
Fターム[2F065CC11]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 車両;自動車 (618)
Fターム[2F065CC11]に分類される特許
121 - 140 / 618
カメラ姿勢パラメータ推定装置
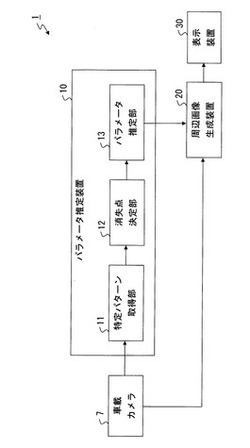
【課題】広角カメラの姿勢パラメータを容易にかつ正確に推定する技術を実現する。
【解決手段】カメラ姿勢パラメータ推定装置は、半球以上の視野を有する広角カメラにより得られる広角画像から、実空間における、相互に平行な少なくとも2つの第1直線及び第2直線と、第1直線及び第2直線と垂直な関係を有する1つの第3直線とから構成される特定パターンを形成し得る各線分をそれぞれ取得するパターン取得手段と、このパターン取得手段により取得された特定パターンを形成し得る各線分を用いて上記広角画像に対する2組の消失点ペアを決定する決定手段と、この決定手段で決定された2組の消失点ペアを用いて地面に対する広角カメラの姿勢パラメータを推定する推定手段と、を備える。
(もっと読む)
変位計測方法及び変位計測装置

【課題】光学素子の傾き精度の影響を受けず、構成が簡単かつ小型化が可能であって、回折格子の面方向の位置ずれに対しても影響が小さく、光学分解能の調整が可能な変位計測を行う。
【解決手段】レーザ光源12からのレーザ光13を、コリメータレンズ14によって平行光15とし、第1の回折格子16を通過させて半透過半反射ミラー22まで進行させ、一部を反射させて第1の回折格子16を通過する第1の戻り光Lrev1とする。平行光15の残りは全反射ミラー24まで進行して反射され、半透過半反射ミラー22と第1の回折格子16を通過する第2の戻り光Lrev2となる。第1の回折格子16による第1,第2の戻り光Lrev1,Lrev2の所定次数の回折光を、第1の光センサ28で光量検出し、半透過半反射ミラー22に対する全反射ミラー24の軸方向の相対的移動量に対応する干渉縞もしくはその信号から変位量を得る。
(もっと読む)
車載カメラ校正システム及びコンピュータプログラム
【課題】特定の路面標示や、予め記憶した路面標示の特徴量を必要とすることなくカメラの校正を行える「車載カメラ校正システム及びコンピュータプログラム」を提供する。
【解決手段】カメラ1で撮影した二つ画像フレームから特徴点を抽出し、同じ地点を表す特徴点のペアにペアリングする。画像フレーム上の座標と、当該画像フレーム上の座標に写り込む地点の前記自動車に固定された世界座標系上の座標との、カメラ姿勢を変数として用いた関係式に従って、前記ペアにペアリングされた二つの特徴点の前記画像フレーム上の座標を用いて示される、当該ペアにペアリングされた二つの特徴点が表す地点の世界座標系上の移動量と、自動車の車速から算出した当該自動車の移動量Dyに対する誤差の、各ペアについての総和が最小となるように、カメラの姿勢を算出する。
(もっと読む)
画像処理装置
【課題】本発明は撮像手段により撮像して得られた撮像対象の動画像におけるフレーム画像を取得し、取得されたフレーム画像間での前記撮像対象の濃度の動きをベクトルで表現するオプティカルフローを算出する画像処理装置を提供する。
【解決手段】本発明の画像処理装置は、前記フレーム画像における前記撮像対象のエッジを抽出し、該エッジを構成する所定点でのオプティカルフローを算出し、算出された所定点でのオプティカルフローから該所定点の奥行きを算出し、前記所定点での奥行きにFOEのY座標からの距離に応じて変化する変数を乗算して補正奥行きを算出し、前記補正奥行きから所定点における三次元情報を復元する。
(もっと読む)
車高検出装置
【課題】専用の車高センサを設けることなく、簡易な構成で車高検出装置を提供する。
【解決手段】車高を検出する車高検出装置10において、車体に固定され、車両周辺の測定対象物までの水平距離Aを測定するソナー40と、車体に固定され、車両周辺の測定対象物を撮像するカメラ30と、撮像された測定対象物の所定部の画像データ,水平距離A,及びソナー40とカメラ30との位置関係データ(B,β)に基づいて、測定対象物の所定部に対するカメラ30の地上高Hを算出し、この地上高Hから車高を算出するECU20と、を備えた。
(もっと読む)
車軸検知装置
【課題】 軸数センサを道路に埋め込むことなく、レーンを通行する車両の車軸を検出することを目的とする。
【解決手段】 強度変調したレーザ光を走査し、路面に向かって斜め下方にレーザ光を放射する微細電子機械素子スキャナと、物体から反射してくる反射光を受光する長尺フォトダイオードとを有した送受光学部を備えて、長尺フォトダイオードの出力光信号の検波信号からレーザ光の反射点までの距離を計測し、得られたレーザ光の反射点までの距離及びレーザ光の照射方向に基づいて車両のタイヤを検知し、軸数をカウントする。
(もっと読む)
車両周辺監視装置
【課題】カメラの時系列画像間での特徴点の追跡を行うことなく、計算量を低減させてカメラ運動を精度良く推定する車両周辺監視装置を提供する。
【解決手段】異なる時点で撮像された第1撮像画像Im1及び第2撮像画像Im2について、第1特徴点P1〜P3を抽出すると共に第2特徴点Q1〜Q3を抽出する特徴点抽出処理と、第2撮像画像Im2の撮像時における仮カメラ運動Mkを設定して、各第1特徴点に対応する第2撮像画像Im2での第2エピポーラ線EL11〜EL13を求め、第2エピポーラ線までの距離が最小となる第2特徴点を抽出して、該最小の距離を各第1特徴点の距離誤差dとし、各第1特徴点の距離誤差の総和が最小となる仮カメラ運動Mkを求める仮カメラ運動最適化処理と、距離誤差dの総和が最小となる仮カメラ運動Mkを、カメラ運動として推定するカメラ運動推定処理とを実行する。
(もっと読む)
移動体位置検出システムおよび方法
【課題】撮像した画像が照合用のデータベースにない場合でも位置検出を円滑に継続できる移動体位置検出システムおよび方法を提供する。
【解決手段】平面12上を移動する移動体16の位置を検出する移動体位置検出システム10であって、平面12上に配置された複数のドットからなるドットパターン14と、移動体16に備えられ、移動体16が位置する平面12上の領域を撮像する撮像手段20と、撮像手段20が時間的に連続して取得した2画像中に共通して含まれるドットパターンの位置関係に基づいて、2画像間の位置および方向関係を求め、移動体16の現在位置および方向を推定する推定手段28と、を備えるようにする。
(もっと読む)
操舵角計測装置
【課題】操舵角計測装置を改善することにより、ステアリングホイールの操舵角を作業効率を向上しつつ精度よく計測し得る操舵角計測装置に関する。
【解決手段】ステアリングホイール側に取り付けられかつステアリングホイール3とともに回転する反射面5を有する反射板4と、車体側に固定されかつ反射板4の反射面5にレーザー光6を照射してその反射光6aを受信することで反射面5との距離Lに基づいた信号pを出力する少なくとも1台のレーザー変位計7とを含む。反射面5は、ステアリングホイール3の操舵角θに基づいてレーザー変位計7との距離Lが変化する。
(もっと読む)
計測車両、道路地物計測システム
【課題】移動体にレーザレーダを搭載して地面や壁面に照射し、移動しながら目標物の位置を計測しようとする場合、複数のレーザレーダを用いることは多いが、レーザレーダを単に平行に並べて設置すると、移動速度によって計測点の密度にムラが発生したり、走行に平行な方向と垂直な方向とで計測点の密度差が大きい、という問題があった。
【解決手段】レーザレーダ同士に角度を持たせて設置することにより、計測点の密度のムラや方向による密度差の大きさを軽減することができる。
(もっと読む)
通行物体管理システム
【課題】通行する物体を正確に管理する。
【解決手段】三次元形状測定装置100aが、通行路の入口を通過する物体の三次元形状と進行方向とを測定する。三次元形状測定装置100bが、通行路の出口を通過する物体の三次元形状と進行方向とを測定する。物体が通行路内に進入した場合、三次元形状測定装置100aが測定した三次元形状を、通路内物体形状記憶部220が記憶する。物体が通行路外へ退出した場合、三次元形状測定装置100bが測定した三次元形状と、通路内物体形状記憶部220が記憶した三次元形状とを、通過物体判定分240が比較して、同一物体であるか否かを判定する。
(もっと読む)
シーラー塗布形状監視装置
【課題】複雑なシステムを採用することなく、簡単なシステム構成により、シーラーの塗布品質の管理を正確に行うことができるシーラー塗布形状監視装置を提供する。
【解決手段】ワークWの表面に塗布されたシーラーの塗布品質を判定するシーラー塗布形状監視装置1であって、ワークW及びワークWの表面に塗布されたシーラーZに対してレーザ光Lを照射し、その照射したレーザ光の反射光L´を受光し、その受光した反射光からワークW及びシーラーZの表面輪郭形状を検知する2次元変位センサ3と、2次元変位センサ3が検知した表面輪郭形状を用いて、ワークWの表面に塗布されたシーラーZの高さ及び幅を算出する制御装置10と、制御装置10が推定したシーラーZの高さ及び幅と、所定の基準値とを比較し、ワークWの表面に塗布されたシーラーZの塗布品質の良否を判定する塗布設備制御盤20とを備える。
(もっと読む)
車両判定システム及び通行物体管理システム
【課題】通行する物体が車両であるか否かを正確に判定する。
【解決手段】三次元形状記憶部211は、車両である物体と車両でない物体とを含む複数の物体の三次元形状を記憶する。三次元形状照合部212は、三次元形状測定装置が測定した物体の三次元形状と、三次元形状記憶部211が記憶した三次元形状とを比較して、最も近い三次元形状を判定する。種別判定部213は、三次元形状照合部212の判定結果に基づいて、三次元形状測定装置が三次元形状を測定した物体が、車両であるか否かを判定する。
(もっと読む)
基準位置算出システム、および基準位置算出方法
【課題】撮像装置によって撮像された熱画像において基準に用いられる位置の画像座標系における座標値を高い精度で算出することができる基準位置算出システムを提供する。
【解決手段】反射部材51が、遠赤外線を反射する。熱源52が、放射した遠赤外線が反射部材51によって反射される位置に設置される。撮像装置70が、位置測定用装置50を撮像した熱画像を画像処理装置60に出力する。座標値算出手段61が、撮像装置70が出力した熱画像において、単位面積当たりの遠赤外線の強度が所定の値以上である領域の中心の画素の画像座標系における座標値を算出する。
(もっと読む)
パンタグラフ監視装置
【課題】列車の屋根上を撮影した画像を解析して、パンタグラフの舟体に設置されているすり板の欠けや抉れの有無を検出することを可能としたパンタグラフ監視装置を提供する。
【解決手段】列車の屋根上を撮影する監視カメラと、監視カメラによって撮影された検査パンタグラフ画像を画像処理することによりパンタグラフの状態を監視する画像処理装置とを備えたパンタグラフ監視装置において、画像処理部が、予め設定される基準画像上のパンタグラフの舟体の画像と前記入力画像上のパンタグラフ舟体の画像とを比較する検査小領域画像比較部5h、及び、比較結果に基づいてパンタグラフ舟体の欠けや抉れの有無を判断する比較判断部5iを有するパンタグラフ状態検査処理手段を備える構成とした。
(もっと読む)
パンタグラフ監視装置
【課題】列車の屋根上を撮影した画像を解析して、パンタグラフの舟体又はこの舟体に設置されているすり板の折れの有無を検出することを可能としたパンタグラフ監視装置を提供する。
【解決手段】列車の屋根上を撮影する監視カメラと、監視カメラによって撮影された検査パンタグラフ画像を画像処理することによりパンタグラフの状態を監視する画像処理部とを備えたパンタグラフ監視装置において、画像処理部が、検査パンタグラフ画像中に撮影されているパンタグラフに対して直線を抽出する処理を行う直線抽出部5gと、抽出した直線の状態に基づいてパンタグラフの舟体もしくはすり板又はその両方の折れの有無を判断する折れ判断部5hとを備えるパンタグラフ舟体形状検査部5Cを有する構成とした。
(もっと読む)
表面検査装置、表面検査方法および表面検査プログラム
【課題】自動車のボディやその部品などの光沢塗装が施されるなどして表面反射の強い計測対象物であっても、簡単な構造により低コストで高精度かつ高速に表面の疵、塗装の剥がれや凹みなどの表面欠陥を検査することが可能な表面検査装置、表面検査プログラムおよび表面検査方法の提供。
【解決手段】曲面状壁1bを有する計測空間1を構成し、計測空間1内の計測対象物Aに対して照明装置2−1,2−2,2−3の光源光を均一に減光して照明し、照明された計測対象物Aの全照明画像の撮影を行うとともに、パターン光投影装置3によりパターン光を計測対象物Aに直接当たらないように曲面状壁1bに投影して反射させ、カメラ装置4によりこの反射パターン光が投影された計測対象物Aの反射パターン画像の撮像を行う。
(もっと読む)
3次元モデル生成装置およびコンピュータプログラム
【課題】地上物の表面の点群の位置の座標情報から柱状の3次元モデルを生成することができる3次元モデル生成装置を提供する。
【解決手段】3次元モデル生成装置1は、所定の3次元空間内に存在する地上物の表面の点群の位置の座標情報を取得する点群座標情報取得部111と、3次元空間内に平行な平面の対で挟まれた層状の空間を複数設定する層状空間設定部112と、層状の空間に含まれる点群を平面の一方である仮投影面に仮投影する仮投影部113と、それぞれの仮投影面に存在する共通の図形を抽出する共通図形抽出部114と、図形に特徴点を設定して各仮投影面の特徴点を結ぶ直線に垂直な実投影面を設定するとともに、点群を実投影面に垂直に投影した実投影点群を生成する実投影部115と、実投影点の分布に基づいて基準図形を生成する基準図形生成部116と、基準図形を底面とする柱状の3次元形モデルを生成する3次元モデル生成部117とを備える。
(もっと読む)
撮影経路計算装置
【課題】未知空間内のランドマークや景観の特徴によらず、ロボットの移動に伴うカメラの撮影経路を正確に算出できる撮影経路計算装置を提供する。
【解決手段】撮影点の全周囲の全方位画像を、画像座標系の横軸が方位であり、画像座標系の縦軸が撮影装置4による撮影方向に対するピッチ角である画像に変換して、当該変換後の画像の一定の方位毎にピッチ角で規定される上下方向の画素値の周波数成分を算出し、ロボット1の移動に伴って撮影装置4に撮影された各全方位画像について周波数成分を基に方位を照合することにより、全方位画像間の相対方位を推定して、推定された全方位画像間の相対方位に基づいて、ロボット1の移動に伴う撮影装置4の撮影経路を算出する。
(もっと読む)
検測車の車体歪み測定方法および測定装置
【課題】
車体歪みによる基準レーザ光の上下変動の範囲を抑えることで車両の床下と車体フレームとの間に車体歪み測定装置を設置することが可能でかつ検測車の床上には多くの機器、測定装置を搭載するスペースを確保することができる検測車の車体歪み測定方法および測定装置を提供することにある。
【解決手段】
この発明は、レーザ投光器と第1の受光器との間にレーザビームを受けてその光軸の角度を調整する角度調節器を設けることで歪みによるレーザビームの光軸の変動、特に、上側への変動を角度調節器で調節できるようにして検測車の床下に設ける第1,第2の受光器の高さを低く抑え、この角度調節器とレーザ投光器と第1および第2の受光器とを検測車の車体フレーム上でかつ検測車の床下に配置することができるようにしたものである。
(もっと読む)
121 - 140 / 618
[ Back to top ]