
Fターム[2F065CC11]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 車両;自動車 (618)
Fターム[2F065CC11]に分類される特許
81 - 100 / 618
表面状態検査装置、表面状態検査方法及びプログラム
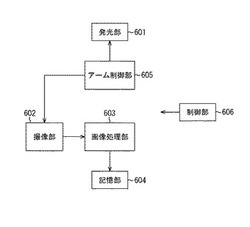
【課題】検査対象物の表面や欠陥の形状に関わらず、欠陥を精度良く検出できるようにする。
【解決手段】検査対象物の表面に生成される照射パターンが少なくとも十字形状及びリング形状となる2種類以上のパターン光を発光部601から検査対象物の表面に照射する。そして、所定の方向に走査しながら前記検査対象物の表面にパターン光を照射するようにする。一方、撮像部602は、照射されたパターン光により生成される照射パターンを含む画像を撮影し、画像処理部603は、前記撮影された画像に含まれる照射パターンの形状の変化に基づいて前記検査対象物の表面の欠陥を検出する。
(もっと読む)
屋外地物検知システム、屋外地物検知システム用プログラム、および屋外地物検知システム用プログラムの記録媒体

【課題】レーザ測量結果である点群と、指定された1枚のカメラ画像とに基づいて、対象となる地物に含まれる点群を特定し、特定した点群から地物の位置と大きさを検知する。
【解決手段】対象となる地物周辺の画像を格納するカメラ画像データ格納部(31)と、対象となる地物周辺のレーザ測量結果を点群として格納する点群データ格納部(32)と、対象となる地物周辺の画像をモニタ上に表示させる画面描画部(21)と、対象となる地物周辺の画像の中から地物の領域内に含まれる少なくとも1点を指定する点指定部(12)と、少なくとも1点に基づいて画像上の地物の領域を決定し、決定した領域に含まれる点群を点群データ格納部から抽出し、点群間の距離が一定距離以下のもの同士をグルーピングすることで地物に対応する点群を分離し、地物領域の位置と大きさを検知する地物検知処理部(22〜25)とを備える。
(もっと読む)
車載カメラの光軸検査方法及び光軸検査装置
【課題】より小型な空間で実施でき、検査中でも車両周囲で作業を実施できる車載カメラの光軸検査技術を提供することを課題とする。
【解決手段】(b)にて車載カメラ光軸検査は、開状態のフード21と車載カメラ20の間にターゲット120を位置決めし、ターゲット120に設けた赤色発光ダイオード121を用いて実施する。
【効果】カメラ光軸検査中に車両11前方でエンジンルーム235内の検査を実施できるため、車両周囲での作業員の動線が制限されない。加えて、フード21の開状態高さとターゲット120の移動距離を含んだ空間があればよく、車両前方に大型の鏡を設けて検査する場合に比べ、検査空間は小型で済む。よって、より小型な空間で実施でき、検査中でも車両周囲で作業を実施できる車載カメラの光軸検査技術を提供できる。
(もっと読む)
検査装置
【課題】コストを抑制しながら検査精度を向上させる。
【解決手段】スコープ本体21のロッド部材23には照明ユニット25が設けられ、スコープ本体21の先端部28には反射板27が設けられる。また、照明ユニット25と反射板27との間に位置する挿入軸26には受光窓31が形成される。検査時には、受光窓31が隙間Xに対向するまで、吸排気ポート12,13にスコープ本体21の先端部28が挿入される。そして、照明ユニット25からスコープ本体21の先端部28に向けて光が照射され、この光は反射板27を介して吸排気ポート12,13のポート内壁面33に照射される。このように、簡単な構成によって吸排気ポート12,13の内部からポート内壁面33を照らすことができ、コストを抑制しながら検査精度を高めることが可能となる。
(もっと読む)
積載量算出装置
【課題】簡単な操作で、車両の積載物の積載容量を容易に算出する。
【解決手段】車両21の荷台22に積載された積載物の積載容量を算出する積載量算出装置10であって、荷台22の積載面24に対して複数の測定箇所を予め分散させて配置し、積載物上面までの距離を複数のレーザ距離計11−1〜11−33により測定し、荷台22の積載面24までの距離をレーザ距離計11−34、11−35により測定し、荷台22の積載面24からの積載高を求めて、平均積載高を算出し、当該平均積載高に荷台22の積載面24の面積を乗じて積載容量を算出する。
(もっと読む)
破断面判定方法および破断面判定装置
【課題】互いに噛み合う破断面の噛み合わせを判定する。
【解決手段】各破断面の表面形状データ(X座標値,Y座標値,Z座標値)が測定される(ステップS10)。続いて、表面形状データに基づき各破断面上に複数の基準点が設定され(ステップS11)、設定された基準点から3点を選択した後に、この3つの基準点を含む仮基準面が設定される(ステップS12)。続いて、対向する仮基準面の一致状態が判定され(ステップS14)、仮基準面が一致している場合には仮基準面が基準面として設定される(ステップS15)。次いで、基準面を基準として表面形状データが比較データに変換され(ステップS18)、この比較データに基づいて各破断面における欠け等の発生状況が判定される(ステップS19)。そして、欠け等の面積に基づいて破断面の噛み合わせが判定される(ステップS20)。
(もっと読む)
内燃機関用構造体、位置検知機構付き内燃機関、および液体状態検知機構付き内燃機関
【課題】 中空部の状態を基体外部から直接確認することができる内燃機関用構造体を提供する。
【解決手段】 中空部を備え、前記中空部で生じる爆発に応じて前記中空部内を運動する運動体が収容される基体と、前記基体に設けられた、前記基体の外側から前記中空部に入射する光、および前記基体の外側から前記中空部に出射する光を透過する窓部材とを備え、前記窓部材が、サファイア単結晶からなることを特徴とする内燃機関用構造体を提供する。
(もっと読む)
列車停止位置検出方法及び列車停止位置検出装置
【課題】列車のオーバーランなどを含む状況下で、列車の先端又は後端の位置を検出できる列車停止位置検出方法及び列車停止位置検出装置を提供すること。
【解決手段】
駅のプラットホームに停止した列車2の進行方向前方から前方カメラCFを用いて当該列車2の先頭部分2Fを撮像すると共に、進行方向後方から後方カメラCRを用いて当該列車2の後尾部分2Rを撮像する。列車2の先頭部分2Fが撮像された画像を基にプラットホームに対する当該先頭部分2Fの位置を検出し、又は列車2の後尾部分2Rが撮像された画像を基にプラットホームに対する当該後尾部分2Rの位置を検出する。このように検出した列車の先頭部分2Fの位置、又は後尾部分2Rの位置を基に、列車2のプラットホーム上の停止位置を検出する。
(もっと読む)
複層塗膜の非接触非破壊評価方法及びそれを用いた装置
【課題】複層塗膜の内部構造及び内部欠陥を、非接触非破壊且つ簡便に測定、解析することができる複層塗膜の非接触非破壊評価方法及びそれを用いた装置を提供すること。
【解決手段】本評価方法は、光源1からの光を参照光と複層塗膜4への入射光とに分岐する分岐ステップと、前記参照光の光学距離を調整する調整ステップと、前記複層塗膜からの反射光と前記参照光とを干渉せしめる干渉ステップと、前記複層塗膜からの前記反射光を含む干渉光を検出して前記干渉光の強度信号を出力する検出ステップと、前記強度信号を解析する解析ステップと、を含む。
(もっと読む)
表面検査装置
【課題】角度検出感度を向上させるとともに、検出可能な角度範囲を広くする。
【解決手段】波長域が互いに異なる山形輝度分布が互いに重なり合うように帯状面光源を構成し、各波長域の撮影画像の該山形輝度分布に対応する画素値分布に基づいて検査面の角度を2段階で検出する。第1段階では、R、G、Bの画素値間の大小関係と曲線近似情報とに基づいて、光源面上周期内参照光位置xを決定し、第2段階では、明度の値と曲線近似情報とに基づいて、周期内参照光位置xがどの周期iに属するか、すなわち、周期始点位置Xiを求める。次いで参照光位置X=Xi+xを検査ラインでの検出角に変換する。
(もっと読む)
校正装置、距離計測システム、校正方法および校正プログラム
【課題】 ステレオカメラの経時的な位置ずれを補正し校正できる装置や方法を提供する。
【解決手段】 この校正装置は、移動体に搭載され、カメラ位置に関するパラメータを校正する装置であり、2地点において一方のカメラで撮影した2つの基準画像と、他方のカメラで撮影した2つの対応画像と2つの基準画像とを用い、各地点につき基準画像と対応画像の中の共通する複数の特徴点の位置から算出された複数の視差データとの入力を受け付ける画像取得部300と、2つの基準画像の中の共通する複数の特徴点を探索する特徴点探索部310と、探索された各特徴点につき、2つの基準画像の各特徴点における視差データから、視差とその視差に対応する視差変化量とをそれぞれ算出する視差計算部320と、算出された複数の視差および視差変化量から、カメラ位置に関するパラメータの補正値を算出する補正値計算部330とを含む。
(もっと読む)
走行状態判定装置
【課題】車両に搭載されたカメラの撮影画像を処理してピッチ角からその車両の走行状態や路面状態を判定する走行状態判定装置において、ピッチ角を、簡単にかつ、実際との乖離なく正確に推定できるようにして判定性能を向上する。
【解決手段】車両1に搭載されたカメラ2の撮影画像を、射影変換部32によってカメラ視点を変える簡単な座標変換の処理で迅速に側面視画像に射影変換し、ピッチ角推定部4により即面視画像の時間変化から車両1のピッチ角を実際との乖離を防止して正確に推定推定する。
(もっと読む)
ホーム転落検知システム
【課題】駅ホーム上でホーム縁に沿って旅客がホームと連射との間に転落した事故が生じた時に、これを高い精度で迅速かつ確実に自動的に検知することができるホーム転落検知システムを提供する。
【解決手段】ホーム転落検知システムは、列車が入線する駅ホームのホーム縁に沿って当該ホーム縁の上方位置に設置され、所定の時間間隔で設定された計測時刻毎に、それぞれ設定された検知エリアに係る検知画像を出力する複数のMEMSセンサSE1〜SEnと、複数のMEMSセンサの各々が出力する検知画像に基づき旅客像に係るデータを記憶するステイタスメモリ41と、ステイタスメモリに記憶された旅客像に係るデータに基づき旅客像の存在の有無に係るデータを取得し、このデータと判定用データとを比較して一致するか否かを判定し、一致するときに旅客のホーム転落状態が発生したと判定するホーム転落判定部52とを備える。
(もっと読む)
物体識別装置
【課題】差分偏光度を用いて撮像画像中における識別対象物の画像領域を識別することが困難な状況下であっても、その撮像画像中の識別対象物の画像領域を高い精度で識別することを課題とする。
【解決手段】撮像領域内のP偏光画像及びS偏光画像を偏光カメラ10で撮像し、画素ごとに、P偏光画像及びS偏光画像間における輝度合計値(モノクロ輝度)と、当該輝度合計値に対するP偏光画像及びS偏光画像間における輝度差分値の比率を示す差分偏光度を算出する。そして、差分偏光度が所定の差分偏光度閾値以上であれば、差分偏光度画像処理部15が算出した差分偏光度を用いて識別対象物である路端エッジ部を識別し、そうでなければ、モノクロ画像処理部13が算出したモノクロ輝度を用いて路端エッジ部を識別する。
(もっと読む)
形状認識装置
【課題】2次元構造の断面データが表す形状曲線を近似するための処理を簡単に行うことが可能な形状認識装置を提供する。
【解決手段】形状認識装置Cは、3次元データが表わす外面形状の曲率が第1所定値を超える領域を抽出する曲率除外領域抽出手段14と、曲率の変化量が第2所定値を超える領域を抽出する変化量除外領域抽出手段15と、曲率除外領域抽出手段14により抽出された領域と変化量除外領域抽出手段15により抽出された領域とを除外領域として設定する除外領域設定手段16と、3次元データにおける設定領域の形状を詳細に反映した詳細形状データと粗く反映したベース形状データとを取得すると共に、夫々の形状データから除外領域に含まれるデータを除外して夫々の修正形状データを生成し、夫々の修正形状データの曲率に基づいて外面形状の歪値を抽出する形状評価手段20と、を備える。
(もっと読む)
車両寸法検出システム
【課題】車両通過帯を通過する車両の寸法を検出すること。
【解決手段】車両通過帯170の側方に設けられて、当該車両通過帯170を通過する車両190を映す鏡130と、車両通過帯170の上方に設けられて、当該車両通過帯170を通過する車両190と、鏡130に映った当該車両190の鏡像とを撮像する撮像装置150と、撮像装置150と電気的に接続されて、撮像装置150が撮像した画像における、車両190の実像の輪郭線上の特徴的な複数の実像点と、鏡130に映った当該車両190の鏡像の輪郭線上の特徴的な複数の鏡像点とに基づいて、当該車両190の寸法を演算により求める演算装置110とを備える。
(もっと読む)
車両間隔検出システム、車両間隔検出方法及び車両間隔検出プログラム
【課題】料金所内に前後車両が接近して入ってきたとき、前後車両の撮像画像から通信可否を判定する。
【解決手段】前方車両の前部画像を撮影する車両撮影手段11と、撮影された画像などから車両を検出する車両検出手段21と、撮影された前方車両の前部画像に映るフロントガラス底辺の画像位置に基づき前記無線受信器から前記前方車両のフロントガラス底辺までの水平距離の他、フレームレートとガラス底辺画像の変化から速度を求める距離演算手段22と、前方車両の車両サイズ(車両長さ,後部高さ)を取得する車両サイズ取得手段23と、前方車両の速度と水平距離+車両長さとを用いて、前後車両の車間距離を推定し、後続車両でのDSRC通信による料金収受データの受信不可(隠れ)を判定する隠れ発生有無判定手段24とを備えた車両間隔検出システムである。
(もっと読む)
可動式ホーム柵測定装置及び測定方法
【課題】必要とする測定点の抽出及び可動式ホーム柵の測定が可能となり、信頼性が高く、しかも、安全で高能率な測定作業を行うことができる可動式ホーム柵測定技術を提供する。
【解決手段】離れ測定手段によって測定された測定データの変化量が閾値より大きい場合に、台車上の柵本体頂部及び支障物センサボックス頂部を測定することができる位置に設置された上部非接触位置センサにより、軌道と直交する方向の縦断プロファイルを測定し、上部非接触位置センサによって測定された測定データの変化量から支障物センサボックス設置箇所であると判定した場合に、柵本体頂部の離れと支障物センサボックス頂部の高さと離れ、支障物センサボックス下部の離れをそれぞれ求める。
(もっと読む)
表面形状計測方法およびその装置
【課題】外乱光が存在する場合でも正確に被計測部材の表面形状を計測することのできる表面形状計測方法およびその装置を提供する。
【解決手段】スリット光画像の長さ方向に直交する画素列を列番号第1列として、第1列目の第1所定範囲内の画素の輝度値から初期中心位置G0を求め、初期中心位置G0を中心とし、第1所定範囲より狭い第2所定範囲(参照光幅)内の画素の輝度値から第1列目の中心位置G1を求める。第2列以降の第i列〜第n列までは、第(i−1)列目の中心位置G(i−1)を中心として第2所定範囲内の画素の輝度値を加重平均して第i列目の中心位置Giを求めて、中心位置G1〜Gnを求めG1〜Gnを接続して表面形状を求める。
(もっと読む)
車両寸法計測装置
【課題】反射材を備えるターゲットが複数設置された車両をステレオカメラにより撮影した画像のみに基づいて、車両の寸法を精度良く計測できる車両寸法計測装置を提供する。
【解決手段】 車両2の車長に合わせて設置され、既知の高さに設定される車長用ターゲット3と、車両2の車幅に合わせて設置され、車長用ターゲット3と同一の高さに設定される車幅用ターゲット4と、車両2の最も高い位置に設置される車高用ターゲット5と、車両2の車軸方向に沿うように設置され、車長用ターゲット3及び車幅用ターゲット4と異なる既知の高さに設定される車軸用ターゲット6と、夫々のターゲット3〜6が設定された車両2を撮影するステレオカメラ7と、該ステレオカメラ7から得た画像に基づいて、車両2の寸法を計測する演算装置とを備える車両寸法計測装置1。
(もっと読む)
81 - 100 / 618
[ Back to top ]