
Fターム[2F065CC16]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 人体;動物 (953)
Fターム[2F065CC16]に分類される特許
81 - 100 / 953
ロボット、位置推定方法及びプログラム
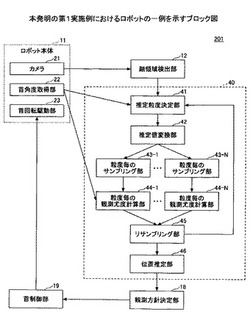
【課題】ロボット、位置推定方法及びプログラムにおいて、比較的簡単、且つ、正確に観測対象であるユーザの位置を推定することを目的とする。
【解決手段】回転可能なカメラの撮像画像から観測対象の人物の領域を検出し、検出された人物の領域に対して、カメラの回転角度を含む観測状況に基づいて複数の推定粒度の情報を有するパーティクルの推定粒度を変更し、各推定粒度を用いて観測対象の位置を推定するように構成する。
(もっと読む)
測定装置、測定方法、およびプログラム

【課題】対象物に接触または近接させた複数の測定用端子の位置を撮影画像に基づいて取得する技術において、一部の測定用端子の位置を取得できなかった場合に、再度の撮影を行うことなくその位置を取得する。
【解決手段】プローブソケット11,12は、被験者の頭部25に複数が装着される。プローブソケットを被験者に装着した状態を複数の方向から撮影し、その撮影画像からプローブソケットの位置を検出する。この際、ある特定の撮影画像からの検出が上手くゆかず、一部のプローブソケット位置が特定できない場合、他の撮影画像の中に写っている当該プローブソケットの撮影画像を利用して再検出を行う。これにより、検出ミスがあっても再度の撮影を行わずに済む。
(もっと読む)
跳躍動作測定装置及び跳躍動作測定方法
【課題】被験者の跳躍動作をより好適に測定することができる跳躍動作測定装置を提供する。
【解決手段】カメラ20によって撮像された画像データに基づいて、測定部13が、カウンタームーブメントジャンプ動作、スクワットジャンプ動作、ホッピングジャンプ動作、及び立ち上がり動作の中から測定動作選択部12によって選択された測定対象の跳躍動作の測定を行い、情報出力部15が、測定結果に基づいた情報を出力する。また、情報提供部14が、選択された跳躍動作となるように、被験者Aに対して、カメラ20によって撮像された画像データに基づいた情報提供を、モニタ30を通じて行う。
(もっと読む)
作業内容測定装置及び作業管理装置
【課題】より高精度の作業内容の測定を実現すると同時に、低コストかつ環境負荷の少ない作業内容測定装置及び作業管理装置を提供する。
【解決手段】作業者及び当該作業者により作業される作業対象の画像に基づいて作業者及び作業対象に係る情報を取得し、かつ、作業対象または当該作業対象とつながった物体に設けられた第1センサーにて自己検出された、当該第1センサーの空間的位置に係る情報を取得し、作業者及び作業対象に係る情報と、第1センサーの空間的位置に係る情報とを統合することで、作業内容の測定結果を示す第1統合情報を生成する作業内容測定装置であって、作業者の一部に設けられた第2センサーにて自己検出された、当該第2センサーの空間的位置に係る情報を取得し、第1統合情報に対し、第2センサーの空間的位置に係る情報をさらに統合することで第2統合情報を生成し、第2統合情報を作業内容の測定結果として出力する。
(もっと読む)
形状計測方法
【課題】計測対象物体の形状を高速かつ高精度に計測する方法を提供する。
【解決手段】4つ以上の光源からなる格子投影用光源11と、1次元格子が描かれた格子面12aを含む、格子投影用光源11に平行に配置された格子プレート12とを備える形状計測装置1を用いて計測対象物体21の形状を計測する方法であって、4つ以上の光源を順次点灯させて計測対象物体21に投影される1次元格子の位相をシフトさせながら計測対象物体21を撮影するステップと、撮影された画像に対して位相解析処理を施して、計測対象物体21の形状を求めるステップとを含み、4つ以上の光源は1次元格子を構成する直線に垂直な方向に等間隔に配置されており、格子投影用光源11を含み格子プレート12に平行な光源面からの距離は、1次元格子の位相シフト量または位相に依存することを特徴とする。
(もっと読む)
光学式位置検出装置および位置検出システム
【課題】広い範囲にわたって対象物体の位置を光学的に検出することのできる光学式位置検出装置、および位置検出システムを提供すること。
【解決手段】光学式位置検出装置10において、検出用光源部12は、検出光L2の出射強度が出射角度範囲の一方側から他方側に向かって減少する第1点灯動作と、検出光L2の出射強度が出射角度範囲の他方側から一方側に向かって減少する第2点灯動作とを行う。従って、第1点灯動作時における受光部13の受光強度と第2点灯動作時における受光部13の受光強度との比較結果に基づいて検出用光源部12に対する対象物体Obの角度位置(角度θ)を検出でき、検出用光源部12が検出光L2を出射した際の受光部13の受光強度に基づいて検出用光源部12から対象物体Obまでの距離rを検出できる。
(もっと読む)
3次元データと2次元データの統合方法及びこれを用いた見守りシステム、監視システム
【課題】距離画像データ等の3次元データと2次元画像データとの対応付け、距離画像データと2次元画像データを相補的に用いることにより柔軟で信頼性の高い認識結果が得られる、3次元データと2次元画像データの統合方法およびそれを用いた頑健な監視・見守りシステムを提供する。
【解決手段】システムは、2次元データを取得する2次元データ取得ステップと、3次元データを取得する3次元データ取得ステップと、上記2次元データと前記3次元データの位置を対応付ける対応付けステップと、上記対応付けステップで対応付けた結果に基づいて上記3次元データを2次元データ上に重畳する重畳ステップとを備える。
(もっと読む)
移動物体検出装置
【課題】レーダを用いることなく、車両に搭載された撮影手段によって撮影された画像から、車両の進行方向を横切る移動物体を精度良く検出すること。
【解決手段】車両の進行方向に対応する、画像の無限遠点とビデオカメラ10の焦点とを結ぶ線分と、車両から見た移動物体の実際の動きベクトルの向きに対応する、各特徴点の消失点とビデオカメラ10の焦点とを結ぶ線分がなす角度を、車両の進行方向に対する各特徴点の相対的進入角度として算出する。そして、算出した各特徴点の相対的進入角度が所定の閾値θth以上であるかにより、移動物体が、車両の進路を横切る進路横断移動物体であるか否かを判定する。
(もっと読む)
物体検知センサ及び噴霧装置
【目的】 本発明の目的は、受光素子間の受光量の設定又は調整を行う必要がない物体検知センサ及び噴霧装置を提供する。
【構成】 物体検知センサは、人Pの接近により受光量が変化し、当該受光量の変化に応じた電圧信号αを出力する受光素子200aと、受光素子200aと異なる方向に向けて配置されており且つ環境光の変化により受光量が変化し、当該受光量の変化に応じた電圧信号βを出力する受光素子200bと、受光素子200bの電圧信号βがしきい値以下であるか否かを判定し、この判定の結果、電圧信号βがしきい値以下であると判定したとき、電圧信号αに基づき人Pの接近を検知する制御部400とを備えている。
(もっと読む)
測距装置、測距方法および撮像装置、撮像方法
【課題】 カメラやビデオカメラ等において、被写体となる対象の距離を測定する測距装置、測距方法および同装置を備える撮像装置、撮像方法に関する。
【解決手段】 所定の間隔を設けて配置された複数の撮像素子と、各撮像素子上に測距の対象の像を結像させるレンズと、各撮像素子に設定される複数の測距エリアから結像に応じて出力される画像信号に基づいて、測距の対象までの距離を各測距エリアごとに算出する距離算出手段と、算出された距離の分布を生成する距離分布生成手段と、生成された距離の分布に基づいて測距の対象が存在する測距エリア内の位置を特定する測距対象位置特定手段と、を有する測距装置による。
(もっと読む)
穿孔機械の補助装置および補助装置の制御方法
【課題】穿孔機械の測定値を表示するための補助装置において安全かつ快適な作業が実現される補助装置を得る。
【解決手段】穿孔機械と連結可能な補助装置において、穿孔機械の作業平面に対する傾き、および/または、穿孔機械の作業平面までの距離を含む測定データを求めるための測定装置と、求められた前記測定データに応じて作業平面上にシンボルを投影するプロジェクタと、を設ける。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体以外の物体で反射した検出光の影響を受けずに対象物体の位置を検出することができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10においては、複数の検出用光源12を順次点灯させると、第1受光部31は、対象物体Obで反射した検出光L3を受光する。その際、第1受光部31には、対象物体Ob以外の物体Sbで反射した検出光L4が入射する場合があるが、光学式位置検出装置10には、検出対象空間10Rに入射しない補償光L5を出射する補償用光源部81と、検出光L2、L3、L4を受光せずに補償光L5を受光する第2受光部32とが設けられており、位置検出部50は、第1受光部31での受光強度と第2受光部32での受光強度との差に基づいて対象物体Obの位置を検出する。
(もっと読む)
乗員判別装置、及び、乗員判別方法
【課題】シートに着座した大人と、補助シートを用いて着座した子供を常時正確に判別することのできる乗員判別装置、及び、乗員判別方法を提供する。
【解決手段】乗員を含むシート1B上の対象物の距離画像データを取得する距離画像センサ4を設ける。距離画像センサ4で取得した距離画像データを基に、対象物全体の体積に対する乗員の上肢領域の体積比率を求める上肢比率算出手段30を設ける。上肢比率算出手段30で算出した比率が閾値以上の場合に大人であるものと判別し、算出した比率が閾値よりも小さい場合に補助シートに着座した子供であるものと判別する。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】対象物体が傾いている場合や対象物体のサイズが部分によって相違している場合でも、対象物体の位置を精度よく検出することのできる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10は、検出用光源12から検出光L2を出射し、検出対象空間10Rの対象物体Obで反射した検出光L2の一部を光検出器30で受光して対象物体Obの位置を検出する。また、入射光選択部20は、検出対象空間10R(空間10R1、10R2、10R3)のうち、一部の空間についてはこの一部の空間から光検出器30への反射光L3の入射が許容された選択状態とし、他の空間については他の空間から光検出器30への反射光の入射が阻止された非選択状態とする。また、入射光選択部20は、選択状態とされる空間および非選択状態とされる空間をZ軸方向で切り換える、
(もっと読む)
乗員検知装置
【課題】乗員とチャイルドシートとの存在を精度良く判定する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員の頭部領域を検知する頭部領域検知部52およびシートの領域を検知するシート領域検知部53と、シートの領域を距離画像から除去して得られるシート領域除去画像に基づき、頭部領域を有する乗員領域の体積を推定し、該体積が所定体積範囲内であるか否かを判定する体積判定部54と、乗員領域の体積が所定体積範囲内であると判定された場合に、頭部領域の断面画像と乗員領域の断面画像とを比較し、乗員の肩部の有無を判定し、乗員の肩部が存在すると判定された場合には乗員領域には大人が存在すると判定し、乗員の肩部が存在しないと判定された場合には乗員領域にはチャイルドシートおよび該チャイルドシートに着座した子供が存在すると判定する乗員判定部56とを備える。
(もっと読む)
形状計測装置および形状計測方法
【課題】1つのカメラの視野に入らない計測対象物の裏側の形状まで精度良く計測する装置および方法を提供する。
【解決手段】計測対象物に格子模様を投影する格子模様投影部と、計測対象物の周囲に配置された少なくとも1つの鏡と、計測対象物および鏡に映る計測対象物の鏡像の画像を撮影する少なくとも1つの撮影部と、計測対象物の画像と鏡像の画像の各々に対して位相解析処理を施して計測対象物の形状を算出するとともに撮影された前記計測対象物の画像と前記鏡像の画像とを合成する解析処理部とを備え、撮影部の各々は、計測対象物の少なくとも一部の領域と該少なくとも一部の領域の鏡像とを同時に撮影可能に配置されていることを特徴とする。
(もっと読む)
姿勢検出装置
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
対象物検出装置及び方法
【課題】広い監視領域における大きさが異なる複数の対象物の位置や速度を推定できるようにすること。
【解決手段】本実施形態に係る対象物検出装置は、複数台のカメラにより道路上に存在する対象物を撮影した基準画像上で分割した短冊状領域の各点に関して、他のカメラで撮影された参照画像上で対応する点を算出する対応点算出部4と、各短冊状領域内の各点と、求められた参照画像の対応点との間の画像特徴量の一致度を算出する画像一致度算出部5と、短冊状領域の高さと対象物の接地位置とを変数として画像特徴量の一致度を最大にする接地位置関数を生成する接地位置算出部6と、接地位置関数における短冊状領域の高さに基づいて対象物の高さを算出する対象物高さ算出部7とを備える。
(もっと読む)
81 - 100 / 953
[ Back to top ]