範囲内の錠剤を撮像可能なカメラ23と、カメラ23から出力される画像信号を処理する画像処理装置24とを備える。画像処理装置24は、画像データに基づき錠剤の輪郭を抽出し、輪郭上における第1の所定点及び第2の所定点の接線の向き情報を演算するとともに、第1及び第2の所定点で挟まれた第3の所定点の接線の向き情報を求め、第3の所定点の接線の向き情報が、第1の所定点の接線の向き情報及び第2の所定点の接線の向き情報に基づく許容範囲を逸脱している場合に、当該第3の所定点に関し不良候補として判定する。
(もっと読む)
形状測定装置
【課題】帯状体の顕在化形状を、幅方向の分解能を高めて検出可能な形状測定装置を提供する。
【解決手段】被測定物体1の搬送方向に平行な直線と垂直の平面内に配置され、平面内の被測定物体1表面の幅方向へスリット状の光を照射するスリット光光源2と、平面と垂直な平面でかつ被測定物体1の表面に垂直な平面を介してスリット光光源2と反対側に配置され、被測定物体1上のスリット状の光を撮像する撮像装置3とを備えた。また、被測定物体1の幅方向に沿い被測定物体1に外力を印加する外力印加装置14を設け、潜在形状演算器40を備えた。
(もっと読む)
面形状計測装置
【課題】被検面の形状を高精度に計測する。
【解決手段】被検面10の形状を計測する面形状計測装置であって、光源1からの光を参照光と被検光とに分割して被検光を被検面10に照射する計測ヘッド110と、計測ヘッド110を収納する収納部と、光源1からの光を計測ヘッド110へ入射させ、被検面10に対する被検光の入射角度を変える変更部120と、被検面10で反射され計測ヘッド110に戻ってくる被検光と参照光との干渉光を検出する検出部と、計測ヘッド110の位置を計測する位置計測部116−118と、検出結果および計測結果を用いて被検面10の形状を求める処理部9とを備え、変更部120は、光源1からの光を計測ヘッド110の収納部の外側から計測ヘッド110に入射させ、光源1からの光が計測ヘッド110に入射する位置を変えることによって入射角度を変える。
(もっと読む)
投影装置およびその方法、並びに投影装置を用いた形状認識装置およびその方法
【課題】配置の制約が少なく、かつ照度不足および照度ムラが生じにくい投影装置を提供する。
【解決手段】撮像部の撮像対象物に対して光を投影する投影装置200であって、放射する光の波長帯が互いに異なる赤色LED240R、緑色LED240Gおよび青色LED240Bと、撮像対象物の特性に基づき、各LEDが放射する光の光量を制御する投影制御部230と、複数のLEDから放射される光を、同一の光軸上に導くことにより、撮像対象物に対して光を投影するリレー部250とを備える。
(もっと読む)
21 - 40 / 1,007
[ Back to top ]