
Fターム[2F065CC14]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 建築物 (337)
Fターム[2F065CC14]に分類される特許
41 - 60 / 337
3次元情報取得方法、3次元情報取得装置、および3次元情報取得プログラム
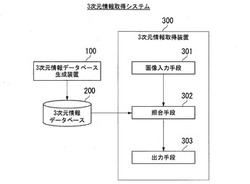
【課題】被写体を2次元で表現する画像に基づき被写体の3次元空間内における奥行きを示す3次元情報の検出精度を高めること。
【解決手段】3次元の対象物を2次元で表わす画像の画像データを入力する画像入力ステップと、前記画像データに基づき前記画像の特徴量を示す特徴量情報を、前記画像を複数個に分割した分割エリア毎に取得する特徴量取得ステップと、3次元の対象物を2次元で表わす画像内における任意のサンプリングポイント毎に、当該サンプリングポイントの画像の特徴量を示すサンプリングポイント特徴量情報と、仮想3次元空間において前記対象物を表現した場合の前記サンプリングポイント同士の水平方向の間隔を示す3次元情報とをそれぞれ対応付ける3次元情報テーブルを参照して、前記特徴量情報が示す前記分割エリアの画像の特徴量と対応する前記3次元情報を取得する3次元情報取得ステップと、を含むことを特徴とする。
(もっと読む)
コンクリート構造物のひずみ計測方法

【課題】施工ブロック毎に分割して構築されるコンクリート構造物のひずみを効率の良い作業で精度良く計測する。
【解決手段】施工ブロック毎に順次コンクリートを打設して構造物を構築するものとし、一つの施工ブロックのコンクリートを打設した後、隣接する施工ブロックのコンクリートを打設するための型枠内には、先の施工ブロックに埋設された可撓管に接合して連続する可撓管を配置する。複数の施工ブロックのコンクリートの打設が終了すると可撓管16内に光ファイバケーブル18を挿入するとともにグラウト17を注入し、光ファイバケーブルとコンクリート1aとを一体化する。その後、光ファイバケーブルの一端にひずみ測定器を接続し、光パルスを入射して後方散乱光を検知する。後方散乱光の周波数の変化及び後方散乱光を検知した時間から橋桁の各位置に生じたひずみの大きさを計測する。
(もっと読む)
免震装置の検査方法
【課題】免震装置が設置されている場所のスペースが制約になることを抑え、高精度に検査する。
【解決手段】上部構造体に固定された上端板11、および下部構造体に固定された下端板12にはそれぞれ、水平方向に延びる水平部20、および鉛直方向に延びる鉛直部21を備える印体22、23が、これらの水平部および鉛直部が径方向の外側を向くように配設され、上端板および下端板に各別に配設されて上下で対をなす印体を一体に撮像し、得られた撮像データ30上における印体の水平部および鉛直部を特定することで二次元直交座標系を決定し、該撮像データ上で印体が占める画素数に対する当該印体の実寸法の比率と、該撮像データ上における上下一対の印体同士の間の水平方向および鉛直方向それぞれの画素数と、に基づいて、これら上下一対の印体同士の水平方向および鉛直方向それぞれの距離を計測することにより、弾性体13の変形を検査する。
(もっと読む)
構造物モデル作成装置及びその方法
【課題】構造物の撮影画像に基づいて、構造物の面及び交線の位置を自動計測し、構造物モデルを自動的に作成し、表示可能な構造物モデル作成装置を提供する。
【解決手段】本発明による構造物モデル作成装置1は、コード付き標識CTを配置した測定対象面2の撮影画像3を取得する画像データ取得部4と、同一測定対象面に配置されたコード付き標識CTが同一グループに属するようにコード付き標識CTをグループ分けする標識グループ化部71と、測定対象面2の面方程式を算出する面方程式算出部72と、測定対象面間の交線を求める交線算出部74と、1つのグループに対応する測定対象面2に隣接する隣接測定対象面を特定する隣接面特定部73と、各グループに対応する測定対象面と隣接測定対象面との交線とを表示する表示部12とを備える。
(もっと読む)
3次元環境復元装置、3次元環境復元方法、及びロボット
【課題】動的な環境下においても、効率的にマップ更新処理を可能とする。
【解決手段】3次元環境復元装置10は、環境を3次元で計測する環境認識センサ5と、計測された計測データから、観測物体の3次元形状を表す3次元点群を生成する3次元点群生成処理部11と、3次元環境を表現するデータ構造であって、当該3次元環境が格子領域に区切られて観測物体が存在する格子領域に直方体が配置された3次元環境マップを多段マップとして、生成された3次元点群データを用いて多段マップを時分割で生成し、当該生成した多段マップを記憶手段に規定時間分蓄積する時分割多段マップ生成/蓄積処理部12と、蓄積された規定時間分の多段マップと、新たに生成された多段マップと、を合成することで、新たな環境情報を反映させた全体多段マップを生成する全体多段マップ生成処理部13と、を備える。
(もっと読む)
検知装置、及び、検知方法
【課題】車両の側方に搭載されたカメラが撮影した車外画像のみに基づいてカメラの光軸の位置ズレを簡易に検知できる技術を提供する。
【解決手段】車両と相対的に移動する物体の像の車外画像中の移動軌跡と基準となるラインとを比較してカメラの光軸の位置ズレを検知するため、検知装置はカメラの光軸の位置ズレを車外画像のみで簡易に検知することができる。
(もっと読む)
画像データ処理システム
【課題】長い距離にわたるコンクリート壁面などのコンクリート構造物の診断を、安価にしかも短時間で行うことが可能な画像データ処理システムを提供する。
【解決手段】移動式架台10に搭載された可視画像撮影用カメラ60と赤外線カメラ70と、最初の可視画像データ及び赤外線画像データに撮影された対象物上の基準点に基づいて、前記複数の可視画像データ及び赤外線画像データの位置関係を求め、前記最初の可視画像データ及び赤外線画像データに対して、あおり補正を施した上で、2番目以降の規格化可視画像データ及び規格化赤外線画像データを、前記位置関係に基づいて重畳し2番目以降の重畳データとし、前記最初の重畳データと前記2番目以降の重畳データとを連結することを特徴とする。
(もっと読む)
積層支持体及び積層支持体の変形測定方法
【課題】積層弾性体の変形測定時に変形量の測定が容易な積層支持体と、この積層支持体を用いた変形測定方法を得る。
【解決手段】積層支持体12の積層弾性体16は、金属板18とゴム板20とが積層方向Sに交互に積層されて構成されており、これらの外側端面を周囲から被覆する被覆ゴム22を有する。被覆ゴム22の外周面は、変形測定用に粗面化処理され、測定用マーキング26が施されている。
(もっと読む)
情報取得装置、情報取得機能付き撮影機器、情報取得用集積回路、画像表示システム、情報取得プログラム、及び情報取得方法
【課題】使用者が注目している被写体と関連のある情報を自動的に検索して表示することができる情報表示装置等を提供する。
【解決手段】被写体に関連する情報を表示デバイスに表示させる情報表示装置である。位置検出部は自装置の位置を継続的に検出する。方向検出部は撮影方向を継続的に検出する。位置特定部は位置検出部によって継続的に検出される自装置の位置と方向検出部によって継続的に検出される撮影方向とに基づいて継続的に撮影されている位置を特定し、当該位置に被写体が有るものとみなす。情報取得部は位置特定部により被写体が有るものとみなされた位置に関連付けて記録されている情報を取得する。表示制御部は、情報取得部により取得された情報を表示デバイスに表示させる。
(もっと読む)
線幅算出装置と算出方法並びに算出プログラム
【課題】被写体の表面に現れている線の幅を短時間に精度よく算出可能な線幅算出装置と算出方法並びに算出プログラムを得る。
【解決手段】記憶手段には、画像データに含まれる画素の大きさと被写体の表面上の大きさとの換算値が記憶されていて、画像処理手段は、画像データに含まれる画素ごとの輝度値を算出する輝度値算出手段と、画像データに含まれる画素ごとに算出された輝度値と所定の基準値とを比較し、比較の結果に基づいて画像データに含まれる画素の中から線が撮像されている可能性の高い線画素を特定する線画素特定手段と、画像データに含まれる画素のうち特定された線画素の周辺に位置する周辺画素を特定する周辺画素特定手段と、特定された周辺画素ごとに線境界を特定する線境界特定手段と、特定された線境界と換算値とに基づいて線幅を算出する線幅算出手段とを有してなる。
(もっと読む)
複層塗膜の非接触非破壊評価方法及びそれを用いた装置
【課題】複層塗膜の内部構造及び内部欠陥を、非接触非破壊且つ簡便に測定、解析することができる複層塗膜の非接触非破壊評価方法及びそれを用いた装置を提供すること。
【解決手段】本評価方法は、光源1からの光を参照光と複層塗膜4への入射光とに分岐する分岐ステップと、前記参照光の光学距離を調整する調整ステップと、前記複層塗膜からの反射光と前記参照光とを干渉せしめる干渉ステップと、前記複層塗膜からの前記反射光を含む干渉光を検出して前記干渉光の強度信号を出力する検出ステップと、前記強度信号を解析する解析ステップと、を含む。
(もっと読む)
レーザ測距装置
【課題】簡単な測定作業で任意の多角形の面積を非接触で測定することの可能なレーザ測距装置を提供する。
【解決手段】レーザ測距装置1は、測定対象物10上の任意の多角形の面積を非接触で測定するレーザレーダ方式の測距装置である。2次元スキャナ3は、レーザダイオード2からのレーザ光を偏向させて測定対象物10上の任意の多角形の頂点A,B,…を照射する。フォトダイオード6は、各頂点A,B,…で反射したレーザ光を受光して信号を出力する。演算制御部7は、フォトダイオード6からの出力信号と2次元スキャナ3の動作情報を用いて多角形の面積を算出する。2次元スキャナ3は、測定対象となる多角形をレーザ光の2次元走査により描画表示する。
(もっと読む)
ダム堤体の変位測定装置および変位測定方法
【課題】ダムの堤体に配置したワイヤの水平方向および鉛直方向の変位を検出でき、ダム堤体の変位を精度良く検出できるダム堤体の変位測定装置を提供すること。
【解決手段】ダム堤体の変位測定装置1は、堤体内部に鉛直に配置された測定ワイヤ2と、測定ワイヤ2に固定された金属球20と、金属球20を撮影する2台のカメラ21,22および照明装置23,24と、各カメラ21,22で撮影された画像を処理する画像処理装置30とを備える。カメラ21,22は、レンズの光軸が水平面内で互いに直交する位置に配置する。画像処理装置30は、撮影画像データから金属球20を認識して重心位置を検出し、その重心位置の変位によって、ダム堤体の変位を測定する。金属球20を2台のカメラ21,22で撮影して重心位置を検出しているので、金属球20の三次元方向の変位量を測定でき、ダム堤体の変位を精度良く検出できる。
(もっと読む)
3次元点群の合成方法
【課題】複数方向から計測対象物を計測して取得した3次元点群を自動的に合成することの可能な3次元点群の合成方法を提供する。
【解決手段】計測対象物の近傍または表面に配置された個体識別する複数の計測用ターゲットを、3次元計測手段を用いて計測して3次元の点群として取得する3次元計測ステップ(S2)と、点群から計測用ターゲットに該当するターゲット点群を抽出し、いずれの計測用ターゲットに該当するかを判別する個体点群判別ステップ(S3)と、3次元計測手段の位置を変えて複数の方向から3次元計測ステップと個体点群判別ステップとを繰り返した後、個体点群判別ステップにより一方向において判別した各ターゲット点群及び各他方向において判別したターゲット点群の中で同一性状を示すターゲット点群同士を合成する点群合成ステップ(S4)とを備える。
(もっと読む)
光ファイバ構造物変位計測装置及びその計測方法
【課題】光ファイバの設置毎に、事前に試験を行う必要がなく、不均一なひずみを有する変位であっても、正確に変位を計測することができる光ファイバ構造物変位計測装置及びその計測方法を提供する。
【解決手段】構造物20は、非直線形状であり、かつ変位が発生した場合に不均一なひずみが発生する構造物である。構造物20に固定された光ファイバ1に発生するブリルアン散乱光を検出して、ブリルアン散乱光から観測パワースペクトルデータを計測する。一方、構造物の変位の大きさに対応して発生するブリルアン散乱光のモデルパワースペクトル形状を理論的に算出し、このモデルパワースペクトル形状を観測パワースペクトルデータにあてはめる。あてはめられた最も適合する曲線形状のモデルパワースペクトル形状に基づき、構造物の変位を算出する。
(もっと読む)
画像計測方法及び画像計測装置
【課題】簡単な作業で、大型構造物の計測ができる画像計測方法及び画像計測装置を提供する。
【解決手段】計測対象物である圧力容器100をカメラ2で撮像して撮像画像を取得し、その撮像画像をカメラパラメータに基づいて補正し、補正した計測用画像から計測対象であるボルト孔101と同一平面上に存在する基準円150を抽出し、その基準円150からカメラ2の撮像位置を推定し、上記計測用画像から2つのボルト孔101を検出して、この検出した情報と撮像位置の情報に基づいて、2つのボルト孔101間の距離を算出する。
(もっと読む)
点検システム
【課題】 安価で正確に点検することができるシステムを提供する。
【解決手段】
点検システムは、遠隔操作されるロボット1(移動体)と、ロボット1に設置されたビデオカメラ15と、ロボットから離れて配されるディスプレイ22とを備えている。ロボット1には、第1、第2のレーザービームLBL,LBRを同一平面Pに沿って平行に発射する第1、第2のレーザーポインタ18L、18R(レーザー発射器)が設けられている。第1、第2の指標画像ZL,ZRがディスプレイ22に表示される。ユーザーは、第1、第2のレーザービーム像TL、TRが、第1、第2の指標画像ZL,ZRに入るようにロボット1を遠隔操作し、これにより、ビデオカメラ15の光軸15aと第1、第2レーザービームLBL,LBRを平坦な対象面と直交させる。
(もっと読む)
三次元計測治具及びこれを用いた三次元計測方法
【課題】計測点が平面にある場合や縁にある場合の計測精度の向上を実現したうえで、計測点が凹面にある場合であったとしても、この計測点の三次元座標を正確に計測することが可能である三次元計測治具及びこれを用いた三次元計測方法を提供する。
【解決手段】レーザ測定機LによってワークW上における計測点Pの三次元座標を得るのに用いられる球状のリフレクタRを保持する三次元計測治具1であって、リフレクタRをスライド可能に保持する計測溝4と、ワークW上における計測点Pに接する指示点31を備え、計測溝4は、計測点Pがある部位に対して接近離間する方向に形成され、少なくとも計測溝4の計測点Pから離れた遠端部41で保持するリフレクタRの中心Rpと、計測溝4の計測点P寄りの近端部42で保持するリフレクタRの中心Rpとを結ぶ線分dの延長線上に、指示点31が配置されている。
(もっと読む)
可動式ホーム柵測定装置及び測定方法
【課題】必要とする測定点の抽出及び可動式ホーム柵の測定が可能となり、信頼性が高く、しかも、安全で高能率な測定作業を行うことができる可動式ホーム柵測定技術を提供する。
【解決手段】離れ測定手段によって測定された測定データの変化量が閾値より大きい場合に、台車上の柵本体頂部及び支障物センサボックス頂部を測定することができる位置に設置された上部非接触位置センサにより、軌道と直交する方向の縦断プロファイルを測定し、上部非接触位置センサによって測定された測定データの変化量から支障物センサボックス設置箇所であると判定した場合に、柵本体頂部の離れと支障物センサボックス頂部の高さと離れ、支障物センサボックス下部の離れをそれぞれ求める。
(もっと読む)
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部103と、精度を高めるために点群データの再取得の要求を行う点群データ再取得要求処理部106を備えている。
(もっと読む)
41 - 60 / 337
[ Back to top ]