
Fターム[2F065CC14]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 建築物 (337)
Fターム[2F065CC14]に分類される特許
81 - 100 / 337
光ファイバセンサを備えた構造物のたわみ量の算定方法および装置
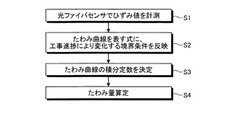
【課題】工事進捗に応じた構造物のたわみ量を算定することができる光ファイバセンサを備えた構造物のたわみ量の算定方法および装置を提供する。
【解決手段】構造物の上側のひずみと下側のひずみとを光ファイバセンサで計測し、光ファイバセンサで計測した上側のひずみと下側ひずみとの差を構造物の上下方向の高さで除算してたわみ量を規定するたわみ曲率を求め、たわみ曲率を構造物の水平方向に関して2回積分して任意の積分定数を含む数式からなる基本たわみ量を求め、基本たわみ量に対して構造物の所定の工事進捗における境界条件を適用して積分定数の値を決定し、決定した積分定数の値が代入された基本たわみ量に基づいて構造物の所定の工事進捗におけるたわみ量を算定するようにする。
(もっと読む)
コンクリート画像抽出方法

【課題】背景や障害物を含むコンクリート構造物の画像から、誤差となるコンクリート面以外の背景や障害物を除去すること。
【解決手段】コンクリート構造物の色と同じ色であって、コンクリート構造物のテクスチャと同じテクスチャの画素をコンクリート候補領域として構造物抽出部131で抽出し、Cannyエッジ抽出法を用いてコンクリート候補領域から当該コンクリート候補領域内に前景として存在する障害物のエッジを抽出し、コンクリート候補領域内の各画素の輝度値を用いて中央画素に対する16個の近傍画素のテクスチャ量Skをそれぞれ計算し、最大のテクスチャ量を有する近傍画素が位置k=9にあって、16個のテクスチャ量の分散値が0.0001以上である場合に、当該中央画素をコンクリート領域として抽出し、モルフォロジーのDilation領域拡大法を用いてコンクリート領域を障害物のエッジに到達するまで拡大する。
(もっと読む)
光学ひずみゲージ、光学的ひずみ測定装置及び光学的ひずみ測定方法
【課題】使用環境が制限されず、測定原理が簡単で、且つ、より高い感度及び精度でひずみを測定できる、光学ひずみゲージ、光学的ひずみ測定装置及び光学的ひずみ測定方法を提供すること。
【解決手段】測定対象物1に取り付けられ、光を反射可能であり且つ測定対象物1のひずみ変形に伴って角度が変化する複数の反射面5を備えるように、光学ひずみゲージ10を構成した。また、光学的ひずみ測定装置100に当該光学ひずみゲージ10を備えた。
(もっと読む)
画像処理装置、画像処理方法、及びプログラム
【課題】2次元データの3次元復元を好適に行う画像処理装置、画像処理方法、および、プログラムを提供する。
【解決手段】デジタルカメラ1は、通常の可視光画像を撮影するための可視光カメラ部21に加え、遠赤外線画像を撮影するための遠赤外線カメラ部24を備える。可視光画像を小領域に分解し、各領域の特徴量を推定する。また、遠赤外線画像に基づき、人物や動物がいる領域を特定する。これらの情報に基づき、各領域の3次元情報を求め、3次元情報を持つ画像データを生成する。
(もっと読む)
内視鏡装置
【課題】観察対象物と内視鏡遠位端部との距離を表示することが可能な内視鏡装置を得る。
【解決手段】初期設定装置は、内視鏡スコープ20の遠位端部21を固定する固定部51と、ターゲット52と、固定部51及びターゲット52が取り付けられる基部53とを主に備える。遠位端部21からターゲット52までの距離がxiであるとき、レーザ輝点Liがターゲット52上に現れ、遠位端部21からターゲット52までの距離がxiiであるとき、レーザ輝点Liiがターゲット52上に現れ、遠位端部21からターゲット52までの距離がxiiiであるとき、レーザ輝点Liiiがターゲット52上に現れる。画像におけるターゲット52の中心点Pから輝点の中心までの距離を用いて、遠位端部21の先端からターゲット52までの距離を測定する。
(もっと読む)
変形および/または温度の測定を実行する少なくとも1つの光ファイバを含む可撓性ストリップ
本発明は、土木構造物のための可撓性ストリップ(1)に関し、この可撓性ストリップは、縦軸に沿って縦方向に延びることができ、構造物が変形および/または温度に関して位置を特定し測定値を得ることを可能にする少なくとも1つの光ファイバ(20)を備え、前記光ファイバ(20)が、実質的に縦軸に沿って配置されるとともに、実質的に縦軸に沿って少なくとも部分的に強化された連続強化繊維(30)の熱可塑性ポリマーマトリックスによって取り囲まれ、実質的に縦軸に沿って延びる連続強化繊維の質量WCFが、光ファイバの質量WOFの10倍以上である。本発明はまた、計測デバイスおよび関連する方法に関する。  (もっと読む)
(もっと読む)
画像処理装置、その画像処理方法及びプログラム
【課題】
画像上に類似した線分が存在する場合や画像上に線分が密集している場合であっても、画像間の線分を正確に対応付けられるようにした技術を提供する。
【解決手段】
画像処理装置は、対象物体を異なる位置及び方向から撮影した画像を入力する入力手段と、前記入力手段により入力された複数の画像各々から前記対象物体を示す線分を検出する検出手段と、前記検出手段により検出された線分各々を識別するのに用いる特徴ベクトルを求める特徴導出手段と、前記特徴導出手段により求められた特徴ベクトルに基づいて前記複数の画像間における線分各々の対応付けを決定する決定手段とを具備し、前記特徴導出手段は、前記検出手段により検出された線分を通過し且つ該線分に平行でない方向に沿って参照ラインを設定し、当該参照ライン上において輝度が変化した画素の輝度情報をその順序に従って並べた情報を要素として含む特徴ベクトルを求める。
(もっと読む)
内部変状検出支援装置及び内部変状検出支援プログラム
【課題】表面の凹凸に基づく温度分布を識別して、内部変状箇所を検出することを支援できる内部変状検出支援装置及び内部変状検出支援プログラムを提供する。
【解決手段】計測結果取得部36が、レーザスキャナ及び赤外線熱計測装置の計測結果を取得すると、変換部38は、計測結果取得部36が取得した赤外線熱計測装置の計測結果を画像データに変換し、熱画像を生成する。また、対応付け部40は、変換部38が生成した熱画像を、座標計測装置が計測した赤外線熱計測装置及びレーザスキャナの計測位置の座標値に基づいて、レーザスキャナの計測結果の凹凸データを対応付ける。表示制御部46は、上記熱画像と、これに対応する凹凸データとを表示装置に表示させ、利用者による対象物の内部変状検出業務を支援する。
(もっと読む)
変位計測装置、変位計測方法、及び変位計測プログラム
【課題】地滑りのように広範囲で変位特徴点が多数となり得る変位計測において、作業効率及び精度の向上を図る。
【解決手段】観測対象領域の地形データをウェーブレット変換して起伏特徴画像を生成する(S42)。地滑り前後の地形データそれぞれから生成される起伏特徴画像についてパターンマッチングを行い、観測対象領域内に設定された変位追跡点の起伏特徴画像上での対応点を追跡する(S44)。起伏特徴画像上での対応点の位置、及び地形データの高さ情報に基づいて、変位追跡点の三次元座標を求める(S48)。各時刻での変位追跡点の三次元座標に基づいて変位追跡点の三次元変位ベクトルを求める(S50)。
(もっと読む)
物体の水平度を求める方法
【課題】物体の水平度を測定する専用の計器を用いることなく、前記物体の水平度を求める際に前記物体に取り付けるターゲットの数を少なくすることにより、前記物体への前記ターゲットの取付けに要する手間や費用を低減すること。
【解決手段】物体の水平度を求める方法は、ターゲットを有する台を前記物体に回転可能に取り付けること、前記台を回転させつつ、前記ターゲットが第1の位置にあるときにおける前記ターゲットの第1の三次元座標と、前記ターゲットが第2の位置にあるときにおける前記ターゲットの第2の三次元座標と、前記ターゲットが第3の位置にあるときにおける前記ターゲットの第3の三次元座標とを測定すること、前記第1の三次元座標、前記第2の三次元座標及び前記第3の三次元座標から、水平面に対する、前記第1の位置と前記第2の位置と前記第3の位置とを含む平面の傾きを算出することを含む。
(もっと読む)
構造物の歪・応力計測方法、歪・応力センサ、及びその製造方法
【課題】静的及び動的な引張・圧縮方向の歪ないし応力をより高精度に計測でき、且つその方向性を判定できる非接触式の歪・応力測定方法などを提供する。
【解決手段】歪・応力の大きさに応じて励起光を照射したときの発光波長が変動し、且つ歪・応力の方向性に応じて発光波長の変動方向が異なる、MAl2O4(M=Sr、Ca又はBa)に発光中心イオンとしてEu等の希土類元素を添加した酸化物系セラミックス焼結体からなる歪・応力センサ10を、構造物1に設置する。歪・応力センサ10に励起光11を照射して蛍光発光12させ、これの発光波長を波長計測手段によって計測し、構造物1に歪が生じていない状態における基準発光波長に対する発光波長変化とその方向を計測することで、構造物1に生じた歪ないし応力の計測とその方向性の判定を行う。
(もっと読む)
計測方法および計測プログラムならびに計測装置
【課題】大掛かりな設備や人員を必要とすることなく、単一の画像データにて簡易かつ高精度に、土木構造物や建築構造物等の被測定物の測定や継続的な監視を行う。
【解決手段】土木構造物や建築構造物等の構造物70に、固定ターゲットマーク42の位置関係が既知の第1ターゲット40と、別の第2ターゲット50を、構造物70に存在する亀裂71等の境界を挟んで独立に配置し、これらの画像をデジタルカメラ90にて任意の位置および方向から撮影して得られた画像データ30を情報処理装置10に入力して計測プログラム20にて処理することで、単一の画像データ30から、構造物70等に対して非接触にて、第1ターゲット40と第2ターゲット50の距離ΔLを計測する。
(もっと読む)
3次元デジタイザ
【課題】連続性のある実画像に3次元情報を持たせ、仮想空間の任意の視点から実画像に含まれる物体を見ることが可能な画像データを生成する3次元デジタイザを提供する。
【解決手段】撮像手段2はカラー画像を撮像し、距離画像生成手段1は撮像手段2と重複する視野を持ち距離画像を生成する。撮像位置計測手段4は、撮像手段2および距離画像生成手段1による撮像位置と撮像方向とを計測する。座標変換手段3は、距離画像に規定した装置座標を位置計測手段4により計測した撮像位置および撮像方向を用いて実空間に規定されている3次元の実空間座標に変換する。座標変換手段3で得られた物体の実空間座標を用いることにより、仮想空間形成手段5では、物体のモデリングを行い仮想空間を形成する。さらに、外観形成手段6は、仮想空間に配置した物体に撮像手段で撮像した物体の外観をテクスチャとしてマッピングを行う。
(もっと読む)
回転位置検出装置
【課題】カメラの前方視界の妨げず、鋼管内面の撮影上で逆光状態とならずに、鋼管内面の周方向の位置を特定することを可能にすることにある。
【解決手段】鋼管検査測定装置102に固定されるベース部材21と、偏心位置を揺動中心22cとしてベース部材21に取り付けられ時計方向の側面位置の第1可動接点22a及び反時計方向の側面位置の第2可動接点22bを有する可動端子22と、重心が揺動中心22cより下方に位置し静止した可動端子22の第1可動接点22aに対向し可動端子22が時計方向に揺動した際に第1可動接点22aと接触する第1固定接点23aを有する第1固定端子23と、重心が揺動中心22cより下方に位置し静止した可動端子22の第2可動接点22bに対向し可動端子22が反時計方向に揺動した際に第2可動接点22bと接触する第2固定接点24aを有する第2固定端子24とを備えている。
(もっと読む)
ひずみ・変形の計測監視装置
【目的】光損失の小さい1550nm付近の帯域光を使用するBOTDRといわゆるCバンド帯域の波長分割多重化方式FBGとを組み合わせて測定することによって、最大10kmに及ぶ範囲のひずみ測定を高精度に行うことができる、ひずみ・変形の計測監視装置を提供する。
【構成】FBG光測定器とBOTDR光測定器と、両測定器の使用を切り替える光スイッチと、光スイッチを介して両測定器に接続された光ファイバと複数個のFBGセンサとにより構成された測定部とを備え、複数個のFBGセンサに略1550nm付近の波長光を検出するFBGセンサを使用してなり、光スイッチによりFBG光測定器とBOTDR光測定器とを切り替え、両測定器による測定が時間をずらして同一の前記測定部で行える、ことを特徴とする。
(もっと読む)
三次元位置合わせ方法
【課題】圧縮機等の大型の装置を取り外して復帰させるときに、三次元測定により高精度に復元させる。
【解決手段】既設設備の一部を取り出し取り出した設備の一部を戻して復帰させるときに用いる三次元位置合わせ方法である。設備の近傍であって不動物に間隔をおいて少なくとも3個のフィールドターゲットを設定する。取り出す設備部分であって復帰時に戻される部分には、少なくとも3個の設備ターゲットを設定する。これらフィールドターゲットと設備ターゲットについて、設備の一部を取り出す前と復帰時にレーザ式測定器を用いて位置座標を測定し、その測定結果から有効なフィールドターゲットを設定する。有効なフィールドターゲットの座標を用いて、復帰時に設備ターゲットを取り出す前の状態に設定する。
(もっと読む)
コンクリート構造物の歪み検出装置
【目的】いわゆる金属を使用しない腐食に強い起歪体を形成し、もって外装材により起歪体を保護する必要がなく、コンクリートに起歪体を直接接触させられ、かつコンクリートのひずみを起歪体周囲の付着力により直接起歪体に伝達できるため、計測値につきばらつきのない高品質で破損や故障の少ない長期間の計測が可能なひずみ検出装置を提供し、さらに、長大構造物に対しても劣化の可能性が少なく、かつ精度よくコンクリート構造物の内部温度が計測できる内部温度検出装置をすることを目的とする
【構成】FBGセンサが設けられた光ファイバを、光ファイバと略同等の線膨張係数、弾性係数を有するガラス繊維部材で被覆して起歪体を形成し、起歪体をあらかじめ内部設置した状態で、コンクリートを打設して構造物を構築し、コンクリート構造物の構築後生ずる歪みを検出可能とした、ことを特徴とする。
(もっと読む)
変位計測装置、及び変位計測方法
【課題】局所的な変形が生じた場合にもより正確に変位を計測することができる変位計測装置及び変位計測方法を提供する。
【解決手段】変位計測装置1は、光線Bを出射する照射部5と、前記光線Bの一部を透過し第1光線B1を出射すると共に前記光線Bの他の一部を分離して延長光EBを出射する光路長変更部6と、前記第1光線B1及び前記延長光EBを受光して天井3の変位を検出する変位検出部7とを備える。変位検出部7は、第1光線B1を受光して第1受光位置を検出する第1受光部10と、前記延長光EBを受光して第2受光位置を検出する第2受光部11と、前記第1受光位置及び前記第2受光位置から変位を算出する算出部12とを有する。
(もっと読む)
変位測定装置
【課題】変位測定値の誤差が小さいうえに、安価に実施することができる変位測定装置を提供する。
【解決手段】対象物としての杭頭1Aに取り付けられるPSD2Aと、PSD2Aの受光面21Aに向けて照射光としてのレーザー光L1を照射する光源としてのレーザーポインタ3と、PSD2Aの受光面21Aにおけるレーザー光L1の受光位置から杭頭1Aの変位測定値を算出する演算処理手段としてのパーソナルコンピュータ4とを備えた構成とされている。
(もっと読む)
被写体面積算出装置、被写体面積算出システム、被写体面積算出方法
【課題】簡単な標識を含む画像のみで、被写体における対象領域の面積を算出する被写体面積算出装置を提供する。
【解決手段】第1撮像装置により撮像された被写体と標識とを含む第1画像と、第2撮像装置により第1撮像装置と異なる角度から撮像された被写体と標識とを含む第2画像と、を読み出す読み出し手段12と、第1撮像装置の第1位置の3次元座標の値と、第2撮像装置の第2位置の3次元座標の値とを推定する撮像装置座標推定手段13と、第1位置および第2位置に基づいて、被写体に含まれる複数の特定点のそれぞれの3次元座標の値を推定する特定点座標推定手段14と、複数の特定点のそれぞれの3次元座標の値に基づいて、被写体の面積を算出する面積算出手段15と、を備え、標識は、3以上のポインタを備える2次元形状を有する
(もっと読む)
81 - 100 / 337
[ Back to top ]