
Fターム[2F065GG13]の内容
光学的手段による測長装置 (194,290) | 光源 (11,799) | 光源形態 (1,634) | 点の配列 (783)
Fターム[2F065GG13]の下位に属するFターム
Fターム[2F065GG13]に分類される特許
161 - 180 / 423
発光装置及び対象物の追尾方法

【課題】発光装置(対象物)の位置を追跡しつつ、データの読み取りも円滑に行うことが可能な技術、発光装置を提供する。
【解決手段】「色彩の変化の変化(変化の切り替え)」でデータを表す発光装置を提供する。最初の1次変化で、その物体の特定、位置の特定を行い、その後、いわば2次変化(1次変化の切り替え)でデータを表している。したがって、物体の位置の特定を行いつつ、自由にデータを表すことが可能となったものである。
(もっと読む)
反射検出装置、表示装置、電子機器、および、反射検出方法

【課題】反射型検出を高度化する。
【解決手段】表示面11と、表示面11内で少なくとも一方向に非連続な出射領域をもつ赤外光L(IR)を出力する検出光出力部50と、赤外光L(IR)が表示面11から外部に出射され、外部で反射されて表示面11から入射するときの反射検出光を受光し、当該反射検出光の分布に応じた検出信号を出力する複数の受光素子36と、を有する。
(もっと読む)
軌道変位測定装置
【課題】 軌道異常を安価な構成で確実に検出することのできる軌道変位測定装置を提供する。
【解決手段】 鉄道軌道(32)あるいは軌道近傍に配置した複数の撮影用ターゲット(A1〜A4、B1〜B4)と、これら複数のターゲットがすべて含まれる画像を撮影するデジタルカメラ11と、このデジタルカメラの撮影時刻を制御し、撮影画像の保存および該撮影画像を用いた各ターゲットの座標演算ならびに演算結果を保存する制御ユニット10とからなる。制御ユニットは、撮影画像からターゲットの座標を演算し、撮影ごとの座標の演算結果をもとに運用開始からの座標の経時変化から軌道の変位を測定する。
(もっと読む)
位置計測システム
【課題】対象物の位置の測定および符号の識別を簡易かつ高精度に実現することができる位置計測システムを提供する。
【解決手段】対象物に配置された基準点であって、多角形の頂点、または多角形の頂点および重心に配置された4つ以上の第1基準点と第1基準点に対し特定の位置関係をなして配置された1つ以上の第2基準点とを撮影するカメラ20と、このカメラ20により撮影された第1基準点および第2基準点の画像の位置関係に基づき、第1基準点の画像と第2基準点の画像とを識別し、さらに識別された第1基準点の画像の位置関係に基づき、対象物の三次元位置および三軸角度を演算する演算装置30とを備える。
(もっと読む)
被膜の境界を検出する装置
【課題】 電池電極用シート等に形成された被膜の境界位置を、被膜が薄くても計算することができる技術を提供する。
【解決手段】 電池電極用シート2(測定対象物)に形成された被膜の境界を検出する装置が、電池電極用シート2上の表面にスリット光を照射するレーザ光源41,42(照射手段)と、スリット光が投影されている電池電極用シート2の表面を撮影するCCDカメラ51,52(撮影手段)と、CCDカメラ51,52による撮影画像から、撮影されたスリット光の線幅が不連続に変化する線幅変化点を特定する線幅変化点特定手段65(第1特定手段)と、特定された撮影画像における線幅変化点の位置から、電池電極用シート2の表面に形成された被膜の境界位置を計算する第1境界計算手段68を備えている。
(もっと読む)
洗車機における車形検出方法及び車形検出装置
【課題】洗車内容に応じた車体検出のしきい値を設定しながらも、車体の装備品を確実に検出することができる洗車機における車形検出方法及び車形検出装置を提供する。
【解決手段】車形検出装置9は、洗車処理装置5cよりも先行する洗車機の前方に備え、対向した発光素子の発光に伴う受光素子で車体検出と判断するしきい値は、実行しようとする洗車の内容が高圧スプレー洗浄を含むものであるとき、自動車もしくは洗車機が走行を開始してから前記洗車処理装置5cによる高圧スプレー洗浄が実行されるまでは大きく設定され、高圧スプレー洗浄が実行されてからは小さく設定される。
(もっと読む)
封筒フラップ封緘検査装置
【課題】未封緘の封筒を高い信頼性で検出でき、環境問題がなく、封筒を損傷せず、生産性の高い封筒フラップ封緘検査装置を提供する。
【解決手段】フラップ先端辺の方向に対して直角方向に封筒を搬送する搬送手段と、封筒の搬送位置を検出する搬送検出手段と、搬送位置を入力しフラップ先端辺の近傍において開となるゲートを生成するゲート生成手段と、搬送経路の上方から封筒表面の変位を所定のサンプリング周期で検出し変位データを出力する変位センサと、ゲートが開となっている間の変位データを記憶する記憶手段と、記憶した変位データに対して差分演算を行い差分変位データを生成する差分演算手段と、差分変位データのすべてが所定値内であるときに封緘状態を良と判定し、それ以外は不良と判定する良否判定手段とを具備する。
(もっと読む)
端面観察装置
【課題】被観察物の端面が,面取り加工された光沢性の強い端面であっても,その端面の広い範囲を一望できる撮像画像を得ること。
【解決手段】光を透過させて透過光を拡散させる拡散板が,被観察物1の端面からその端面に連なる表裏両側の面に渡る範囲に対して内側の面が対向する屈曲形状又は湾曲形状に形成され,その外側に配置されたカメラ30の位置から被観察物の端面1aが見える覗き窓14が設けられた光拡散部材11と,その光拡散部材11の外側に配列され,光拡散部材11を介して端面1aを照明する複数のLED12と,前記覗き窓14に向かうカメラ30の光軸方向に交差する方向へ光を照射するLED21及びレンズ22と,カメラ30と前記覗き窓14との間においてLED21からの光を反射して前記覗き窓14を通じて端面1aに照射するとともにその端面1aからの反射光をカメラ30側へ通過させるハーフミラー23とを備える。
(もっと読む)
光学式測定装置
【課題】軟質の被測定物に対してダメージを与えることを防止でき、かつセンサの検出能力の安定化を図ることができるとともに、作動距離の長い対物レンズを使用できる光学式測定装置を提供すること。
【解決手段】光学式測定装置1は、対物レンズ61を、被測定物が載置されたテーブル40に対して移動させて被測定物の画像を撮像し、被測定物の撮像画像から被測定物の寸法等を測定する。この光学式測定装置1は、対物レンズ61の周囲に設けられて対物レンズ61への物体の接近を検出する反射型光電センサ62と、反射型光電センサ62によって物体への接近を検出した場合に、対物レンズ61の物体への衝突を回避する衝突回避手段3とを備えている。
(もっと読む)
携帯電子機器
【課題】複数の反射部における反射効率の違いを利用することなく、光学的に2つの筐体間の相対的な回転位置を検出することができる携帯電子機器を提供すること。
【解決手段】光Rを発光する第1発光部51と、第1発光部51が搭載される第1筐体2と、光Rを受光する第1受光部61と、第1受光部61が搭載されるとともに第1筐体2に対して回転軸41を中心に回転可能に連結される第2筐体3と、第1受光部61における第1発光部51から発光された光Rの受光の有無を検出することにより、第1筐体2に対する第2筐体3の回転位置を検出する検出部と、を備え、第1発光部51は、第1筐体2において、回転軸41を中心とする第1の円周C1上に配置され、第1受光部61は、第2筐体3において、回転軸41を中心とするとともに第1の円周C1に対向する第2の円周C2上に配置されている。
(もっと読む)
モーショントラッカ装置
【課題】 飛行体等の基準対象物に対して、頭部装着型表示装置付ヘルメット等の測定対象物があらゆる方向に向いても、基準対象物に対する測定対象物の動きを測定することができるモーショントラッカ装置の提供。
【解決手段】 測定対象物10に取り付けられた光学マーカー7と、基準対象物30に取り付けられたカメラ装置2と、相対情報を算出する相対情報算出部33とを備えるモーショントラッカ装置1であって、基準対象物30に取り付けられ、かつ、光を反射する反射板5と、第一画像15及び第二画像16において光学マーカー7が直接撮影されたか、或いは、反射板5を介して撮影されたかのいずれであるかを判定した判定結果情報を作成する判定結果情報作成部34とを備え、光学マーカー位置情報算出部32は、判定結果情報と第一画像15及び第二画像16とに基づいて、光学マーカー位置情報を算出することを特徴とする。
(もっと読む)
指示装置、対象物認識装置およびプログラム
【課題】対象物を特定するのに、操作するユーザの使い方に依存しにくい指示装置等を提供する。
【解決手段】発光点からなる複数の基準点集合と、発光点を基準点集合毎に点灯し、1つの基準点集合の発光点が点灯するときは、1つの基準点集合以外の発光点は消灯する制御手段と、を有し、基準点集合は、互いの位置関係が特定されている平面上の3つ以上の第1基準点と第1基準点との位置関係が特定されている1つの第2基準点とからなり、カメラ20にて撮影された基準点集合の第1基準点の画像および第2基準点の画像の位置関係から対象物300が特定されることを特徴とする指示装置100。
(もっと読む)
表面形状測定装置
本発明は測定対象物の表面の2Dイメージを撮像する表面形状測定装置に関する。本発明による表面形状測定装置は、第1単色光を前記測定対象物の表面に照射する第1光源と;前記第1単色光と相異なる色相の第2単色光を前記測定対象物の表面に照射する第2光源と;前記第1光源及び前記第2光源から照射されて前記測定対象物の表面で反射した前記第1単色光及び前記第2単色光を撮像する白黒カメラと;前記第1単色光及び前記第2単色光が前記測定対象物の表面にそれぞれ照射される状態で前記第1単色光及び前記第2単色光にそれぞれ対応する第1白黒イメージデータ及び第2白黒イメージデータが獲得されるように前記第1光源、前記第2光源及び前記白黒カメラを制御し、前記第1白黒イメージデータ及び前記第2白黒イメージデータを利用して前記測定対象物の表面に関する合成カラーイメージを生成する制御部とを含むことを特徴とする。これにより、低コストの白黒カメラを利用してカラー2Dイメージが獲得でき、カラーカメラより処理速度が速い白黒カメラを利用することによって処理速度も向上することができる。 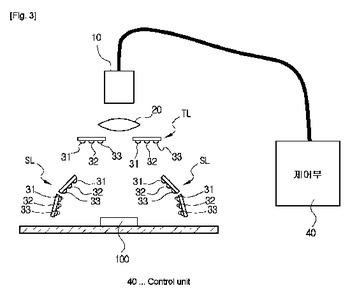 (もっと読む)
(もっと読む)
画像認識装置及び画像認識方法
【課題】個々間で厚さにばらつきのある薄膜部材のパターンマッチングを安定して行うことができる画像認識装置及び画像認識方法を提供することを目的とする。
【解決手段】光源部8は波長の異なる照明光Lを選択的に切り換えて出射し、照明光学系9は光源部8から出射された照明光Lを認識マークM(薄膜部材)に導いてこれを照明する。制御部10は、光源部8から出射される照明光Lの波長を切り換えて異なる波長の照明光Lで認識マークMを照明しながらカメラ7eで認識マークMの撮像を行うとともに、認識マークMの撮像に用いている照明光Lの波長に応じた認識マークMのテンプレート画像を記憶部11から読み出し、撮像によって得られた認識マークMの画像と記憶部11から読み出したテンプレート画像とを比較してパターンマッチングを行う。
(もっと読む)
位置計測装置、位置計測方法およびプログラム
【課題】簡単な構成で対象物の位置計測を行うことができ、また、高精度に位置計測を行うことができる位置計測装置等を提供する。
【解決手段】対象物100に設けられた4点のLED11〜14を、撮像素子の飽和露光量以上になるように露光時間を設定し撮影するカメラ30と、LED11〜14の位置関係を記憶する記憶部と、記憶部に記憶されているLED11〜14の位置関係を読み出し、この位置関係およびカメラ30により撮影されたLED11〜14の像の位置関係から対象物100の位置を求める演算部と、を備えることを特徴とする位置計測装置300。
(もっと読む)
位置計測装置、位置計測システムおよびプログラム
【課題】簡単な構成で対象物の位置計測を行うことができ、また、高精度に位置計測を行うことができる位置計測装置等を提供する。
【解決手段】対象物100に備えられたバーコード10を撮影するカメラ30と、カメラ30により撮影されたバーコード10の画像から、4点以上の注目点を抽出し、メモリから注目点の位置情報を読み出し、メモリより読み出した注目点の位置情報および画像における注目点の位置関係からバーコード10の位置を求めることで対象物100の位置を求める演算装置40とを備える位置計測装置300。
(もっと読む)
露光装置及びデバイス製造方法
【課題】高精度なウエハテーブルの位置計測及び駆動制御を実現する。
【解決手段】
テーブルWTBが露光領域IAを含む第1領域内に位置する際には、エンコーダシステムを構成する光源16Xa,16Ya1から、テーブルWTBの一側面を介してその上面に設けられたグレーティングに計測光Lx1,Ly21を入射させ、これらの計測光に由来する回折光Lx2,Ly21を光検出器16Xb,16Yb1を用いて受光して、テーブルWTBの位置情報を計測する。テーブルWTBがアライメント系ALGの検出中心を含む第2領域内に位置する際には、光源16Ya2から計測光Ly22をグレーティングに入射させ、回折光Ly22を光検出器16Yb2を用いて受光して位置情報を計測する。それにより、両第1、第2領域において、高精度なテーブルの位置計測が、ひいては高精度なテーブルの駆動制御が可能となる。
(もっと読む)
位置検出システム、位置検出方法、プログラム、物体判断システム、および物体判断方法
【課題】位置検出システム、位置検出方法、プログラム、物体判断システム、および物体判断方法を提供すること。
【解決手段】電磁波発生装置と、前記電磁波発生装置から発せられる電磁波の投影面を撮像する撮像装置と、前記電磁波発生装置による電磁波の発生を制御する制御装置と、前記電磁波発生装置による電磁波の発生時に撮像された投影面の画像と電磁波の非発生時に撮像された投影面の画像との差分に基づいて前記電磁波発生装置および前記投影面の間に存在する物体の投影像を検出する投影像検出部、および、前記物体の投影像の位置に基づいて前記物体の位置を検出する位置検出部、を有する位置検出装置と、を位置検出システムに設ける。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】高精度且つ安定なウエハテーブルの位置計測及び駆動制御を実現する。
【解決手段】
エンコーダシステムを構成する光源16Xa,16Yaから、テーブルWTBの一側面を介してその上面に設けられたグレーティングに計測光Lx1,Ly2を入射させ、これらの計測光に由来する回折光Lx2,Ly2を光検出器16Xb,16Ybを用いて受光して、テーブルWTBの位置情報を計測する。テーブルWTBの周辺雰囲気の揺らぎの影響が小さいため、高精度なテーブルの位置計測が可能になる。さらに、エンコーダシステムの作動状態を診断し、また計測された位置情報の信頼性を検証し、それらの結果に応じて、エンコーダシステムから干渉計システムへ切り換え、干渉計システムを用いて計測される位置情報に基づいてテーブルWTBを駆動制御する。それにより、高精度且つ安定なテーブルの駆動制御が可能となる。
(もっと読む)
顔位置推定装置
【課題】対象者の顔位置推定の精度向上を図った顔位置推定装置を提供すること。
【解決手段】対象者Dに光を照射し、対象者Dのメガネ20上に投影された反射像22を取得して、取得された反射像22の位置及び大きさに基づいて、対象者Dの顔位置を推定する。従来の反射像の影響を無くすという考え方ではなく、むしろ反射像を効果的に利用して顔位置を推定するため、従前のようにメガネ20A,B上に投影された反射像22A,Bを除去するための処理が不要となり、処理負荷の増大を抑制して、顔位置推定精度の向上を図ることができる。
(もっと読む)
161 - 180 / 423
[ Back to top ]