
Fターム[2F065FF15]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | エンコーダ利用 (505)
Fターム[2F065FF15]の下位に属するFターム
Fターム[2F065FF15]に分類される特許
141 - 156 / 156
放射線を放射する要素の位置を測定するシステム及び方法
放射線エミッタの位置を測定するタッチパッドのような方法及びシステムであり、放射線エミッタはスタイラス、ペン、ポインタ等の能動的に放射線を放射するものでも、受動的な放射線を散乱/反射/拡散する要素でもよい。放射線はバーコード要素で変調され、少なくとも1次元のセンサ上に供給される。検出器の出力から、放射線エミッタの位置が測定される。このシステムは、標準的なタッチパッド、壁ないしは黒板やホイワイトボード上で使用するマーカのような外部のエミッタの位置の検出用、又はタッチパッド等の「内部」位置について使用できる。 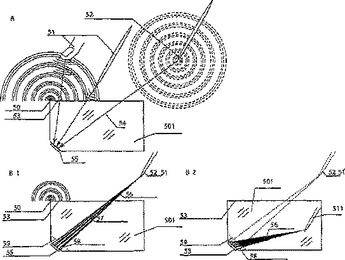 (もっと読む)
(もっと読む)
試料検査装置及び試料検査方法

【目的】 2次元の補正が可能なレチクル検査装置を提供することを目的とする。
【構成】 レチクル101上のX座標位置を測定するX軸レーザ干渉計201とX軸レーザスケール202と、前記レチクル101上のY座標位置を測定するY軸レーザ干渉計211とY軸レーザスケール212と、前記レチクル101上の光学画像を取得する光学画像取得部となるレーザ光学装置103、及び透過光検出部105等と、前記レチクル101上の複数の所定の位置における設計上のXY座標と前記X軸レーザ干渉計201とX軸レーザスケール202と前記Y軸レーザ干渉計211とY軸レーザスケール212とにより測定される前記複数の所定の位置のXY座標とに基づいて、前記光学画像取得部により取得された前記光学画像の位置を補正する光学画像補正部140と、補正された位置で前記光学画像と所定の参照画像とを比較する画像比較部108と、を備えたことを特徴とする。
(もっと読む)
光切断測定装置及び輝線像撮像装置

【課題】
光切断法によりギャップ又は段差を測定する際に、測定対象面上に二次元的に分布する多数の測定点のデータをどこでも迅速且つ正確に測定できるようにする。
【解決手段】
測定対象面(S)に対してスリット光を照射する光源装置(10)と、測定対象面(S)に形成されたスリット光の輝線像をその照射光軸と異なる方向から撮像する撮像カメラ(11)が内蔵されたハンドセット(2)に、スリット光による輝線像と直交する方向に回転する走行ローラ(7R,7L)が配され、走行ローラ(7R,7L)の回転によりハンドセット(2)の移動距離を検知するセンサ(12)が配され、該センサ(12)の検出距離に基づきハンドセット(2)が予め設定された一定距離移動するごとに前記撮像カメラに(11)で撮像された画像データを取り込んで、その画像データと予め設定された基準長さデータとを比較することによりギャップ又は段差を測定する画像処理装置(4)を備えた。
(もっと読む)
駆動装置
【課題】 移動体の位置検出ポイントが広い間隔をあけて複数存在する場合でも、移動体を高い精度で位置決めすることができる駆動装置を提供する。
【解決手段】 磁界を発生させる磁界発生部材7と、磁界を検出する第1,第2,第3の磁界検出素子6A,6B,6Cから成る磁界検出手段6と、磁界発生部材7を移動させる圧電アクチュエータPとを備える。磁界検出手段6での検出結果に基づいて磁界発生部材7と磁界検出手段6との相対的な位置決めを行う際、磁界発生部材7が移動する可動範囲において、所定領域では第1,第2の磁界検出素子6A,6Bの検出結果に基づいて第1の位置決めを行い、所定領域から離れた所定ポイントでは第3の磁界検出素子6Cの検出結果に基づいて第2の位置決めを行う。
(もっと読む)
位置測定システム
【課題】レーザー光源のモードジャンプの問題を簡単な方法で防止した位置測定システムを提示することである。
【解決手段】二つの物体の相対位置を測定する位置測定システムが、レーザー光源(3)に対する可変動作電流を生成するための電流供給ユニット(1,2)を有する。少なくとも一つの光検出器(13.1,13.2,13.3)が、レーザー光源(3)から受けた光より位置に依存する出力信号(−120°,0°,+120°)を生成する。測定動作では、電流供給ユニット(1,2)からレーザー光源(3)に、交流電流成分と重畳した直流電流を供給する。
(もっと読む)
移動再帰反射器を測定する絶対距離計
増分干渉計を使用することなく、移動外部再帰反射器またはそのほかの移動目標表面の1またはそれを超える次元の絶対距離測定および/または表面走査および/または座標測定が可能なレーザ・デバイスおよび方法。  (もっと読む)
(もっと読む)
画像取得装置
【課題】発光ダイオードを用いて移動する対象物上の所定領域の画像を精度よく取得する。
【解決手段】画像取得装置1は、対象物9を連続的に移動するコンベア2、および、コンベア2の上方に設けられたヘッド部3を備える。ヘッド部3は、フラッシュ光を出射するLED31、対象物9にフラッシュ光を導くとともに対象物9からの光が入射する顕微鏡32、および、顕微鏡32により所定の倍率で結像された対象物9の像を電気信号に変換する撮像デバイス33を有する。画像取得装置1では、連続点灯時の許容電流を超える電流がLED31に入力されて、コンベア2により移動する対象物9に対してフラッシュ光が照射され、対象物9上の検査領域の画像が取得される。これにより、LED31を用いて移動する対象物9上の検査領域の画像を精度よく取得することができる。
(もっと読む)
光学特性測定装置及び方法、更に前記光学特性測定装置を用いた半導体露光装置及び露光方法、半導体デバイス製造方法
【課題】 高精度に被検光学系の光学特性を測定する測定装置及び方法を提供する。
【解決手段】 上記課題を解決するため、本発明に係る被検光学系の光学特性を干渉を用いて測定する測定装置は、光源からの光により照明され、球面波を生成する球面波生成手段と、前記光源からの光を分割する光分割手段と、前記球面波生成手段と前記光分割手段とを通過し、2つの球面波となって前記被検光学系に入射した光のうち一方の光が集光する位置にスリットが配置されたスリットを有するマスクと、前記スリットを通過した光と、前記被検光学系を経てスリットを通過しない光とで形成される干渉縞を受光する受光手段とを有することを特徴としている。
(もっと読む)
画像測定機、およびデータ作成装置
【課題】画像測定機において、被検物の輪郭形状を測定する場合の測定時間を短縮させる。
【解決手段】画像測定機にステージ5上に載置された被検物6を撮像して撮像した画像を出力する撮像部4と、ステージ5上に載置された被検物6を撮像部4が撮像する撮像位置に対して相対移動させる移動装置と、制御ユニット2とを設け、制御ユニット2に、移動装置を制御して、予め設定された被検物の測定点の位置を撮像部4に相対移動させ、かつ撮像部4に撮像位置における被検物6の画像を撮像させて出力させる撮像制御部と、撮像部4が出力する画像内の複数の測定点の座標値を求める画像処理部と、被検物6の測定点の位置を撮像位置に移動させる際の複数の候補位置を求めて、複数の候補位置のうち、測定点が最も多く含まれる候補位置を次に移動する位置に決定する位置決定部とを設ける。
(もっと読む)
リソグラフィ機器及びそれを較正する方法
【課題】基板テーブル及びこの基板テーブルの移動を制御する移動制御システムを含むリソグラフィ機器を提供すること。
【解決手段】移動制御システムは、基板テーブルWTの位置を検出するように構築された少なくとも3つの位置検出器P1〜P5を含む。基板テーブルWTの位置及び向きを測定するために、各位置検出器P1〜P5は、1次元又は多次元のタイプの光学式エンコーダを備える。これらの光学式エンコーダは、合わせて少なくとも6つの位置の値を提供するように配置され、3次元の各次元ごとに少なくとも1つの位置の値が提供される。
(もっと読む)
位置検出装置および位置制御装置
【課題】 簡単な構成で小型化ができ、機構的に柔軟性を有する位置検出装置および位置制御装置を安価に提供する。
【解決手段】 位置検出装置は、線条体1と光学式センサ4を備える。線条体1はこれより細い2本の線条体1a、1bを撚り合わせて形成してあり、表面に2色の繰り返しパターンとしてのらせん状パターンを形成している。光学式センサ4は線条体1に対向して配置され、受光素子2a、2b、発光素子3を備える。発光素子3から射出された光は、線条体1a、1bの表面で反射するので、受光素子2aは線条体1aから反射した入射光を検出し、受光素子2bは線条体1bから反射した入射光を検出する構成とする。
(もっと読む)
インクジェットプリンタ
【課題】 信頼性の高いエンコーダ信号の発信と走査量以外の多岐な情報を提供できる高機能なエンコーダを備えたインクジェットプリンタを提供する。
【解決手段】 キャリッジ1を主走査方向に移動させるとともに、記録媒体2を副走査方向に搬送して記録を行うインクジェットプリンタであって、キャリッジ1及び記録媒体2の走査量をエンコーダスケール4、6に記載されたスケールパターンを検知して制御するインクジェットプリンタにおいて、スケールパターンを検知するエンコーダセンサ5、8は、スケールパターンを形成するマークの形状を認識できる撮像手段を有し、この撮像手段を用いて走査量を検知する。
(もっと読む)
3次元測量装置及び電子的記憶媒体
[課題] 本発明は、測量装置と撮像装置とにより3次元座標データを演算するための3次元測量装置等に係わり、特に、測量装置により対応点の位置を決定し、ステレオ表示が可能な3次元測量装置を提供することを目的とする。
[解決手段] 本発明は、測量装置により計測された少なくとも3点の基準点の位置と撮像装置による画像とから、撮像装置の傾き等を算出し、測量装置により計測された視準点の位置から、撮像装置の傾き等を算出し、視準点を対応点として撮像装置の画像のマッチングを行い、測量装置が測定した視準点の位置と、マッチングを行った画像にある視準点とを関連付け、その関連付けに基づき測定対象物の3次元座標データを演算することができる。
(もっと読む)
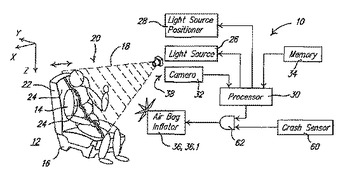
乗員検出システム
カメラ(32)は、光源ポジショナ(28)により配置された光カーテン(18)により物体上に投射された光ストライプ(22)の連続画像を取り込む。これから背景画像を差し引き(616)、得られた画像をビニング(618)により強調し、閾値アルゴリズム(620)により2値化し、細線化し(622)、補間し(624)、そして格納する(626)。補間画像は、複数の光ストライプ(22)について取り込む。プロセッサ(30)は、非ゼロカメラピクセルについて計算した直交座標から3D表面モデルを生成する(1604)。容量表示は、近接表面、例えば着座表面(24)のモデルに対する、物体表面のオフセットから決定する(1610)。物体は、例えば訓練可能パターン認識システムによって、3D表面モデルの3D形状デスクリプタ(1606)および容量表示(1610)またはその一部(1612)に応答して分類される(1614)。車両(12)内の乗員(14)の検出は、安全拘束システム(36)の制御に用いることができる。
 (もっと読む)
(もっと読む)
カメラを備えた機器を制御システムによって所望位置へ動かす方法及びその制御システム
制御システム(7)によってカメラ(5)を備えた機器(4)を所望位置(10)へ動かす方法。カメラ(5)は、制御システム(7)に接続されている。動かしている間、カメラによって写真が撮影される。制御システム(7)によって単位時間あたりに処理される写真の枚数は、機器(4)と所望位置(10)の間隔が短くなると、増加される。
 (もっと読む)
(もっと読む)
二次元測定対象物をピクセル毎に光電測定するための装置
【課題】 一般的なタイプの測定装置を、カラー測定に適するように改良すること。
【解決手段】 二次元の測定対象物をピクセル毎に光電測定するための装置は、測定対象物(M)を二次元CCDイメージセンサ22上に結像するための投影手段3,21と、イメージング光路に設けられ且つイメージセンサ上に衝突する測定光の波長選択フィルタリングを行なうフィルタ手段66と、イメージセンサによって形成された電気信号を処理するとともに、その電気信号を対応する生のデジタル測定データ71に変換する信号処理手段23と、生の測定データを、測定対象物の各画像要素の色を示す画像データ72に処理するためのデータ処理手段7とを有している。
(もっと読む)
141 - 156 / 156
[ Back to top ]