
Fターム[2F065CC16]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 人体;動物 (953)
Fターム[2F065CC16]に分類される特許
161 - 180 / 953
ロボット装置及びロボット装置の制御方法
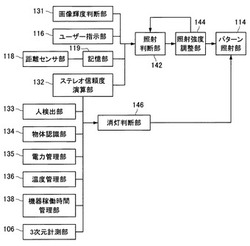
【課題】状況に応じて、3次元計測のためのパターン光の点灯及び非点灯を適切に切り替えることが可能なロボット装置及びロボット装置の制御方法を提供する。
【解決手段】外部の環境にパターン光を照射する照射部と、外部の環境を撮像して画像を取得する撮像部と、外部の環境を認識する外部環境認識部と、画像の取得状態に基づいて、パターン光の照射が必要であると判断したとき照射部を点灯に制御する照射判断部と、外部の環境に基づいて、パターン光の照射が不要である又はパターン光の照射を強制停止すべきであると判断したとき照射部を非点灯に制御する消灯判断部とを備える。
(もっと読む)
物体検出装置

【課題】 検出物までの距離、位置を検出する物体検出装置の提供
【解決手段】 投光素子LE(s,t)が検知光を投光しているとする。このときに、受光素子RE(s,t)、受光素子RE(s,t+1)、受光素子RE(s,t+2)、受光素子RE(s,t+3)を、順次、作動させる。例えば、投光素子LE(s,t)が検知光を投光しているときに、受光素子RE(s,t+3)が反射光を受光したとすると、物体が位置c4付近にあると判断できる。投光素子LE(s,t)から投光方向l1に向かって投光された検知光が、位置c4付近に存在する物体によって反射され、その反射光が受光方向r4に向かって進行し、受光素子RE(s,t+3)によって受光されたと考えられるからである。
(もっと読む)
姿勢検出装置
【課題】
簡易に、かつ、精度良く被検体の姿勢を検出する。
【解決手段】
頭部に装着された個別光発生部121Aj(j=1,2,3)のそれぞれが、波長λjのビーム光を射出している間、処理部は、第1光検出部130A及び第2光検出部140Aの両方の検出部からのビーム光の到達検出結果を得るため、透過設定指令及び不透過設定指令を第1光検出部130Aへ送る。第1及び第2光検出部130A,140Aは、個別光発生部121Ajのそれぞれから射出された光の到達を検出すると、検出結果を処理部へ送る。そして、処理部は、第1及び第2光検出部130A,140Aのそれぞれにおいて、いずれの個別光検出部が波長λjの光を検出したかに基づき、頭部の位置及び姿勢を特定する。
(もっと読む)
移動体位置検出システムおよび方法
【課題】撮像した画像が照合用のデータベースにない場合でも位置検出を円滑に継続できる移動体位置検出システムおよび方法を提供する。
【解決手段】平面12上を移動する移動体16の位置を検出する移動体位置検出システム10であって、平面12上に配置された複数のドットからなるドットパターン14と、移動体16に備えられ、移動体16が位置する平面12上の領域を撮像する撮像手段20と、撮像手段20が時間的に連続して取得した2画像中に共通して含まれるドットパターンの位置関係に基づいて、2画像間の位置および方向関係を求め、移動体16の現在位置および方向を推定する推定手段28と、を備えるようにする。
(もっと読む)
通過者検出装置、通過者検出方法
【課題】規定の領域を通過する通過者の体型の推定を比較的安価な構成で可能にする。
【解決手段】2次元情報を取得する距離センサ2を、人が通過する枠部材1の上部に設ける。距離センサ2は、枠部材1の内側の平面を人が通過する期間における複数の異なる時刻において、2次元情報を取得する。複数の2次元情報は形状推定部32に入力される。形状推定部32は、2次元情報を用いて前記平面を通過する人の頭部の左右幅を計測するとともに頭部の左右幅から頭部の前後幅を推定する。さらに、前記平面を人が通過する間に取得した複数の2次元情報から人の3次元形状の推定に必要な2次元情報を選択し、通過方向における当該2次元情報の間隔を頭部の前後幅から求めることにより、人の3次元形状を推定する。
(もっと読む)
赤外線撮像装置及び赤外線画像の表示方法
【課題】航空機の離着陸時や飛行時に障害となる特定対象を操縦士が容易に認識できるように赤外線画像を表示することができる赤外線撮像装置及び赤外線画像の表示方法の提供。
【解決手段】航空機に搭載される赤外線撮像装置であって、前記航空機に固定され、被写体から放射される赤外線を検知する検知部と、前記検知部から順次出力される信号に基づいて前記被写体の二次元の温度情報を生成する処理部と、前記二次元の温度情報に基づく赤外線画像を表示する表示部とを少なくとも備え、前記処理部は、前記二次元の温度情報に基づいて前記被写体から予め設定した特定対象を抽出し、前記特定対象の全部又は一部の温度情報を予め定めた高い値に設定して、前記特定対象を識別可能にする。
(もっと読む)
移動体軌跡図作成装置及びコンピュータプログラム
【課題】 移動体の撮影画像の処理に対してPTV法を用いなくても、移動体の軌跡画像の三次元表示を可能とする技術を提供する。
【解決手段】 複数のカメラにより撮影された時系列の画像データから、カメラ毎に、移動体の二次元軌跡画像を作成する手段11を有している。これにより、鳥等の移動体の二次元軌跡画像がカメラ毎に複数枚得られることになる。この二次元軌跡画像は線状の静止画像であるため、バイプレーン法等の三次元軌跡画像再構成手段を適用することで、容易に移動体の三次元の軌跡図を作成することができる。ステレオPTV法を用いる必要がなくなるため、屋外フィールドの鳥などの移動体の軌跡図作成用として適している。
(もっと読む)
人物検出装置、人物検出方法及びプログラム
【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と平行な垂直面以外の任意平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定する走査部と、距離に基づいて対象物の任意平面上の断面形状に相当する第1のパターンを算出する算出部と、人物の両脚に相当する任意平面上の断面形状の第2のパターンが予め複数登録されている記憶部と、第1及び第2のパターンを比較して、比較結果に基づいて対象物から人物の脚の特徴を抽出する抽出部と、抽出した特徴に基づいて対象物が人物であるか否かを判断する判断部を備えるように構成する。
(もっと読む)
光断層画像表示システム
【課題】モードロックレーザを用い高速で波長を掃引しても高コヒーレンス性を保つ光源を用いて光断層画像表示システムの分解能、および深達度を向上させること。
【解決手段】波長走査型レーザ光源10に一対の回折格子32,33を対向して配置し、これを分散素子として用いる。この分散素子に半導体光増幅器35を接続し、モードロック信号発生部38よりクロック信号を与えて光信号を増幅する。このクロック信号のクロック周波数を変化させることによってクロック周波数に応じて発振波長を走査することで、高速で波長を可変でき、この光源を用いることで光断層画像表示システムの分解能、および深達度を向上させることができる。
(もっと読む)
物体検出装置および情報取得装置
【課題】レーザ光の光軸方向において、投射光学系の小型化を図り得る情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置は、所定波長帯域のレーザ光を出射するレーザ光源111と、レーザ光源から出射されたレーザ光を平行光に変換するコリメータレンズ112と、目標領域から反射された反射光を受光して信号を出力するCMOSイメージセンサ125と、CMOSイメージセンサ125から出力される信号に基づいて目標領域に存在する物体の3次元情報を取得するCPUとを備える。コリメータレンズ112の出射面112bに、レーザ光を回折によりドットパターンを持つレーザ光に変換する光回折部112cが一体的に形成されている。
(もっと読む)
画像データ処理装置およびコンピュータプログラム
【課題】 移動体の撮影画像の処理に対してPTV法を用いなくても合理的な画像処理をすることによって、的確な三次元表示を可能とする移動体画像データ処理を可能とする技術を提供する。
【解決手段】 複数台のカメラにて所定空間をステレオ撮影し、時系列に連続する左右の画像データに写った移動体を検出して三次元移動軌跡を解析するための装置である。 時系列に連続撮影された画像データを前記複数台のカメラから入力する画像入力手段と、 その画像入力手段に入力された画像データから画素を合成してカメラ毎に二次元軌跡画像を作成する二次元軌跡画像出力手段と、 カメラ毎に作成された二次元軌跡画像から三次元のボクセルデータを作成する三次元ボクセルデータ演算手段とを備えた移動体画像データ処理装置とする。
(もっと読む)
通行物体管理システム
【課題】通行する物体を正確に管理する。
【解決手段】三次元形状測定装置100aが、通行路の入口を通過する物体の三次元形状と進行方向とを測定する。三次元形状測定装置100bが、通行路の出口を通過する物体の三次元形状と進行方向とを測定する。物体が通行路内に進入した場合、三次元形状測定装置100aが測定した三次元形状を、通路内物体形状記憶部220が記憶する。物体が通行路外へ退出した場合、三次元形状測定装置100bが測定した三次元形状と、通路内物体形状記憶部220が記憶した三次元形状とを、通過物体判定分240が比較して、同一物体であるか否かを判定する。
(もっと読む)
光学式位置検出装置および位置検出機能付き表示装置
【課題】簡素な回路構成で第1光源と第2光源とを交互に点灯させることのできる光学式位置検出装置、およびかかる光学式位置検出装置を備えた位置検出機能付き表示装置を提供すること。
【解決手段】光学式位置検出装置10の位置検出用光源装置11では、発光素子12A(第1光源)と発光素子12B(第2光源)とが直列に電気的接続されて光源対121を構成しており、かかる光源対121の両端には定電圧が印加されている。光源駆動回路14は、発光素子12Aと発光素子12Bとの電気的接続個所にパルス信号V1を印加する。このため、パルス信号V1に連動して、発光素子12Aに印加される電圧、および発光素子12Bに印加される電圧が変化するので、1つの信号V1(パルス信号)のみで発光素子12Aと発光素子12Bとを交互に点灯させることができる。
(もっと読む)
波長掃引光源装置及びこれを用いた撮像装置
【課題】 所望の波長範囲で、安定的に発振可能で且つ高速に波長掃引可能な光源装置を提供する。
【解決手段】 発振波長を連続的に変化可能な波長掃引光源装置であって、共振器内に、光を増幅させる光増幅媒体と、該光増幅媒体より放出される光を波長に応じて分散させる第一の手段と、第一の手段により分散した波長の異なる光束同士を平行化させる非集光光学素子で構成された第二の手段と、第二の手段により平行化した光束から所定波長の光束を選択する選択手段と、を備え、前記選択手段により選択された前記所定波長の光束を前記光増幅媒体に帰還させる波長掃引光源装置。
(もっと読む)
車両判定システム及び通行物体管理システム
【課題】通行する物体が車両であるか否かを正確に判定する。
【解決手段】三次元形状記憶部211は、車両である物体と車両でない物体とを含む複数の物体の三次元形状を記憶する。三次元形状照合部212は、三次元形状測定装置が測定した物体の三次元形状と、三次元形状記憶部211が記憶した三次元形状とを比較して、最も近い三次元形状を判定する。種別判定部213は、三次元形状照合部212の判定結果に基づいて、三次元形状測定装置が三次元形状を測定した物体が、車両であるか否かを判定する。
(もっと読む)
基準位置算出システム、および基準位置算出方法
【課題】撮像装置によって撮像された熱画像において基準に用いられる位置の画像座標系における座標値を高い精度で算出することができる基準位置算出システムを提供する。
【解決手段】反射部材51が、遠赤外線を反射する。熱源52が、放射した遠赤外線が反射部材51によって反射される位置に設置される。撮像装置70が、位置測定用装置50を撮像した熱画像を画像処理装置60に出力する。座標値算出手段61が、撮像装置70が出力した熱画像において、単位面積当たりの遠赤外線の強度が所定の値以上である領域の中心の画素の画像座標系における座標値を算出する。
(もっと読む)
光学式位置検出装置
【課題】2つの空間に位置する対象物体の各々の位置を検出することのできる光学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10には、Z軸方向の一方側Z1から他方側Z2に向けて第1検出光L1を出射する第1位置検出用光源121と、Z軸方向の他方側Z2から一方側Z1に向けて第2検出光L2を出射する第2位置検出用光源122とが配置されている。このため、第1位置検出用光源121がZ軸方向の他方側Z2に向けて第1検出光L1を出射した際、第1空間10R1に位置する対象物体Obで反射した第1検出光L1は光検出器30の第1受光素子31で受光される。また、第2位置検出用光源122がZ軸方向の一方側Z1に向けて第2検出光L2を出射した際、第2空間10R2に位置する対象物体Ob2で反射した第2検出光L2は光検出器30の第2受光素子32で受光される。
(もっと読む)
視線計測装置、方法及びプログラム
【課題】ユーザの視線を精度よく計測できる視線計測装置、方法及びプログラムを提供する。
【解決手段】この視線計測装置1は、光源7,7からユーザの眼球に向けて照射された光の反射光をカメラ2,2で撮像する撮像手段と、この撮像データを眼球モデルに適用することにより、前記ユーザの注視対象に対する視線を計測する視線計測手段とを備え、眼球モデルは、眼球の光軸を中心として自由曲線を回転することによって構成される回転面からなる非球面回転体モデルであることを特徴としている。
(もっと読む)
パターン光投影装置
【課題】パターン投影法による人の頭部等の3次元計測に用いられるパターン光を、簡易な装置で明るく、高精細に投影する。
【解決手段】フラッシュを光源とする事で簡易な構造とし、投影する直線状のパターンと平行な方向には広く、垂直な方向には狭いスリット状の絞りを設ける事により、投影された像のパターンと垂直な方向のぼけ幅を小さくし、高精細なパターン光を得る。また、ライトパイプを用いる事により明るいパターン光を得、高精度な3次元計測を行う。
(もっと読む)
位置検出装置および位置検出方法
【課題】撮像面と撮像対象との位置関係を測定または判定する。
【解決手段】データ表示/センサ装置100は、入力表示画面およびバックライトを有する表示/光センサ部と、入力表示画面に照明光を照射する外部照明部とを備えている。表示/光センサ部は、バックライトからの照明光が撮像対象に反射することによって生じる反射像を含む反射光画像と、外部照明部からの照明光によって生じる撮像対象の影の像を含む影画像とを撮像する。また、データ表示/センサ装置100は、撮像対象から入力表示画面に下ろした垂線の足の位置である反射像位置を反射光画像から算出する反射像位置算出部705と、入力表示画面における上記影の位置を影画像から算出する影像位置算出部706と、反射像位置と影の位置とのずれに基づいて撮像対象の入力表示画面からの距離を算出する距離算出部802とを備えている。
(もっと読む)
161 - 180 / 953
[ Back to top ]