
Fターム[2F065FF15]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | エンコーダ利用 (505)
Fターム[2F065FF15]の下位に属するFターム
Fターム[2F065FF15]に分類される特許
41 - 60 / 156
内面形状測定装置、及び内面形状測定方法
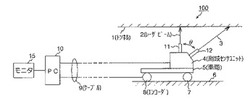
【課題】測定装置が傾斜した場合でも、管内面を正確に測定することができる管内面形状測定装置を提供する。
【解決手段】トンネル1に沿って鉛直方向にレーザビーム2を走査させて、トンネル1内面に照射したレーザビーム2の方位毎の測距データを出力する測域センサ11と、鉛直方向に対して所定の角度θに傾けた方向にレーザビーム3を走査させて、トンネル1に照射したレーザビーム3の方位毎の測距データを出力する測域センサ12と、測域センサ11、12をトンネル1の軸方向に移動する車両5と、車両5により測域センサ11、12を移動させた時のそれぞれの位置座標を検知するエンコーダ8と、測域センサ11、12により検出された測距データに基づいて車両5と管軸との傾き角度を算出し、エンコーダ8により検知された位置座標を、算出した傾き角度に基づいて補正して管内面の三次元表面形状を生成するPC10と、を備えて構成されている。
(もっと読む)
非球面形状測定装置

【課題】非球面形状を高精度に測定する際に、被測定物の着脱が正確な位置に作業性よく行える測定装置を提供する。
【解決手段】被測定物10を保持する被測定物保持機構Aと、測定光を照射して光干渉測定を行う干渉光学系2を有する干渉光学機構Bとは、それぞれ相対的に移動可能に設置されてなり、被測定物保持機構Aに被測定物10を先端に保持しエアスピンドルによる回転機構70で回転駆動されるサンプルステージ6と一体に回転する回転体64を設けるとともに、該回転体に形成された凹状の係合部64aに係合してその回転を規制する規制機構65を設け、被測定物の着脱時にはサンプルステージの回転を規制する。
(もっと読む)
空間座標測定システムおよび空間座標測定方法
【課題】 角度情報を使用せずに、距離情報のみでターゲットの空間座標を精度良く特定することができる空間座標測定システムおよび空間座標測定方法を提供する。
【解決手段】 この空間座標測定システムは、測定物W上に設けられた一つのターゲットTgの空間座標を求める空間座標測定システムである。空間座標がそれぞれ特定された少なくとも3個以上のレーザートラッカー1と、前記3個以上のレーザートラッカー1のうちの3個のレーザートラッカー1から、前記一つのターゲットTgに対しレーザー光Lbをそれぞれ照射させて測定した3箇所の距離の測定値と、前記3個のレーザートラッカー1の空間座標とから、前記ターゲットTgの空間座標を求める演算手段3とを有する。
(もっと読む)
ウエハアライメント装置
【課題】エッジ検出動作(装置の稼動)を中断することなく、貼り合わせウエハの製造プロセス全体にわたって必要とされるエッジ検出精度を確保することが可能なウエハアライメント装置を提供する。
【解決手段】このウエハアライメント装置100は、シリコンウエハ111とウエハ支持ガラス基板112とを含む貼り合わせウエハ110のエッジを検出するとともに、開始端21aが貼り合わせウエハ110の中心側に設定されたラインセンサ21と、ラインセンサ21に対向する光源22と、貼り合わせウエハ110のエッジの検出時に、ラインセンサ21を貼り合わせウエハ110の中心側からエッジ側に向かって走査するとともに、所定の場合に、シリコンウエハ111のエッジ検出と、ウエハ支持ガラス基板112のエッジ検出とを切り替えるように制御するコントローラ40とを備える。
(もっと読む)
光学測定システム
光学測定装置は、固定された主軸台(57)が取り付けられた基準支持体(40)、ならびに、固定された主軸台に対向し、および測定される部品を主軸台(57)と心押し台(60)との間で維持するために主軸台(57)に近づいてくる、またはそこから離れて移動するための線形軸(x)に沿って移動可能である、移動可能な心押し台(60)、ならびに線形軸(x)に沿って移動可能な可動式往復台(100)を含むものであって、往復台は、コリメート光束が測定中の部品によって遮られるようにx軸を横切って方向付けるための光源(110)を担持し、往復台は、光源(110)に配列され、および測定中の部品によって遮られなかったコリメート光束の残留光を受けるように配置されている光学検出器(120)を、さらに担持する。測定装置は、光学往復台(100)および心押し台(60)が摺動可能に係合されている基準支持体(40)上に固定されている直線状ガイド(47)を有するのに対し、主軸台(57)は、基準表面上に固定され、少なくとも一部が前記直線状ガイド(47)上に懸下している主軸台担持部(50)上に設置されている。  (もっと読む)
(もっと読む)
計測方法、露光方法及び露光装置、並びにデバイス製造方法
【課題】位置計測系の周期誤差が発生しても、精度良く周期パターンの位置を検出する。
【解決手段】可動ステージの位置を位置計測系を用いて計測し、その計測情報を用いて可動ステージを駆動するとともに、可動ステージ外の周期パターンから成る計測用マークを可動ステージに一部が配置された検出器を用いて検出する。ここで、位置計測系の計測周期(図10(B)及び10(C)に示される例では0.25μm)の自然数倍と異なるピッチ(図10(C)の例では2.03125μm(なお、図10(B)の例では2μm))の周期パターンを計測用マークとして用いることにより、計測周期に等しい位置計測系の周期誤差が発生しても、検出精度を損なうことなく、計測用マークの位置情報を計測することが可能となる。
(もっと読む)
非接触変位計測装置
【課題】短時間で且つ容易にワークの変位量を検出可能な非接触変位計測装置を提供する。
【解決手段】非接触変位計測装置は、ワーク12を載置可能に構成された測定テーブル13と、ワーク12の変位量を計測する第1〜第3レーザプローブ35a〜35cと、Y軸に沿って測定テーブル13から相対移動可能に構成され、Z軸方向に広がり且つX軸方向の測定テーブル13の両端に端部を有するゲート形状を有する第1ゲート状駆動部14Aとを備える。第1〜第3レーザプローブ35a〜35cは、ワーク12に光を照射すると共にその光に基づく反射光を受光し且つその反射光に基づきワーク12の変位量を計測する。第1ゲート状駆動部14Aは、ワーク12に対して少なくとも2方向からの光を照射させるように第1〜第3レーザプローブ35a〜35cを配置可能に構成されている。
(もっと読む)
形状測定装置
【課題】被検物の形状測定において、測定プローブと被検物との位置合わせ作業を簡単に
行うことが可能な構成の形状測定装置を提供する。
【解決手段】被検物に対して光プローブ20を相対移動させて、光プローブ20により得
られた情報から被検物の三次元形状を非接触で測定するように構成された形状測定装置に
おいて、光プローブ20を被検物に対して所定の位置となるように移動させる門型構造体
10と、被検物を少なくとも2つの回転軸方向に回転させる支持装置30とを有して構成
される。
(もっと読む)
回折格子の形状誤差評価方法
【課題】回折格子回折格子全面からの回折光波面を短時間に計測し、得られた波面情報に演算処理を施すことで、従来技術が持つコストと評価時間に関する課題を解決することを目的としている。
【解決手段】1軸回折格子10または2軸回折格子の全面に光を照射し、+1次回折光と−1次回折光のそれぞれの波面情報をフィゾー型干渉計11などの形状計測用干渉計で評価する。回折格子からの+1次回折光または−1次回折光と、フィゾー型干渉計12の内部に搭載されている参照用オプティカルフラット12からの参照光が重なり合うように、形状計測用干渉計に対して回折格子を相対的に傾ける。フィゾー型干渉計12により、回折光全面からの波面を一括に、且つ短時間に計測できる。得られた+1次回折光または−1次回折光の波面を減算処理することで、回折格子全面にわたるピッチばらつきを求めることができる。
(もっと読む)
タイヤ形状検査方法、及びタイヤ形状検査装置
【課題】凹凸マーク上に重なるように凹凸欠陥が存在する場合にも、本来の凹凸マークの高さ分だけを差し引いて凹凸欠陥のみの高さを算出・取得する。
【解決手段】サンプルタイヤのサイドウォール面の二次元画像であるサンプル原画像において、凹凸マークの輪郭である境界線を検出し、境界線の位置を示すマスク画像を生成するマスク画像生成工程と、サンプル原画像において、マスク画像に示された境界線の位置に対応する領域を除き、残りの領域の高さを離散的な複数の高さ閾値を用いて分類することで得られる高さオフセット画像を生成する高さオフセット画像生成工程と、検査タイヤのサイドウォール面の二次元画像である検査画像から、高さオフセット画像を差し引くと共に、マスク画像が表す境界領域を除去する差分処理工程とを経て、差分処理工程の結果として得られた凹凸除去画像に基づいて、検査タイヤのサイドウォール面の形状欠陥を検査する。
(もっと読む)
コークス炉壁観察装置のカメラ校正方法およびプログラム
【課題】校正用ターゲットを用いることなく、カメラ校正を実施することができるコークス炉壁観察装置のカメラ校正方法およびプログラムを提供する。
【解決手段】カメラ30をコークス炉10内に挿入し、炉壁画像OIを撮影し、炉壁画像OIを視点変換処理して視点変換画像TIを生成するコークス炉壁観察装置における、カメラ30の取り付けを校正するために、コークス炉10の形状を指標としてカメラ校正を行う。カメラ30の取り付け誤差の影響のない視点変換画像TIを生成することができ、炉壁全体画像WIの合成を行っても視点変換画像TIの繋ぎ目で不一致が生じることがない。校正用ターゲットを高温となるコークス炉内に設置する必要がない。
(もっと読む)
位置計測装置およびそれを用いた露光装置
【課題】 エンコーダシステムを用いた位置計測装置において、計測誤差による影響を低減させることを目的とする。
【解決手段】 対象物を搭載して移動可能な移動体と、前記移動体の位置を計測可能なエンコーダ型の第1の計測手段と、前記第1の計測手段による計測と同時に、前記移動体の位置を計測可能、あるいは前記対象物または前記移動体に形成されたマークの位置を検出可能な第2の計測手段と、前記第1および第2の計測手段の計測結果にもとづいて、前記第1の計測手段の計測誤差を算出し、該計測誤差にもとづいて前記第1の計測手段を補正する補正手段と、を備える。
(もっと読む)
位置測定装置
【課題】少なくとも一つの測定方向で互いに可動自在で配置されている二つの対象物の、位置を検出するための位置測定装置を提供する。
【解決手段】位置測定装置には光源および、光源から送られた光線を二つ以上の分光光束に分割する分光手段を含んでいる。分光光束は、少なくとも二つの分光光路を通過する。分光光路からの干渉分光光束が、多数の光電式検知要素に当たるので、変位に従う位置信号を検知要素を介して検出することができる。光源は、ファイバ格子逆カップリング手段付き半導体レーザとして構成されている。
(もっと読む)
形状測定装置
【課題】測定者に被測定物体に対するプローブの位置やライン光の照射角度をアシスト(支援)することができる形状測定装置を提供する。
【解決手段】光学式センサにより被測定物体51の形状を測定して測定情報を出力するプローブ12と、複数のアーム部11a及びプローブ12を回転可能に接続する2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bに設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、表示部30と、測定情報及び角度情報から、被測定物体51の形状情報を算出するとともに、形状情報を表示部30に出力する制御部20と、を有する形状測定装置100において、制御部20は、プローブ12の操作を支援するアシスト表示を表示部30に表示するように構成される。
(もっと読む)
形状測定装置
【課題】測定者の操作に応じて関節部の回転動作を補助するように構成された形状測定装置を提供する。
【解決手段】形状測定装置100は、光学式センサ40により被測定物体51を非接触で走査して当該被測定物体51の形状の測定情報を出力するプローブ12と、アーム部11a及び2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bの各々に設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、関節部11bに設けられ、当該関節部11bにより接続された一方のアーム部11a若しくはプローブ12を他方のアーム部11aに対して回転駆動させる駆動部15と、角度情報からプローブ12の移動を検出して駆動部15を作動させる制御部20と、を有する。
(もっと読む)
形状測定装置
【課題】測定者の位置や姿勢に関わらず、常に、被測定物体の測定結果を目視で確認することができる形状測定装置を提供する。
【解決手段】被測定物体51の形状を測定して測定情報を出力するプローブ12と、アーム部11a及び2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部と、関節部11bに設けられ、当該関節部11bが接続するアーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、表示部30と、測定情報及び角度情報から、被測定物体51の形状情報を算出するとともに、この形状情報を表示部30に出力する制御部20と、を有する形状測定装置100において、表示部30を、測定者の頭部に装着され、この測定者の少なくとも一方の眼前に形状情報を投影する投影部35を有するヘッドマウントディスプレイで構成する。
(もっと読む)
形状測定装置
【課題】形状測定中は移動機構部を固定することができる形状測定装置を提供する。
【解決手段】光学式センサ40により、静止した状態で被測定物体51の表面を測定して測定情報を出力するプローブ12と、アーム部11a及び少なくとも2以上の関節部11bを有し、所定の空間内でプローブ12を移動可能に支持する移動機構部11と、関節部11bに設けられ、アーム部11a間、若しくは、アーム部11aとプローブ12との角度情報を検出するエンコーダ21と、関節部11bを被測定物体51に対して静止させるロック機構部15と、光学式センサ40により測定情報を取得し、エンコーダ21から角度情報を取得して、被測定物体51の形状情報を算出する制御部20と、を有する形状測定装置100において、制御部20は、光学式センサ40により被測定物体51を測定するときに、ロック機構部15を作動させて関節部11bを静止させるように構成される。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
可動物体の位置依存信号を測定するための測定システム、リソグラフィ装置および方法
【課題】測定精度が可動物体の動作によって実質的にほとんど影響されない、可動物体の位置依存信号を測定するように構成された好ましくはエンコーダ型高精度測定システムを提供する。
【解決手段】エンコーダ型測定システムは可動物体の位置依存信号を測定するように構成され、可動物体の上に取付け可能な少なくとも1つのセンサと、実質的に静止したフレームの上に取付け可能なセンサターゲットと、実質的に静止したフレームの上にセンサターゲットを取付けるように構成された取付けデバイスとを含む。実質的に静止したフレームに対するセンサターゲット物体の移動および/または変形を補償するように構成された補償デバイスをさらに含む。補償デバイスは受動型または能動型制振デバイスおよび/またはフィードバック位置制御システムを含むことができる。代替の実施形態において、補償デバイスは、センサターゲット物体の位置を固定する把持デバイスを含む。
(もっと読む)
長さ測定装置
【課題】高い精度を有して良好に操作でき且つ安定な長さ測定装置を創作すること。
【解決手段】長さ測定装置は、支持体(12)とその支持体に摩擦の乏しく固定された物差し(11)とを包含する構成ユニット(1)を有する。支持体(12)は位置測定するために、測定すべき物体(13)に固定式に固定できる。さらに、保持体(3)が設けられていて、この保持体により物差し(11)が固定点(P)に支持体(12)を避けて測定すべき物体(13)に固定できる。
(もっと読む)
41 - 60 / 156
[ Back to top ]