
Fターム[2F065CC16]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 人体;動物 (953)
Fターム[2F065CC16]に分類される特許
101 - 120 / 953
対象物検出装置及び方法
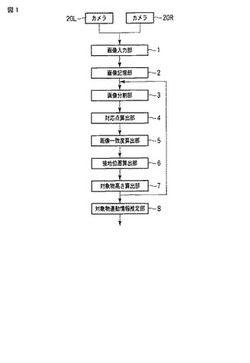
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
通過者識別装置

【課題】規定の場所を通過する通過者の外観形状を計測することによって通過者の体型を類別し、結果的に住宅内などの少人数の範囲内で個人の特定を可能にする。
【解決手段】距離センサ20は、特定面を通過する通過者の外観形状を計測した距離データを出力する。距離データ処理部31は、距離センサ20から出力された距離データを用いて通過者の胴囲を推定する機能を備える。登録情報記憶部34は、識別対象の人物の外観形状を当該人物に対応付けて記憶している。識別部35は、距離データ処理部31で推定した胴囲、身長、肩幅を、登録情報記憶部34に照合し登録情報記憶部34に登録された人物のうち類似度が判定条件を満たす通過者を選択する。
(もっと読む)
光学式位置検出装置、および表示装置
【課題】少ない部品で複数の対象物体の位置を高い分解能で検出することのでき、さらには、少ない部品で対象物体の三次元座標を高い分解能で検出することのできる光学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10では、導光部材40、第1検出用光源121および第2検出用光源122を備えた線状光源ユニット13が複数並列配置されており、点灯した線状光源ユニット13が切り換わった際の光検出部30での受光結果によりY軸方向(第1方向)における対象物体Obの位置を検出する。また、第1検出用光源121と第2検出用光源122とが順次点灯した際の光強度分布を利用してX軸方向における対象物体Obの位置を検出する。さらに、第1検出用光源121および第2検出用光源122が同時点灯した際の光強度分布を利用してZ軸方向における対象物体Obの位置を検出する。
(もっと読む)
位置および動作判定方法および入力装置
【課題】被検出体の位置を検出するとともに、被検出体の動作を的確に、かつ、高精度に判定する。
【解決手段】被検出体から発せられた赤外線を受光した赤外線検出部から出力される赤外線検出信号に基づいて、被検出体の位置および動作を判定する位置および動作判定方法であって、赤外線検出部は視野角制限体を有する少なくとも2個の赤外線センサ部を有し、2個の赤外線センサ部からそれぞれ得られる赤外線の強度の差または比をあらわす被検出体の位置信号と、赤外線の強度の各々の差または比を時間の関数とし、時間で微分することにより得た信号と、に基づいて被検出体の動作を判定する。
(もっと読む)
起伏観察装置
【課題】大がかりな装置構成とすることなく、自宅等で簡単に顔のたるみや体型等をセルフチェックすることが可能な起伏観察装置を提供する。
【解決手段】起伏観察装置である起伏観察機能付きカメラ200は、投影用パターンデータを記憶するパターンデータ記憶部90と、投影用パターンデータを用いて観察対象物にパターン画像を投影する画像投影部20と、観察対象物を撮像する撮像部30と、投影用パターンデータと撮像部30により撮像された撮像データとを重ね合わせることにより、観察対象物の起伏状態を強調した画像を生成する画像処理部50と、を有する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】導光板を用いた方式であっても、検出対象空間に強度が適正に単調変化する光強度分布を形成することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10において、光源用回転体13は、検出用光源12から出射された検出光L2を検出対象空間10Rに出射する。光源用回転体13において、第1導光部13A、13Cは一方側端部から他方側端部に向かって強度が単調増加する光を出射するのに対して、第2導光部13B、13Dは、第1導光部13A、13Cとは反対に、一方側端部から他方側端部に向かって強度が単調減少する光を出射する。従って、光源用回転体13が回転して、所定の角度位置に第1導光部13A、13Cが到来したときの光検出器30での受光結果を用いれば、対象物体Obの位置を検出することができる。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】参照用光源から出射された参照光が検出光出射空間に漏れてしまうことを防止しつつ、光検出器での参照用光源の検出強度を適正なレベルに抑えることができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10では、対象物体により反射した検出光L3の一部を光検出器30により受光した結果、および検出対象空間10Rを介さずに光検出器30に入射した参照光Lrの強度に基づいて対象物体Obの位置を検出する。光検出器30と、参照光Lrを出射する参照用光源12Rとは、受光ユニット35を構成しており、参照用光源12Rから出射された参照光Lrが検出対象空間10Rに漏れることを回避する。受光ユニット35では、参照用光源12Rから出射された参照光Lrを、強度を低下させた状態で光検出器30に入射させるため、光検出器30での参照光Lrの検出強度のレベルを低く抑えることができる。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】湾曲したフレキシブル基板に実装された複数の発光素子から出射された検出光を利用して対象物体の位置を検出する方式を採用するにあたって、発光素子を所定の位置に設けることのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置の光源部20では、帯状のフレキシブル基板40に複数の発光素子30が実装されており、複数の発光素子30は各々、検出光L2を出射する。フレキシブル基板40は、基板支持部材50の凸曲面55に重ねて配置されているため、フレキシブル基板40が長すぎた場合、フレキシブル基板40の端部を切り欠き511b、521bに差し込むことができる。このため、フレキシブル基板40が浮き上がることがない。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】検出対象空間の広さ等に応じて光源部の数が変化しても、同一仕様の制御用ICで対応することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10において、検出光を出射する複数の光源部12、および複数の光源部12を制御する制御用IC70を備えた光源モジュール11が用いられている。従って、光源部12の数を増やす際、制御用IC70の仕様を変えずに、光源モジュール11の数を増やせばよい。また、第1光源モジュール11Aに設けられた制御用IC70は、他の第2光源モジュール11B、第3光源モジュール11C、第4光源モジュール11Dに設けられた制御用IC70に対する上位の制御用ICとしてこれらの制御用IC70を制御する。
(もっと読む)
重量、形状その他性状の計測装置
【課題】画像取得装置とソフトウエアにより画像処理し、2次元画像を3次元情報化する画像処理装置と、情報を表示、保持、加工、伝送する情報処理装置を提供する。
【解決手段】コード化されたパターン光を被検体に照射し、瞬時に必要な画像を取得し、画像処理することにより時間差による誤差、計測不可問題を解決する。IDマーカーやICカード等のIDセンサーを被検体に併設し、画像処理やICカード読み取り装置等よりIDを取得し、計測データと連動した管理を行い、形状計測装置と重力計、温度計、圧力計他計測機を組み合わせ1台のパソコンで同時に計測する。計測データをインターネットでセンターのパソコンに伝送し、高度な処理ソフトで解析して、再配信、フィードバックすることにより解決する。
(もっと読む)
光学式検出装置、電子機器及び光学式検出方法
【課題】対象物の位置情報を演算し、対象物のZ位置情報に応じて、コマンド処理とホバリング処理とを適切に切り替えることが可能な光学式検出装置、電子機器及び光学式検出方法を提供すること。
【解決手段】光学式検出装置は、面状領域に沿う領域に照射光を照射する照射部と、対象物に反射した照射光の反射光を受光する第1及び第2の受光部と、第1及び第2の受光部の少なくとも一方の受光結果に基づいて、対象物の位置情報を演算する演算部と、を備え、第1の受光部と面状領域との距離は、第2の受光部と面状領域との距離よりも小さく、第1及び第2の受光部は、面状領域に沿う方向から入射する反射光を受光する。
(もっと読む)
対象領域抽出装置
【課題】 距離情報データに含まれるノイズを除去等する。
【解決手段】 対象領域抽出手段B10は、センサB02から得られる輝度情報データに基づいて、所定以上の輝度の存在する隣接画素数がしきい値以下の部分を削除するための輝度情報マスクを生成する。輝度情報マスクを距離情報データに重ね合わせ、輝度情報マスクに重複する領域の距離情報データだけを抽出する。
(もっと読む)
表面が変化する対象物を3次元デジタル化する方法
【課題】表面が変化する対象物を3次元デジタル化する方法を提供する。
【解決手段】対象物4の複数の部分的表面を示す複数のカメラ画像を撮影して統合して、対象物4の部分的表面の3次元座標を決定する。複数のカメラ画像は、それぞれの端部において互いに重なり合う。マッチング法により対象物4の部分的表面の3次元座標を照合して統合する。カメラ画像の各々をサブフレーム(1.1〜1.8,2.1〜2.9,3.1〜3.9)に分割する。複数のサブフレームは、それぞれの端部において互いに重なり合い、隣接するカメラ画像に含まれるサブフレームに重複する。サブフレーム(1.1〜3.9)に対して、カメラ画像からそのサブフレームに関連する3次元座標を割り当てる。マッチング法によりサブフレーム(1.1〜3.9)の3次元座標を照合して統合する。この方法を数回繰り返して実行する。
(もっと読む)
診断支援装置
【課題】胆道・膵管等の平坦な表面を有する生体内の内壁部において、病変部の疑いのある、「内壁部の表面(最表面)において乳頭状隆起が発生している領域」、及び、「内壁部の表面(最表面)においてランダムに細胞(上皮細胞)が増殖している領域」が存在する場合に、その領域を自動で検出して診断支援を行う診断支援装置を提供する。
【解決手段】OCT装置1の演算処理装置90は、立体構造データにより胆道・膵管の内壁部の表面の位置が検出され、その表面形状から面粗さが算出される。そして、面粗さが粗い領域が「内壁部の表面(最表面)において乳頭状隆起が発生している領域」、又は、「内壁部の表面(最表面)においてランダムに細胞(上皮細胞)が増殖している領域」として検出される。
(もっと読む)
レーザ測定装置
【課題】検出エリア内におけるレーザ光の実際の照射高さを容易に計測し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置100は、レーザレーダ装置1と検出用基準物体90とを備えている。検出用基準物体90の反射部は、所定の高さ方向における各位置が高さに応じた構造をなし、且つレーザ光L1が入射したときに、当該レーザ光L1が入射する高さに応じた内容の特定反射光を発するように構成されている。一方、レーザレーダ装置1は、回動反射機構40から照射されるレーザ光L1の走査エリア上に検出用基準物体90が配置されたときにこの検出用基準物体90からの特定反射光を検出している。そして、反射光の状態と高さ情報とを対応付ける対応データを参照して特定反射光の状態に対応する高さ情報を求め、検出用基準物体90におけるレーザ光の照射高さを計測している。
(もっと読む)
開眼状態検出装置
【課題】開眼状態の検出精度低下を防止することができる開眼状態検出装置を提供する。
【解決手段】画像情報に基づいて開眼状態を検出する開眼状態検出装置1であって、前記画像情報に基づいて上瞼の位置及び下瞼の位置を検出する瞼候補選定部23及び瞼検出部24と、上瞼の位置及び下瞼の位置に基づいて開眼状態を検出する開眼状態検出部25と、を備え、瞼候補選定部23及び瞼検出部24は、瞳孔を透過し網膜で反射される光によって発生する赤目領域の前記画像情報が検出結果に与える影響を他の領域の前記画像情報よりも小さくすることを特徴として構成する。
(もっと読む)
動作モデル学習装置、3次元姿勢推定装置、動作モデル学習方法、3次元姿勢推定方法およびプログラム
【課題】関節位置を手動で指定することなく、姿勢推定の精度を向上させること。
【解決手段】学習時に、全身の関節に関する情報から一つの潜在変数モデルMを構築することに加えて、全身から一部分の関節を選択点として、選択点に関する情報から潜在変数モデルM1を学習し、この潜在変数モデルMと潜在変数モデルM1とを対応付ける動作モデルを学習により得る。これにより、3次元動作情報処理装置100は、推定時に、この動作モデルを参照して、2次元の画像において画像認識しやすく、追跡しやすい一部の関節の動きに基づき、潜在変数モデルMの潜在空間における全部の関節の位置を得ることができる。
(もっと読む)
脳磁場測定装置の校正方法および校正装置
【課題】モーションキャプチャ装置の座標系を簡便且つ正確に校正する。
【解決手段】下記の工程を含むことを特徴とする校正方法。
1.校正装置をデュワヘルメットの測定対象物挿入穴に配置する工程。2.校正装置を構成する各校正用コイルに通電し、デュワヘルメットの測定対象物挿入穴における各校正コイルの位置を算出する工程。3.カメラ及びモーションキャプチャ制御PCで構成されるモーションキャプチャ装置にて、各校正用コイル18の位置を算出する工程。4.工程2にて算出したデュワヘルメットの測定対象物挿入穴における各校正用コイルの位置座標をモーションキャプチャ装置にて算出された校正用コイルの位置として用いてモーションキャプチャ装置の校正を行う。
(もっと読む)
位置検出システム、そのデータ処理装置、そのデータ処理方法およびコンピュータプログラム
【課題】対象人物へのマーカーの装着などを必要とすることなく、極近距離でなくとも対象人物の頭部などの三次元位置を特定することができる位置検出システムを提供する。
【解決手段】位置検出システム100は、取得された測距画像データDGと温度画像データTGとを関連させて定温物質の三次元位置TPを特定する。このため、対象人物HMへのマーカーの装着などを必要とすることなく、極近距離でなくとも対象人物HMの頭部HUなどの三次元位置TPを特定することができる。
(もっと読む)
人体姿勢推定装置、人体姿勢推定方法、およびコンピュータプログラム
【課題】複雑な動きが含まれる人体の姿勢推定を高精度に行う。
【解決手段】リファレンスモーションデータから、動きのリズムを表して動きの突然的な変化が生じているフレームであるビートフレームを取得する動き解析部110と、リファレンスモーションデータを分割した複数のセグメントそれぞれについて、各潜在空間でGPDMを学習し、それぞれ学習したGPDM同士で遷移可能な潜在空間の座標として、ビートフレームに対応する潜在空間の座標を用いて推定するモデル構築部120と、ビートフレームと遷移可能な潜在空間の座標とに基づいて、ユーザの動きを撮影したユーザビデオデータの映像における人体姿勢を追跡する動き追跡部20とを備えた。
(もっと読む)
101 - 120 / 953
[ Back to top ]