
Fターム[2F065AA51]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 輪郭 (4,339)
Fターム[2F065AA51]の下位に属するFターム
Fターム[2F065AA51]に分類される特許
61 - 80 / 1,007
3次元計測方法
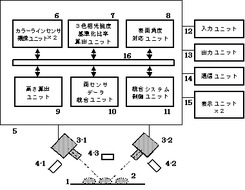
【課題】平面精度が低い基板上に生成された、直径数十ミクロン程度のサイズのバンプの3次元計測を可能とする。
【解決手段】測定対象に固有の傾斜角で固有の色相光を投光し、固有の傾斜角で傾斜した視軸のカラーラインセンサカメラで撮像し、得られた画像画素の色相光反射強度基準化比率から、測定対象の表面パッチ傾斜角を算出し、表面パッチ傾斜角から表面パッチの高さを算出する3次元計測法において、まず光拡散表面を有する球状モデルを対象として、色相光反射強度基準化比率と表面傾斜角の対応表を作成し、未知の測定対象を撮像した画像画素の色相光反射強度基準化比率から表面パッチの傾斜角を算出し、傾斜角から表面パッチの高さを算出し、これをスキャン方向に沿って加算して縦断面高さデータを算出し、縦断面高さデータを対象横幅に亘って集積して、未知の測定対象の3次元計測を行う。
(もっと読む)
グリーンタイヤのキャップトレッドのオフセットを測定する測定方法、測定装置及び測定プログラム

【課題】グリーンタイヤのキャップトレッドのセンターオフセット位置を自動で検出する。
【解決手段】グリーンタイヤのキャップトレッドのオフセット測定方法であって、回転自在なドラム上に載置されたグリーンタイヤの形状を計測する工程と、計測結果に基づきグリーンタイヤの基準高さhを算出する工程と、基準高さhにおけるキャップトレッドの幅をセリアル側及び反セリアル側で算出する工程と、算出したキャップトレッドの幅に基づきキャップトレッドのセンターオフセットの異常を判断する工程と、を有する。
(もっと読む)
しわ発生判別方法、プログラム、速度計測装置、形状計測装置、しわ発生判別装置及び画像形成装置
【課題】幅広いシート材種に対してシート材のしわ発生の余裕度を評価し、しわの発生を予防する技術を提供する。
【解決手段】波打ち形状算出手段が、ニップ部におけるシート材の搬送方向と直行する方向の搬送速度分布を記憶手段から読み出して(S1)、搬送速度分布からシート材の波打ち形状を算出し(S2)、しわ発生判別手段が、波打ち形状算出手段により算出された波打ち形状に基づいてシート材にしわが発生するか否かを判断する(S3、S6、S7)。
(もっと読む)
電子カメラ、画像表示装置、プログラム及び記録媒体
【課題】 本発明は、装置が大型化せず、簡単な構成でサイズ情報を容易に取得し、そのサイズ情報を記録用画像に関連付ける手段を提供する。
【解決手段】 電子カメラは、撮像部と、認識部と、選択部と、第1算出部と、第2算出部と、記録処理部とを備える。撮像部は、撮影光学系を介して被写体の像を撮像する。認識部は、撮像部が生成する第1画像から主要被写体を認識する。選択部は、主要被写体に応じた複数の測定点を選択する。第1算出部は、選択部が選択した測定点ごとに、各々の測定点に対し距離を算出する。第2算出部は、第1算出部が算出した各々の距離に応じて主要被写体の大きさを示すサイズ情報を算出する。記録処理部は、撮像部が生成する記録用の第2画像とサイズ情報とを関連付けてメモリに記録する。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】3次元部品7を対象とする3次元画像形成において、走査光の計測対象面からの反射光の受光位置を検出する位置検出部を、受光面の計測対象面に対する傾斜角度が相異なる第1PSD25A、第2PSD25Bを有する構成とし、第1PSD25A、第2PSD25Bがそれぞれ受光した光量のうち大きい方の光量が所定の範囲を超えたとデータ処理部15aの受光量判定部によって判定されたならば、当該走査部位についての受光位置検出結果として小さい方の光量に基づく受光位置検出結果を採用して3次元認識画像を形成する。これにより、受光した光量が過大である場合に生じるノイズを排除することができ、安定した3次元認識画像を形成して正しい部品認識結果を得ることができる。
(もっと読む)
ワイヤーボンドの三次元位置決め方法及び装置
【課題】微小径ワイヤーボンドの接合状態の良否検査に先立ち、当該ワイヤーボンドの三次元的位置決めを迅速且つ精確に行うことができるワイヤーボンドの三次元位置決め方法及び装置を提供することを課題とする。
【解決手段】カメラ5とラインレーザー3、4を用いて、可動ステージ2上に載置されたワイヤーボンド1の三次元位置決めを行うための方法であって、 ラインレーザー3、4を、カメラ5の向きに対して角度を持たせて配置することにより、照射されたレーザーラインがワイヤーボンド照射部分において他の照射部分と一直線状にならないようにし、カメラ5で取り込んだレーザーラインが照射された状態のワイヤーボンド1の画像データにおいて、ワイヤーボンド1上におけるレーザーラインの位置と基準位置とのずれとラインレーザーの傾斜角度とから演算して求めた数値を基に、可動ステージ2を移動制御する
(もっと読む)
位置姿勢測定装置および3次元形状測定装置
【課題】3次元形状測定装置の撮像装置や接触子のように、3次元形状の測定に必要であり、かつ、その位置や姿勢が測定データに大きく影響する器具等の位置や姿勢を正確かつ簡便に測定できるようにする。
【解決手段】位置姿勢測定装置は、例えば、互いに直角をなす線状の第1、第2の像19A、19Bをそれぞれ結ぶレーザー光を利用するものであり、第1、第2の像19A、19Bと交差することで、レーザー光を反射して特定の方向に向かわせる反射具11を備える。また、反射具11は、再帰性反射材により設けられた3つの反射部23a〜23cを有し、反射部23a〜23cは、3角形の頂点を占めるように、かつ、反射されるレーザー光の光量が互いに異なるように設けられている。これにより、球面座標系を利用して撮像装置等の位置および姿勢を正確に測定することができる。
(もっと読む)
タイヤ形状計測方法及びタイヤ形状計測装置
【課題】タイヤが走行しているときの接地形状及び接地面近傍を含むタイヤの表面形状を精度よく計測する。
【解決手段】タイヤTを路面11の走行路11aを構成する透明な強化ガラス板G上に接地させるとともに、強化ガラス板Gの表面に設けられた路面プールに白色の液体Lを投入し、移動機構163のボールねじ163aを回転させて路面11を保持するガイド部材162をガイドレール161に沿って前後方向に移動させながら、強化ガラス板GのタイヤTが接地する側とは反対側に設けられたCCDカメラ14により液体L中を走行するタイヤTの形状を撮影し、この撮影された画像からタイヤTの形状を計測するようにした。
(もっと読む)
作業内容測定装置及び作業管理装置
【課題】より高精度の作業内容の測定を実現すると同時に、低コストかつ環境負荷の少ない作業内容測定装置及び作業管理装置を提供する。
【解決手段】作業者及び当該作業者により作業される作業対象の画像に基づいて作業者及び作業対象に係る情報を取得し、かつ、作業対象または当該作業対象とつながった物体に設けられた第1センサーにて自己検出された、当該第1センサーの空間的位置に係る情報を取得し、作業者及び作業対象に係る情報と、第1センサーの空間的位置に係る情報とを統合することで、作業内容の測定結果を示す第1統合情報を生成する作業内容測定装置であって、作業者の一部に設けられた第2センサーにて自己検出された、当該第2センサーの空間的位置に係る情報を取得し、第1統合情報に対し、第2センサーの空間的位置に係る情報をさらに統合することで第2統合情報を生成し、第2統合情報を作業内容の測定結果として出力する。
(もっと読む)
物流システムにおける自動計測装置
【課題】大量の輸送貨物量の発生する現代社会および今後において、物流の自動化、システム化はますます重要になっている。物流システムの効率化、コストダウンにおいて形状、寸法、重量、温度、色、模様などの物性、個別認識情報の一括計測、情報管理が自動化、システム化の要件であるが高速、軽量簡便な計測センサーを実現させ合理化を進める。
【解決手段】形状寸法計測センサーとしてCCDカメラ120〜122を利用し、重量計109その他のセンサー、装置を併用して形状、寸法、物性、個別管理情報の一括計測を可能にし、物流の自動化システム化を計る。
(もっと読む)
三次元画像取得装置および三次元画像取得方法
【課題】光軸に垂直な面内方向の分解能を容易に変更することができる三次元画像取得装置および三次元画像取得方法を提供する。
【解決手段】本発明の一実施形態に係る三次元画像取得装置10は、対物レンズ13の被計測体側共役点の位置と被計測体15の位置とのXY方向の相対的な位置関係を変更するよう載置台16をXY方向に変位させる載置台変位部22を有する。また、三次元画像取得装置10は、載置台変位部22および現在の載置台16の位置における被計測体15の高さを決定する高さ決定部54を制御することにより、載置台16の初期位置と、載置台16を初期位置からXY方向に被計測体側共役点の互いの離間距離より小さい距離移動させた1または複数の補間位置と、のそれぞれの位置での被計測体側共役点における被計測体15の高さの情報からなる被計測体15の三次元形状情報を取得する形状情報取得部55を有する。補間位置は、複数の補間位置パターンのうちの1つが選択されて決定される。
(もっと読む)
光学分光システムを使用するパラメトリック・プロフィーリング
【課題】回折格子の形状特徴物などの小寸法の形状特徴物のプロフィールを見出すためのシステムを提供する。
【解決手段】シード・プロフィールのギャラリが作られ、半導体装置についての製造プロセス情報を用いて該プロフィールに関連する初期パラメータ値が選択される。回折構造および関連するフィルムを測定するとき、反射率Rs,Rpなどのいろいろな放射パラメータおよび楕円偏光パラメータを使用することができる。放射パラメータのうちのあるものは、該プロフィールまたは該フィルムのパラメータ値の変化に対してより敏感な1つ以上の放射パラメータを選択してより精密な測定に到達することができる。プロフィール・パラメータのエラーを補正するために上述した手法をトラック/ステッパおよびエッチャに供給してリソグラフィおよびエッチングのプロセスを制御することができる。
(もっと読む)
形状測定装置
【課題】被測定物体を計測中に、被測定物体が計測可能範囲にあるか否かを容易に確認することができる形状測定装置を提供する。
【解決手段】形状測定装置が、被測定物体に計測光を照射する光源41と、光源41からの計測光が被測定物体に照射されたことにより生じる像を検出する光検出部44と、光検出部44からの検出出力に基づいて被測定物体の形状を検出する形状検出部24と、被測定物体の位置が、光検出部44で被測定物体の像が検出できる計測可能範囲から外れているか否かを判定する計測可能範囲判定部31と、計測可能範囲判定部31による判定出力に基づいて、計測光の波長とは異なる波長の指示光を照射する指示光発光部とを備える。
(もっと読む)
空席判定装置、及び、空席判定方法
【課題】乗員の体格や姿勢等に拘わらずシート上の乗員の存否を正確に判定することのできる空席判定装置、及び、空席判定方法を提供する。
【解決手段】距離画像データを取得する距離画像センサ4を設ける。取得したデータを直交座標画像と平面投影二値画像に変換するデータ変換手段40と、変換した画像を基にシートバック位置とシートクッションの位置を推定する位置推定手段25,26を設ける。さらに、シート以外の物体が存在することを意味する特徴量が、直交座標画像や平面投影二値画像のシートバックとシートクッションの各推定位置に含まれるか否かを判定する物体存否判定手段27,28を設ける。両物体存否判定手段27,28がともに特徴量が含まれていないものと判定したときに空席と判定する最終判定手段29を設ける。
(もっと読む)
被写体位置計測装置、ディスプレイシステム、および被写体位置計測方法
【課題】被写体位置計測装置および被写体位置計測方法において、撮影人物の頭部等の被写体の一部分の位置を求める際、簡単な方式で上記一部分の位置を安定して求める。
【解決手段】被写体の一部分を球状体と見なして前記一部分の位置を求める。具体的には、装置は、少なくとも2方向からカメラを用いて撮影した被写体の前記一部分の画像のそれぞれにおいて、画像中の前記被写体の輪郭像を抽出する。さらに、前記輪郭像と前記画像中の第1の方向に延びる探索直線とが接する接点位置情報を求めることにより、撮影空間内において、前記カメラから延びて被写体の前記一部分と接する第1仮想直線を前記輪郭像のそれぞれについて求める。さらに、前記撮影空間において、前記第1仮想直線を前記第1の方向に対応する方向に所定の距離それぞれ平行移動した第2仮想直線同士の交点または前記第2仮想直線同士が最接近する点の位置を、前記一部分の中心位置として求める。
(もっと読む)
物体のサイズ検査方法
【課題】信頼性が高く、簡易で日常的な検査に適した物体のサイズ検査方法を提供する。
【解決手段】物体の二次元形状が二次元空間である所定長さのスリットを通過するか否かにより、物体のサイズを検査する。物体を撮像して画像データを取得し、画像データを二値化処理し、二値化処理した二値画像に基づいて物体に対応する画素の連結領域を特定し、画素の連結領域において輪郭構成画素を順次特定し、輪郭構成画素の一つを起点として、第一の点は第一の方向に移動させ、第二の点は第二の方向に移動させるとともに第一の点との直線距離がスリットの所定長さである規定値以上となる場合にのみ第一の方向に移動させ、第一の点が輪郭構成画素を一巡し起点となる画素に戻るまでの間に、輪郭構成画素のすべてを、第一の点と第二の点の少なくともいずれかが通過した状態で該第一の点と第二の点とが一致することで、物体の二次元形状がスリットを通過するものと判断する。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
対象物検出装置及び方法
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
形状測定装置
【課題】高い精度で、微細加工処理が施された基板上のパタン形状ならび欠陥を測定することが可能な形状測定装置を提供する。
【解決手段】本発明は、反射型サンプル基板2上の被検パタン領域に対し、空間領域及び/又は時間領域でのコヒーレントな光を、照射位置をシフトさせながら複数回照射する照射部10と、照射部10により照射された被検パタン領域からの回折光を受光する撮像素子15と、撮像素子15による受光結果である画像情報を記録する記録部16aと、記録部16aに記録された画像情報から、反復計算により演算に最適な照明形状を導出し、記録部16aに記録された画像情報のうち、導出された照明形状を用いて、実波長でのパタン形状ならび欠陥を抽出する測定処理部16とを備える。
(もっと読む)
輪郭線検出方法及び輪郭線検出装置
【課題】背景面が光を散乱するものであり、特にワークの高さが低い場合であっても、ワークの輪郭を明確に検出できる輪郭線検出方法及び輪郭線検出装置を提供する
【解決手段】ワークWからの光を光検出部5で検出することにより、前記ワークWの輪郭線を検出する輪郭線検出方法であって、前記光検出部5を設ける位置を前記ワークWの上方に設定し、光射出部2から射出される照明光が実質的に、前記ワークWの少なくとも一部の輪郭線である検出対象輪郭線から外側へ所定距離離間した位置を内縁とする、又は前記検出対象輪郭線から内側へ所定距離離間した位置を外縁とする光照射領域7にのみ照射されるように設定しており、前記光照射領域7が、前記検出対象輪郭線よりも下方であるとともに照明光が散乱される面上に形成されるように設定した。
(もっと読む)
61 - 80 / 1,007
[ Back to top ]