
Fターム[2F065GG13]の内容
光学的手段による測長装置 (194,290) | 光源 (11,799) | 光源形態 (1,634) | 点の配列 (783)
Fターム[2F065GG13]の下位に属するFターム
Fターム[2F065GG13]に分類される特許
121 - 140 / 423
半導体ウェハの検査及び処理方法

【課題】マクロ検査ツールの適用性を広げ、高スループットで半導体ウェハからより詳細な検査情報を得る。
【解決手段】ウェハ検査方法は、ウェハ上に繰り返し配列されている個々の微細構造を解像するには不十分な結像解像度でウェハの全表面を結像させるステップを含む。本発明によれば、微細構造のフィーチャの特性は、微細構造を結像において直接解像することができないとしても、被選択検出信号群からの1若しくは複数の値の計算によって決定される。このようにして、記録される画像にマスク(109)が施され、画像の非マスク部分(111)は平均化によってさらに処理される。非マスク部分(111)は、ウェハのメモリ部分を含むように選択される。フィーチャ特性は、線幅、側壁の角度、微小寸法(CD)などを含むことができる。互いに異なる照明波長または偏光状態で撮影した複数の画像を組み合わせることもできる。
(もっと読む)
測定装置

【課題】測定に要する時間の増加を招くことなく、被測定物の測定対象に対する光学的な設定の異なる複数の測定データを得ることのできる測定装置を提供する。
【解決手段】撮像素子17からのライン反射光Rlの取得データに基づいて被測定物の表面形状を計測する測定装置10である。ライン反射光Rlを撮像素子17の受光面に結像させる複数の結像光学系(33、34)と、ライン反射光Rlを分岐して各結像光学系へと導く光束分岐機構32とを備え、各結像光学系は、被測定物の測定対象に対する光学的な設定が互いに異なるものとされ、撮像素子17は、受光面上において複数のセグメントが設定されているとともに各セグメントが複数の領域に区画され、各セグメントにおける少なくとも1つ以上の領域を受光領域とし、各結像光学系は、分岐されたライン反射光Rlを撮像素子17の受光面において互いに異なるセグメントの受光領域へと結像させる。
(もっと読む)
改良した被膜厚測定法
基材上の被膜の厚みを測定する方法を記載する。前記基材は、第2主表面と反対側の第1主表面を有し、前記被膜は前記第1主表面の一部分を覆っている。第1測定工程の間に、第1測定ビームを用いて第1基準点から前記基材の前記第1主表面の前記被膜で覆われていない一部分までの距離を測定し、第2測定ビームを用いて第2基準点から前記基材の前記第2主表面の被膜で覆われていない一部分までの距離を測定する。第2測定工程の間に、前記第1測定ビームを用いて前記第1基準点から前記被膜までの距離を測定し、前記第2測定ビームを用いて前記第2基準点から前記基材の前記第2主表面の被膜で覆われていない一部分までの距離を測定する。そのようにして測定した前記被膜の厚みは、自動車用グレージングペインにインクを塗布する方法における制御パラメータとして用いることもできる。  (もっと読む)
(もっと読む)
3D光学作像システム
【課題】簡単なハードウェア構成で高解像度の3Dキャプチャが可能な3Dカメラを提供する。
【解決手段】3D作像装置30は、一連のIR光のパルスを射出する光源装置42と、各々がIR光に感度のある感光セルのアレイを有するカメラ60と、被写体からの光を感光セルに、光の各光線が共通の焦点を通るように送るための撮像レンズと、光のパルスの射出と同期して、カメラ60によってキャプチャされた画像を交互に記憶する2個のメモリ64及び66と、2個のメモリ64及び66に記憶された2個の連続した画像と、光源装置42、カメラ60及び対象点102の位置とを利用して、被写体の深度マップを計算する信号処理装置と、を含む。光源装置42から射出される光のパルスは、交互に第1及び第2の強度を有する。
(もっと読む)
画像測定プローブと操作方法
測定対象物体の画像を取得し、これを供給するための画像測定プローブの操作方法。画像測定プローブは、座標位置決め装置の連続的角度調整可能ヘッドに取り付けられ、連続的角度調整可能ヘッドは少なくとも1つの回転軸を有する。物体と画像測定プローブは、測定動作中、その少なくとも1の回転軸の周囲で、および少なくとも1自由度の直線運動で相互に関して移動できる。この方法は、画像測定プローブによって取得された少なくとも1つの画像を処理してフィードバックデータを得るステップと、画像測定プローブと物体との間の物理的関係を、前記フィードバックデータに基づいて制御するステップと、を含む。  (もっと読む)
(もっと読む)
形状推定システム、撮影装置、形状推定方法、プログラム及び記録媒体
【課題】 光源からの光により生じる対象物の影から対象物の形状をより適切に推定可能な形状推定システム等を提供することを目的とする。
【解決手段】 形状推定システム1において、影撮影装置5は、例えば、撮影部19の周囲に複数の光源151,・・・,15Nを配置し、例えば1回ずつ点灯させるN回点灯制御を行い、各点灯制御に同期して撮影部19は撮影する。撮影データは撮影データ記憶部21に記憶され、画像データ修正部27によりノイズ除去等の修正処理が施され、特徴情報生成部29は、例えば多段階のウェーブレット多重解像度解析を行い、各成分の二乗平均平方根を取ることにより得られる対象物3の影の特徴を示す特徴情報を生成する。対象物3が既知の形状であれば、学習部31は例えば自己組織化マップを学習させる。対象物3が未知の形状であれば、推定部35は学習後の自己組織化マップに提示して既知の形状の一つを対象物3の形状として推定する。
(もっと読む)
大規模カメラネットワークの較正
本開示は、複数のノード(12)を含み、各ノードは、指向性を有するセンサ(18)と、通信モジュール(14)と、指向性を有するセンサ(18)から較正オブジェクト(20)のローカルな測定値を受信し、通信モジュール(14)を介して近傍ノード(12)から較正オブジェクト(20)の追加的な測定値を受信し、ローカルな及び追加的な測定値に応じて較正パラメータの初期集合を推定し、通信モジュール(14)を介して近傍ノード(12)から較正パラメータの追加的なセットを受信し、較正パラメータの追加的な集合に応じて較正パラメータの更新された集合を再帰的に推定するよう構成されたプロセッサ(16)とを有する、センサネットワーク(10)に関する。カメラノード(12)の大規模ネットワーク(10)を構成する更なるシステム及び方法が開示されている。 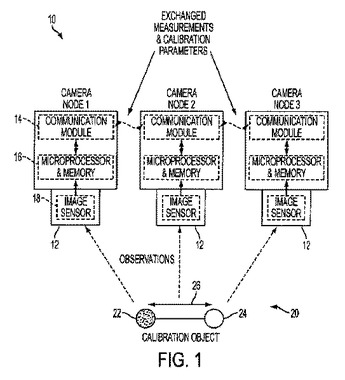 (もっと読む)
(もっと読む)
位置検出装置及び位置検出方法
【課題】屋内の移動体の位置検出に好適に適用でき、容易に導入可能な位置検出装置を提供する。
【解決手段】位置検出装置は、それぞれ異なる位置に配設されかつそれぞれ異なる光学特性を有する光を発光する屋内照明としての複数の発光部2a,2bと、前記発光部2a,2bから発光された光を受光して光強度信号を出力する受光部4を有する移動体と、前記複数の発光部2a,2bが配設されている位置と発光特性を対応づけた発光部情報5を格納する記憶部14,17と、前記受光部から出力された信号に含まれるそれぞれ異なる光学特性ごとの光強度信号と、前記記憶部14,17に格納されている発光部情報5に基づいて、前記移動体の位置を検出する位置検出演算部6とを備える。
(もっと読む)
車載用撮影ユニット
【課題】車内の乗員を漏れなくある程度の露出、鮮明さでカメラにより撮影できるようにすること。
【解決手段】車両の車内天井に取り付けられるケース13に赤外線カメラ15と複数の赤外線発光ダイオード(赤外線LED)17とを収容する。赤外線カメラ15は、車両1の前席7と後席9の乗員7a,9aを含む撮影範囲Aが収まる画角Bを有している。各赤外線LED17は、その光軸C1を、赤外線カメラ15の画角中心軸B1に対して垂直方向における上方に傾けている。赤外線LED17の光軸C1は、前席7の乗員7aの頭部の上方と後席9の乗員9aの頭部の下方とを通る。赤外線カメラ15の画角中心軸B1は、前席7の乗員7aの頭部と後席9の乗員9aの腰部とを通るので、画角中心軸B1に光軸C1の向きを合わせるよりも、赤外線LED17による照明光は、後席9の乗員9aに高い光量で照射される。
(もっと読む)
反射型光電センサ
【課題】遠距離範囲の検出分解能を落とさずに、不感帯の範囲を縮小することができる反射型光電センサを提供する。
【解決手段】投光レンズ1と、前方に光を射出する遠距離用投光素子2と、受光レンズ3と、前方から入射する光を受光する受光素子4と、前方に光を射出する近距離用投光素子7とをセンサボディ6内に備え、投光レンズ1の焦点に遠距離用投光素子2を配置し、受光レンズ3の焦点に受光素子4を配置し、投光レンズ1および遠距離用投光素子2の組みと受光レンズ3および受光素子4の組みとの間に、近距離用投光素子7が設けられる反射型光電センサにおいて、受光レンズ3の焦点距離が投光レンズ1の焦点距離よりも短く、受光レンズ3の前面が投光レンズ1の前面および近距離用投光素子7の前面より後方に配置され、カバー61aをカバー61bよりも後方に配置して、空間63cを形成する。
(もっと読む)
光学的車両レーザ検出システム
本発明は車両の動きを分析するレーザダイオードを用いたマルチビームレーザスポット画像処理システムに関連する。レーザダイオード(好ましくはVCSEL)を用いた画像処理システムは、車両の運動を分析するために使用される。1つ以上のレーザビームが路面に向けられている。CCDやCMOSカメラのような画像処理マトリクスセンサを含む小型画像処理システムは、個々のレーザスポットの位置又は距離を測定する。車両の積載状況、車両のピッチ及びロール角は、レーザスポットの位置や距離の変化を分析することで判明する。  (もっと読む)
(もっと読む)
歪み計測方法及び歪み計測装置
【課題】プラスチック、ゴム、金属および構造物、構造材などにおける被測定物の広範囲の歪み分布を非接触で容易に計測することができる歪み計測方法及び歪み計測装置を提供するものである。
【解決手段】被測定物5の計測箇所9にレーザ光4を照射するレーザ投光機1と、前記レーザ光4の反射光であるレーザスペックルパターン3を撮像する受光部2と、撮像したレーザスペックルパターン3の各スペックルの重心点12を求める画像処理手段と、各スペックルの重心点12の移動量と移動方向を検出して被測定物5の歪みを計測する計測手段とから構成してある。
(もっと読む)
検査方法
【課題】アルミニウム押出材を押出方向に対し垂直に切断して得られた被検査体の3次元的な形状精度を短時間で正確に検査する。
【解決手段】所定間隔を開けてそれぞれ対向配置した4組のレーザ変位計A1〜D1,A2〜D2の間に、被検査体を置き、被検査体の両切断端面の各隅部にレーザビームを照射し、各レーザ変位計A1〜D1,A2〜D2の検出信号に基づき、各測定ポイント毎に予め標準試料1に対して設定された基準位置からの変位を求める。レーザ変位計E1,E2,F1,F2から被検査体の側面及び底面にレーザビームを照射し、被検査体の標準試料1からの傾斜角度を求め、前記変位をこの傾斜角度によって補正し、実際の変位(実変位)を算出し、この実変位に基づいて被検査体の形状精度を検査する。3次元的な形状精度として、切断長さ、両切断端面の平行度、各切断端面の押出方向に対する直角度(Y方向直角度及びZ方向直角度)が検査される。
(もっと読む)
形状測定装置
【課題】光沢面を有する測定部位における三次元形状を簡易な機構により短時間で測定できること。
【解決手段】測定部位Pの周りの三次元に渡る複数の位置各々で光源12を点灯させて測定部位Pに対して順次異なる方向から光を照射し,測定部位Pからの正反射光の像をカメラ20により撮像し,計算機30により,光が照射されるごとの撮像画像における正反射光の像の位置と光の照射方向との対応関係を算出し,その位置に対応する測定部位P上の各測定点における外接平面の傾きを算出し,測定部位上の隣り合う点それぞれにおける外接平面の傾きに基づいて,測定部位Pの三次元形状値を算出する。
(もっと読む)
外観検査用照明装置および外観検査装置
【課題】三次元画像および二次元画像を用いた複数種類の外観検査に対応しつつ外観検査に要する手間やコストを低減する上で有利な外観検査用照明装置および外観検査装置を提供する。
【解決手段】外観検査用照明装置16は、透過性反射板32と、カバー34と、フレーム36と、第1の光源部38、第2の光源部40、第3の光源部42、第4の光源部44を含む。第1、第2、第3の光源部38、40、42から発せされた光は、透過性反射板32を透過して被検査物2を通る仮想平面に対して第1、第2、第3の角度θ1、θ2、θ3で交差して被検査物2を照射する。第4の光源部44から発せられた光は透過性反射板32の下面3206で拡散され反射されることで被検査物2を照射する。
(もっと読む)
視線追跡方法及び視線追跡システム
【課題】ユーザのスクリーンモジュール上の凝視位置の座標を正確に決定する非侵入式視線追跡システム等を提供する。
【解決手段】視線追跡方法は、ユーザがスクリーンモジュール上の凝視位置を凝視し、一組の光源がユーザの目に向かって光を発する間、画像取得モジュールによりユーザの目の画像を取得するステップと、ユーザの目の瞳孔と二つの反射光点の位置に基づいて、凝視位置に対応する角度及び面積を決定するステップと、前記角度及び前記面積に基づいて、前記凝視位置に対応する座標を決定するステップと、前記座標に関する操作を実行するステップを有する。前記視線追跡方法を実装する視線追跡システムも開示している。更に、前記視線追跡システムのための修正方法と修正モジュールも開示している。
(もっと読む)
物体形状測定装置
【課題】
高速に任意の形状を測定し得る物体形状測定装置を提供する。
【解決手段】
被測定体を囲む枠体1内面に一定間隔で発光素子2と受光素子3を配置し、発光素子2をひとつずつパルス発光する。そして光を検出した受光素子3をスキャンして被測定体に対する接線上にある発光素子と受光素子の組を選択し記憶する。
被測定体の全周に渉り以上の処理を繰り返した後に求めた発光素子と受光素子の組から接線の式を求め、接線の交点を演算して補間することにより被測定体の外形データを得ることが出来る。
(もっと読む)
位置・姿勢認識方法、部品把持方法、部品配置方法、部品組立方法、位置・姿勢認識装置、部品把持装置、部品配置装置、および部品組立装置
【課題】本発明は、位置・姿勢認識方法等に関し、1台のカメラで部品の位置および姿勢を高精度に認識する。
【解決手段】互いに離れた位置に置かれた3つの第1の光点と該3つの第1の光点それぞれを頂点とする三角形の参照面から垂直方向に離れた位置に置かれた1つの第2の光点とを含む光点群が配置された被計測体上の該光点群をカメラで撮影し、その撮影で得られた撮影画像上の、上記光点群を構成する各光点を表わす光像の位置および径に基づいて、被計測体の位置および姿勢を認識する。
(もっと読む)
管状品の内表面検査方法
【課題】管状品の内表面検査を行うに際に、カメラおよび光源の設置スペースを最小限に抑えつつ、有害な凹凸欠陥と無害な模様を確実に判別し、凹凸欠陥のみを検出することができる内表面検査方法を提供する。
【解決手段】管状品の中心軸に対して傾斜した光学中心軸を有し、管状品の開口端から管状品の内表面の所定領域を撮像するカメラと、カメラの光学中心軸および管状品の中心軸を含む面を挟んで対称に配置され、開口端から所定領域を照明する一対の光源と、を用い、光源からの照明を順に切り替えて同一の所定領域をカメラにより撮像し、それぞれの画像の同一画素間で濃淡の差分を演算し、その濃淡差分の情報に基づいて、凹凸欠陥5、6により出現した影5a、5b、6a、6bを認識し凹凸欠陥5、6を検出する。
(もっと読む)
位置計測システム、プログラム、標識セットおよび位置計測用の対象物
【課題】 対象物に取り付けられる位置計測のための標識セットがカメラと正対する場合でも、対象物の位置計測の精度を保つことができる位置計測システム、プログラム、標識セットおよび位置計測用の対象物を提供する。
【解決手段】 位置計測システムは、対象物1に取り付けられる位置関係の分かっている4つ以上の基本標識を有し、基本標識のうち少なくとも一つの基本標識が他の3つ以上の基本標識の位置する平面から離れて配置され、平面から離れて配置される基本標識から前記平面に下ろした垂線の平面との交点が他の3つ以上の基本標識により形成される多角形の外側に位置する標識セット2と、標識セット2を撮像する2次元撮像素子12を有するカメラ13と、カメラ13で撮像した標識セットの画像に基づいて対象物の3次元位置および角度の少なくとも一方を演算する演算装置14とを備える。
(もっと読む)
121 - 140 / 423
[ Back to top ]