
Fターム[2F065FF17]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | エンコーダ利用 (505) | ロータリー (156)
Fターム[2F065FF17]に分類される特許
1 - 20 / 156
レーザトラッカー
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
投影装置、3次元計測装置並びにその制御方法およびプログラム
傾斜測定装置およびその方法
3次元計測装置およびそれに用いられる照明装置
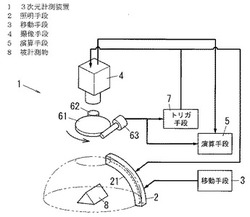
【課題】被計測物を精度よく計測することができる3次元計測装置およびそれに用いられる照明装置を提供する。
【解決手段】3次元計測装置1は、被計測物8に円偏光を照射する照明手段2と、照明手段2を移動させる移動手段3とを備える。また、3次元計測装置1は、被計測物8の被照射面からの反射光を受けて上記被照射面を撮像する撮像手段4と、撮像手段4で撮像された撮像画像を用いて反射光の偏光状態を検出し、被計測物8の被照射面の向きを求める演算手段5とをさらに備える。照明手段2は、円偏光を被計測物8の一部に照射する。移動手段3は、被計測物8において被照射面の位置が変わるように照明手段2を移動させる。
(もっと読む)
角度測定方法及び角度測定システム

【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】エンコーダ本体2aに対する回転軸3の相対的な回転角を検出するロータリエンコーダ2と、エンコーダ本体2a及び回転軸3から切り離され、エンコーダ本体2aの回転角を検出する非接触角度検出手段20(レーザ干渉式検出手段)とを備える。これにより、ロータリエンコーダ2が検出した回転角を、非接触角度検出手段20で検出した回転角に基づいて補正することができ、回転角を高精度且つ短時間で測定することが可能となる。
(もっと読む)
管の内面曲がり測定装置およびそれを用いた測定方法
【課題】管の内面曲がりを定量的に測定できるとともに、様々な内径の鋼管に対応できる管の内面曲がり測定装置およびそれを用いた測定方法を提供する。
【解決手段】被測定材である管の長手方向に移動可能なヘッド21と、ヘッド21によって管10の周方向に揺動可能に支持され、管10の内面までの距離を測定する第1距離計22と、管10の長手方向におけるヘッド21の位置を測定する第2距離計(図示なし)と、ヘッド21の移動および第1距離計22の揺動を制御する制御手段とを備えることを特徴とする管の内面曲がり測定装置20である。本発明では、内面曲がり測定装置20が管10の長手方向に垂直な面におけるヘッド21の変位を測定する変位計を備え、ヘッド21を、管10を長手方向を水平にした状態で該管の内面上を走行する走行機構、および、第1距離計22の揺動軸を水平に維持する維持機構を有する走行装置に設けるのが好ましい。
(もっと読む)
タイヤ厚み測定装置
【課題】内圧を負荷した状態でタイヤの厚みを計測可能なタイヤ厚み測定装置を提供する。
【解決手段】上側ハーフリム84でタイヤ30の一方のビード部を支持し、下側ハーフリム26で他方のビード部を支持し、タイヤ内を密閉して内圧をかける。内側レーザー変位計66から外側レーザー変位計122までの距離からタイヤ内空部に配置した内側レーザー変位計66で計測したタイヤ内面までの距離とタイヤ外側に配置した外側レーザー変位計122で計測したタイヤ外面までの距離とを引き算する。これにより、内圧を負荷した状態でタイヤの厚みを計測することが出来る。
(もっと読む)
ボンディング装置
【課題】サーチ動作又はボンディング前のボンディング点の高さ測定を行うことなしに、高速でボンディングが可能なボンディング装置を提供すること。
【解決手段】上下方向に揺動可能なボンディングアームに搭載されて、被ボンディング部品の表面に位置するボンディング点の合焦点の検出を行う共焦点光学系と、前記ボンディングアームと一体に可動してボンディングを行うボンディングツールと、前記ボンディングツールの位置を検出する位置検出手段と、を有し、ボンディングツールのボンディング点への下降中に、共焦点光学系による合焦点検出により位置検出手段で検出したボンディングツールの位置から、前もって設定したボンディング点までの所定の距離(合焦点基準下降量)をボンディングツールが下降して、ボンディング点上で停止するように制御する。
(もっと読む)
測定装置
【課題】内径の異なる種々の穴形状を精度良く測定できる測定装置を提供すること。
【解決手段】被測定領域の少なくとも一部の面の法線方向とは異なる方向から前記被測定領域に照明光を照射することで被測定領域に帯状の照明領域を形成する照明系と、前記照明系による照射方向と前記帯状の照明領域における長手方向等を含む面からはずれた位置から照明領域の散乱光を受光する受光系と、受光系の受光結果に基づいて被検面の形状を算出する演算部と、を備える。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転が規制された非回転体であるエンコーダ本体2aと、エンコーダ本体2aに回転自在に軸支された回転体である回転軸3とを有し、エンコーダ本体2aに対する回転軸3の相対的な回転角度を検出する相対的角度検出手段としてのロータリエンコーダ2と、エンコーダ本体2aの絶対的な回転角度を検出する絶対角度検出手段としての非接触角度検出手段20とを備える。これにより、ロータリエンコーダ2が検出した回転角度を、非接触角度検出手段20で検出した回転角度に基づいて補正することができ、回転角度を高精度且つ短時間で測定することが可能となる。
(もっと読む)
路面画像処理システム及び路面画像処理方法
【課題】ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【解決手段】本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
(もっと読む)
ふく進測定装置、ふく進測定システム及びふく進測定方法
【課題】簡素な構成でふく進量測定の作業効率や測定精度等を向上させる。
【解決手段】ふく進測定装置4は、鉄道のレール6R,6L上を走行する車両5に搭載され、車両走行中に、レール6R,6Lから側方に離れた位置で地面と一体的に設けられた基準マーカ2R,2Lと、レール6R,6Lと一体的に設けられたレールマーカ3R,3Lとを撮影するラインセンサ11R,11L,12R,12Lと、ラインセンサ11R,11L,12R,12Lで撮影された画像上において基準マーカ2R,2L及びレールマーカ3R,3Lを検出する画像処理部と、画像処理部で検出された情報から基準マーカ及びレールマーカのレール長手方向の位置を算出する位置算出部と、位置算出部で算出された各位置からレール6R,6Lのふく進量を算出するふく進量算出部と、を備えている。
(もっと読む)
テープギャップ測定のためのポータブルゲージ及びその方法
【課題】テープギャップの手動測定は労働集約的であるため、構造物の大きな領域にわたる複数のテープギャップの測定を正確かつ効率的に実行し、しかもオペレーターの技能に大きく依存しないテープギャップの測定方法及び装置を提供する。
【解決手段】表面を構成する複合テープの細片間のギャップはゲージによって測定される。表面に沿ってゲージを移動するにつれて隣接するテープ細片のエッジの位置は検出され、隣接する細片間のギャップは検出したエッジの位置に基づいて計算される。
(もっと読む)
測定補助器具およびそれを用いた直径測定方法
【課題】 円環状の測定対象物に対してレーザトラッカーから見て反対側の周面の空間座標を測定することを可能にし、測定時の取扱いが簡単で、一人でも容易に直径を測定することができる測定補助器具を提供する。
【解決手段】 測定補助器具20は、ターゲットTgが設置されるターゲット設置部21と、ターゲット設置部21を測定対象物Wの円周方向に移動させる移動機構部22とを備える。移動機構部22は、測定対象物Wの測定対象周面である外周面Waに転接する第1の周面接触部材26と、測定対象物Wの内周面Wbに転接する第2の周面接触部材27と、測定対象物Wの上端面Wcに転接する端面接触部材28とを有する。第1の周面接触部材26は、ターゲット設置部21の中心を通る鉛直方向の軸O1回りに回転自在である。第1または第2の周面接触部材26,27を回転させる移動用回転駆動源41を設ける。
(もっと読む)
エンコーダ及び校正方法
【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
ビードスティフナーの検査方法及び検査装置
【課題】ビードスティフナーの接合部分の検査において、基準形状と比較することなくビードスティフナーの形状を正確に測定して良否判定の精度を向上させるビードスティフナーの検査方法及び検査装置を提供する。
【解決手段】環状のビードコアと、帯状に成形され、延長方向の端部と端部とを互いに接合させてビードコアの外周に巻きつけられたスティフナーとを有するビードスティフナーの良否を判定する検査方法であって、ビードスティフナーの断面形状の形状データを取得する工程と、形状データからビードコアの頂点を検出する工程と、頂点から指定された領域内にスティフナーの端部の有無を検出する工程とを含み、スティフナーの端部の有無に基づいてビードコアとスティフナーとの接合の良否を判定する。
(もっと読む)
3次元計測装置
【課題】被計測物を搬送するとともに、被計測物の3次元形状の全周を搬送の途中で停止させることなく非接触で計測することのできる3次元計測装置を提供する。
【解決手段】搬送経路の途中に被計測物Wの搬送方向Aに対して直交する左右方向に沿って計測隙間13が設けられた搬送装置3と、計測隙間13を通過する被計測物Wのステレオ画像を少なくとも計測隙間13の上方および下方のそれぞれで予め設定された計測周期毎に光学的に読み取ってステレオ画像を撮像し、そのステレオ画像の画像データを撮像し、それぞれのステレオ画像を画像データに変換してデータ処理装置5に出力するステレオカメラ21を有する撮像装置4と、ステレオカメラ21により計測周期の1周期毎に撮像されたそれぞれの画像データを合成する処理を連続して行うデータ処理装置5とを設ける。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 シリンドリカルレンズ59が、ガラス管Gに出射されるレーザ光をY軸線方向に集光させて、ガラス管GにX軸線方向に延びたライン状のレーザ光を照射する。Y軸方向サーボ回路119は、4分割フォトディテクタ62及びY軸方向エラー信号生成回路118によって検出されたY軸方向エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に照射されるようにガルバノミラー56を回転駆動するモータ57をサーボ制御する。また、Y軸周り角度サーボ回路122は、4分割フォトディテクタ62及びY軸周り角度エラー信号生成回路121によって検出されたY軸周り角度エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に垂直に照射されるようにガルバノミラー54を回転駆動するモータ55をサーボ制御する。
(もっと読む)
ロボット装置
【課題】高精度なエンコーダーを用いずに、可動部の位置制御を高精度に行うロボット装置を提供する。
【解決手段】基体1と、基体1に対して駆動可能な可動部2と、可動部2を駆動するアクチュエーター3と、可動部2とともに動く部分に取り付けられた慣性センサー4と、画像を撮影し画像により慣性センサー4の位置または角度を検出する絶対位置検出部として、画像センサー5及びマーカー6と、画像センサーにより検出された位置情報の間を、慣性センサー4の信号で補間する演算部9と、を備える。
(もっと読む)
1 - 20 / 156
[ Back to top ]