
Fターム[2F065AA58]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 面積 (431)
Fターム[2F065AA58]に分類される特許
61 - 80 / 431
三次元形状測定装置、三次元形状測定方法、構造物の製造方法および構造物製造システム
【課題】計測時間を短縮化でき、装置構成が複雑化することを防ぐ。
【解決手段】三次元形状測定装置1は、測定対象物11上に投影パターンを照射する投影部13と、測定対象物11を撮像する撮像部14と、投影部13に縞パターンを照射させ、照射させる縞パターンの位相を変化させながら、撮像部14に測定対象物11を繰り返し撮像させるとともに、測定対象物11上に照射させた縞パターンの画像を複数取得する第1の制御部と、第1の領域のみに所定の光を照射させて撮像した第1の画像と、第2の領域のみに所定の光を照射させて撮像した第2の画像とを取得する第2の制御部と、第1の画像と第2の画像との差分に基づいて、縞パターンに含まれる縞の夫々を識別する基準線を検出する基準線検出部と、基準線に基づいて、測定対象物11の三次元形状を測定する形状測定部と、を備える。
(もっと読む)
破断面判定方法および破断面判定装置

【課題】互いに噛み合う破断面の噛み合わせを判定する。
【解決手段】各破断面の表面形状データ(X座標値,Y座標値,Z座標値)が測定される(ステップS10)。続いて、表面形状データに基づき各破断面上に複数の基準点が設定され(ステップS11)、設定された基準点から3点を選択した後に、この3つの基準点を含む仮基準面が設定される(ステップS12)。続いて、対向する仮基準面の一致状態が判定され(ステップS14)、仮基準面が一致している場合には仮基準面が基準面として設定される(ステップS15)。次いで、基準面を基準として表面形状データが比較データに変換され(ステップS18)、この比較データに基づいて各破断面における欠け等の発生状況が判定される(ステップS19)。そして、欠け等の面積に基づいて破断面の噛み合わせが判定される(ステップS20)。
(もっと読む)
情報表示用パネルにおける粒子充填量の測定方法
【課題】セル内に直径数μm〜数十μmの粒子群を数層〜数10層に積み上げて充填した場合でも、精度良く粒子充填量の測定を行うことができる情報表示用パネルにおける粒子充填量の測定方法を提供する。
【解決手段】情報表示用パネルにおける粒子充填量の測定方法において、一方の基板1上に隔壁4で仕切って形成したセル7内に配置した粒子群3Bの粒子充填量を測定するにあたり、セル内に充填した粒子群に対し、上部から波長561nm以下のレーザー光を照射し、セル内に充填した粒子群の高さ方向の変位量を測定し、測定した変位量に基づき、セル内に充填した粒子群の充填量を求める。
(もっと読む)
レーザ測距装置
【課題】簡単な測定作業で任意の多角形の面積を非接触で測定することの可能なレーザ測距装置を提供する。
【解決手段】レーザ測距装置1は、測定対象物10上の任意の多角形の面積を非接触で測定するレーザレーダ方式の測距装置である。2次元スキャナ3は、レーザダイオード2からのレーザ光を偏向させて測定対象物10上の任意の多角形の頂点A,B,…を照射する。フォトダイオード6は、各頂点A,B,…で反射したレーザ光を受光して信号を出力する。演算制御部7は、フォトダイオード6からの出力信号と2次元スキャナ3の動作情報を用いて多角形の面積を算出する。2次元スキャナ3は、測定対象となる多角形をレーザ光の2次元走査により描画表示する。
(もっと読む)
撮影対象サイズ推定装置及び撮影対象サイズ推定方法並びにそのプログラム
【課題】撮影画像に写っている撮影対象のサイズを簡易な方法で推定することのできる撮影対象サイズ推定装置を提供する。
【解決手段】撮影画像に写っている撮影対象の所望の算出対象サイズを表す算出対象画素の前記撮影画像内において占める画素数を検出する。また、撮影画像内において算出対象画素が占める画素数の代表値により、撮影対象の実空間上での算出対象サイズの代表値を除して、撮影画像内の1画素の実空間上におけるサイズの代表値を算出し、その値に、撮影対象の算出対象画素が撮影画像内において占める画素数を乗じることにより、撮影画像内に写っている撮影対象における算出対象サイズの実空間上のサイズを算出する。
(もっと読む)
凹部の検査方法と凹部の検査装置
【課題】検査対象物の向きにかかわらず、凹部に存在する突起や付着物などの寸法が許容範囲にあるか否かを短時間で、複数の対象物を連続して検査する。
【解決手段】第一の照明手段13により検査対象物5の第一の面51に略平行に光を照射しながら第一の撮像手段11により検査対象物5の第一の面51を撮像して第一の画像データを生成し、画像処理手段17が、第一の画像データに写っている凹部511の輪郭を抽出して凹部511の位置を特定し、第二の照明手段14により検査対象物5の第一の面51に対して所定の角度をもって傾斜する方向から光を照射しながら第一の撮像手段11により検査対象物5の第一の面51を撮像して第二の画像データを生成し、画像処理手段17が第二の画像データに含まれる凹部511を抽出し、閾値を超える輝度値を有する領域の面積を算出し、面積に基づいて、検査対象物5が良品であるか不良品であるかを判定する。
(もっと読む)
樹脂製キャップ内部品の検査装置および樹脂製キャップ内部品の検査方法
【課題】 樹脂製キャップに収容された部品の位置や形状を明確に把握することができるような樹脂製キャップ内部品の検査装置および樹脂製キャップ内部品の検査方法を提供する。
【解決手段】 照明手段32がカメラ31の撮像方向とは異なる方向から樹脂製キャップ20の外面に光を照射し、カメラ31が樹脂製キャップ20の開口部201側から樹脂製キャップ20内部の画像をカラーで取り込むので、アルミシール22からの反射光をカメラ31が取り込むのを回避でき、明確な画像を得ることができる。そして、画像処理手段33が、カメラ31により明確に取り込まれたカラー画像を2値化して内蓋21の外形および注ぎ穴211の形状を検出するので、樹脂製キャップ20に収容された部品の位置や形状を明確に把握することができる。
(もっと読む)
近赤外線吸収性能の面分布測定方法、及び近赤外線吸収フィルタの製造方法
【課題】近赤外線吸収性能の面均一性を容易に測定できる、近赤外線吸収性能の面分布測定方法と、この測定方法を利用した近赤外線吸収フィルタの製造方法を提供する。
【解決手段】透明基材シート2上に近赤外線は吸収し且つ可視光は吸収しない近赤外線吸収層3を積層した帯状の近赤外線吸収フィルタ1に対して、搬送させながら、その幅方向TD及び流れ方向MDに亘る所定領域面A毎に、近赤外線光源5からの透過光の面分布を、近赤外線領域に感度を有する二次元イメージセンサ5による二次元画像として撮影し、画像処理装置7で画像処理して、その輝度分布から近赤外線吸収性能の面分布を測定し、ディスプレイ8に表示する。更に、判定基準に従い面分布の不良品と良品とをマーキング等で識別できる様にすると良い。この方法を用いて、近赤外線吸収フィルタを製造する。
(もっと読む)
形状検査装置及び形状検査方法
【課題】一度のスリット光の走査により、任意の断面線における断面形状を検査することができる形状検査装置及び形状検査方法を提供する。
【解決手段】撮像光学系12を用いて被検査物20の形状を検査する形状検査装置10であって、被検査物20にスリット光を投射する投射手段13と、スリット光の走査により被検査物20上に順次形成される形状線を撮像する撮像手段14と、順次形成された各形状線の撮像データに基いて、被検査物20の三次元形状を点群データとして取得する点群データ取得手段と、点群データに基いて表示された被検査物に、入力に応じて切断線を設定する切断線設定手段と、切断線に対応した点群データにより、切断線における被検査物20の断面形状を算出する断面形状算出手段とを備えている。
(もっと読む)
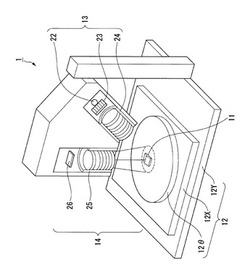
光センサー
【課題】光センサーの光学系において、1/4波長板が高温、高熱の使用条件下でも安定して確実に直線偏光を円偏光に変換でき、良好なセンサー感度、高いセンサー精度を確保維持する。
【解決手段】振動検出用光センサー1は、直線偏光のレーザー光を出力する光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5、及び振動板8からの反射光を検出する光検出器6を備える。波長板ユニットは、1/4波長板7と振動板とが一体化されている。1/4波長板は、一方の主面に一方向に周期的な凹凸形状9aを有する透明基板9と、透明基板と同じ周期的な凹凸形状を有しかつ屈折率の異なる2種類の誘電体薄膜10a,10bを交互に積層した光学多層膜である周期構造体10とからなるフォトニック結晶構造の波長板である。
(もっと読む)
光センサー
【課題】光センサーの光学系において光源光の使用波長が変動しても、1/4波長板が確実に直線偏光を円偏光に変換して、良好なセンサー感度を確保維持する。
【解決手段】振動検出用光センサー1は光源2、偏光ビームスプリッター3、対物レンズ4、波長板ユニット5及び二次元イメージセンサー6,14を備える。波長板ユニットは、構造性複屈折を利用した1/4波長板7と、反射面を有する振動板8との一体構造からなる。二次元イメージセンサーは受光面6a,14aに同心で異なる半径の円形ビームスポット形状が振動板の反射面8aの位置に対応して入射し、その出力信号からビームスポット形状の面積又は半径を測定して振動板の位置又は変位量を検出する。
(もっと読む)
画像処理装置及び外観検査方法
【課題】 安定的に検査領域を特定することが可能な画像処理装置及び外観検査方法を提供する。
【解決手段】 濃淡画像を取得する濃淡画像取得手段110と、距離画像を生成する距離画像生成手段130と、濃淡画像と距離画像の一方の画像において、他方の画像上で検査範囲に相当する検査領域を特定するための特定パターンを検出する特定パターン検出手段150と、濃淡画像と距離画像の他方の画像において、特定パターン検出手段により検出された特定パターンの位置及び傾斜角度の少なくとも一方に基づいて、検査領域を特定する検査領域特定手段170と、特定された検査領域から特徴量を算出する特徴量算出手段180と、算出された特徴量に基づいて、ワークの良否を判定する判定手段190と、を備える。
(もっと読む)
衛星システム及び対象天体特徴取得方法
【課題】 未知の惑星等の対象天体の位置や3次元形状が高精度、かつ、高速に取得することができるようにする。
【解決手段】 衛星側に配置されて、対象天体の撮影画像における特徴情報を所定数抽出して送信する特徴情報取得ユニット4と、地上側に配置されて、特徴情報取得ユニット4からの特徴情報を受信して蓄積し、蓄積した特徴情報に基づき所定の画像処理及び演算処理を行う情報処理ユニット6とを備える。
(もっと読む)
面歪検査方法
【課題】歪検出を簡易かつ高精度に行なうことができる。
【解決手段】検査面1aに対し帯パターンが並行する所定の図形を照明パネル2A,2Bによって所定角度で投影するステップと、投影された上記図形の画像をCCDカメラ3A,3Bにより検査画像として得るステップと、上記図形を上記所定角度と同一角度で平坦面に投影して得られた基準画像と上記検査画像の差分面積を検出するステップとを備え、差分面積の大きさによって前記検査面の歪の程度を検出する。
(もっと読む)
工具摩耗定量化システム及び方法
【課題】生産現場環境で使用して工具摩耗を監視することができるポータブル摩耗定量化システムを提供する。
【解決手段】ポータブル摩耗定量化システムは、手持ち式のイメージ収集装置12と固定治具14とを含む。固定治具14は、イメージ収集装置12に結合された第1の端部26を含む。光源22が、放射軸線に沿って光線36を放射する。ビームスプリッタ24が、イメージ収集装置12の視界軸34に対して斜めに配置されて、光源22からの光線を被検体の一部分に向けて導く。固定治具14の第2の端部32が、ビームスプリッタ24の第1の端部26とは反対側に設置される。第2の端部32は、固定治具14を被検体に対して位置決めするように構成されたプラットフォーム44を含む。チャネル30が、イメージ収集装置12の視界軸34に沿って第1の端部26から第2の端部32まで延在する。
(もっと読む)
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部103と、精度を高めるために点群データの再取得の要求を行う点群データ再取得要求処理部106を備えている。
(もっと読む)
画像位置決め測定方法
【課題】 本発明は、画像処理による位置決め測定方法の安全かつ簡便化と操作容易化を図り、画像位置決め測定装置の小型化・高精度化を図ったものである。
【解決手段】 顕微鏡、オートフォーカスユニット、門型のステージ計測ユニット6、パソコン、防振台、直動基準スケール、直動基準スケール治具、回転用基準スケール、回転用基準スケール治具で構成される画像位置決め測定装置を用いて、計測したい製品を門型のステージ計測ユニットに載置し、基準スケールと基準スケール治具をステージの上に置き、ステージを動かしながら基準スケール治具で基準スケールとステージの平行出しを行ない、基準スケールに記載されている目盛線のメモリーのピッチ間を画像処理により計測して基準寸法を決め、それに基づきステージの「位置決め精度」、「繰り返し位置決め精度」、「バックラッシュ」、「XY直交度」、「平行度」などの測定をし、測定項目ごとに画像処理により連動もしくは手動操作で計測を行なう画像位置決め測定方法。
(もっと読む)
分析パラメータ出力方法、分析パラメータ出力装置および分析パラメータ出力プログラム
【課題】画像データを分析するためのパラメータを出力する。
【解決手段】分析パラメータ出力装置1は、画像データに含まれるオブジェクトの位置を対応付けて記憶したオブジェクト位置データ12aと、オブジェクト位置データ12aを読み出して、オブジェクトの密集度を算出する密集度算出部23と、複数の前記画像データのオブジェクトの密集度の平均を算出するとともに、画像データごとに、画像データの密集度と平均との比率からパラメータを算出するパラメータ算出部24と、を備える。
(もっと読む)
被写体計測方法
【課題】 写真などで大きさを把握するための目安となるよう煙草のケース等を一緒に撮り後に画面上で対比することでおおよその寸法を計測していた。
【解決手段】 正対した被写体が平面と仮定し、その被写体の大きさが被写体面寸法(Y)=結像面寸法(X)×(被写体間寸法(T)÷結像主点間寸法(b)−1)のY=X(T÷b−1)の式で分かることから計算結果を表示するようにすることで長さが分かり、画像内にある焦点の合っている測りたい物体の始点と終点に任意により点を合わせることで画像内の目印の各点間の寸法を対比計算することで被写体寸法を割り出すことができ、自動認識により画像内で線、角度等を認識し座標を設け各距離を割出すことができ又、これらの画像による座標確認を面積計測用のソフトに組込むことで作図作業が不要になる。
(もっと読む)
画像処理装置および画像処理方法
【課題】レンズをデフォーカスさせた場合であっても、スポット光の重心位置を高精度に算出することができる画像処理装置および画像処理方法を得る。
【解決手段】光源からの光を集光させたスポット光が入射した画像におけるスポット光の重心位置を算出する画像処理装置(方法)であって、スポット光が入射した画像の各画素の輝度値に基づいて、画像の1次重心を決定する1次重心決定手段(ステップ)と、1次重心を中心とする所定半径の円を描く円描画手段(ステップ)と、所定半径の円と各画素との重複割合を算出する重複割合算出手段(ステップ)と、重複割合を、0から1までの重みに切り詰める重み設定手段(ステップ)と、各画素の輝度値に重みを乗算して、スポット光の重心位置を算出する重心位置算出手段(ステップ)とを備えたものである。
(もっと読む)
61 - 80 / 431
[ Back to top ]