
Fターム[2F065GG23]の内容
光学的手段による測長装置 (194,290) | 光源 (11,799) | 波長 (2,573) | 複数波長 (595)
Fターム[2F065GG23]に分類される特許
581 - 595 / 595
特にマイクロシステム技術における幾何構成の干渉と画像化の組合せに基づく検出のための装置および方法
本発明による装置は、少なくとも2つの異なる測定モードで動作することができる対物レンズを備える。第1の干渉モードにおいて、測定対象物は、干渉光学測定法によって測定される。第2の画像化測定モードにおいて、光学画像が、たとえばカメラのような検出器アレイで生成され、画像処理ルーチンを施されてもよい。2つの測定モード間の切換えは、対物レンズの照明の種類と、干渉計の参照ビーム経路に配置されることが好ましく、用いられる光のスペクトル組成に応じて参照ビーム経路を動作状態または非動作状態にする素子と、によって行われる。このようにして、2つの測定モード間の簡単かつ迅速な切換えは、対物レンズの交換を必要とすることなく、または対物レンズの移動も必要とすることなく行われる。切換えの迅速さに加えて、干渉分光法によって生じた測定データと画像処理によって生じた測定データとの間の良好な相関が達成される。干渉分光法および画像処理によって生じた測定データは、全く同一の基準座標系で得られる。 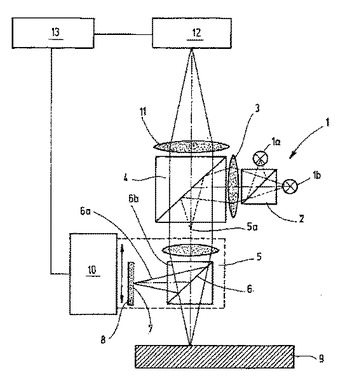 (もっと読む)
(もっと読む)
反射光源を使用する位置推定方法および装置
本発明は、反射される光源(204、205)を用いて、ローカルまたはグローバル座標系に対する物体(201)の位置および姿勢の推定に概ね関する。本方法および装置の一般的な応用には、自律型移動ロボットの位置の推定および追跡が含まれる。他の応用には、位置認識、ユビキタスデバイスのための物体の推定および追跡が含まれる。別の応用には、室内環境における人またはペットの位置の追跡が含まれる。本方法および装置は、面(206)から反射した、1つまたはそれ以上の放射された光源(201、205)の信号を検出することに少なくとも部分的に基づいて、複数の光センサの少なくとも1つの光センサの位置および姿勢を測定するように、1つまたはそれ以上の光エミッタ(203)と、1つまたはそれ以上の光センサ(202)と、信号処理回路構成要素と、信号処理方法とを含む。  (もっと読む)
(もっと読む)
基板の上に配置された膜の特性を測定する方法およびシステム
本発明は、基板の上に配置された膜の特性を測定する方法およびシステムを提供することを対象とする。該方法は、膜の上において複数の処理領域を識別することと、複数の処理領域のサブセットの特性を測定することと、測定された特性を確定することと、測定された特性の1つの変化を決定することと、測定された特性の1つと、サブセットの残りの処理領域に関連付けられる測定された特性との比較に基づいて、変化の原因を関連付けることとを含む。該システムは、上述された方法を実施する。 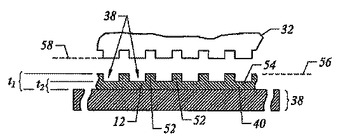 (もっと読む)
(もっと読む)
位置判定及びモーショントラッキング
プロセッサベースのシステム(301)において使用される位置判定及びモーショントラッキングのためのシステム及び方法。実施形態は、固定点(132)を中心として少なくとも1つの方向に動く方向転換器(130)と、サーチビーム(131)を位置ビーム(141)として反射する対象物(101)と、方向転換器の向きから少なくとも1つの角度位置を判定する論理回路(160)と、固定点(132)からの対象物の距離(104)を判定する論理回路(161)とを含む場合がある。  (もっと読む)
(もっと読む)
単一チップの赤、緑、青、距離(RGB−Z)センサー
RGB−Zセンサーは単一のICチップ上に実施可能である。ホットミラーなどのビームスプリッタが、対象物から入射する第一及び第二のスペクトルバンド光エネルギーを受信し、好ましくはRGBであるイメージ成分及び好ましくはNIRZである成分に分離する。RGBイメージとZ成分は、それぞれイメージデータとZデータを出力するRGBピクセル検出器及びNIRピクセル検出器のアレイ領域によってそれぞれ検出される。これらの領域のピクセルサイズ及びアレイ解像度は同一である必要はなく、またこれら両方のアレイ領域を共通のICチップ上に形成しても良い。対象物の認識を容易にするために、イメージデータを用いたディスプレイはZデータによって補助できる。その結果得られる構成は、ビームスプリットを行なうことによる光学的効率性と単一のICチップに実施することによる簡素性とを組み合わせたものとなる。この単一チップの赤、緑、青、距離(RGB−Z)センサーの使用方法も開示されている。  (もっと読む)
(もっと読む)
ヘテロダインインターフェロメータの制御方法及び制御装置
本発明は、別個の光路内に設けられた2つの音響光学変調器、アナログ信号を形成する受光器、及び、該受光器の後ろ側に接続された、アナログ信号をデジタル信号に変換するA/D変換器を有しており、一方の変調周波数f1の一方の音響光学変調器と、他方の変調周波数f2の他方の音響光学変調器が制御され、一方の変調周波数f1及び他方の変調周波数f2の差は、ヘテロダイン周波数fHetを形成し、A/D変換器で、アナログ信号からデジタル信号にサンプリング周波数faで変換されるヘテロダインインターフェロメータの制御方法に関する。
そのようなヘテロダインインターフェロメータで、変調周波数f1,f2及びサンプリング周波数faからなる各周波数の少なくとも2つを、共通の発振器の基本周波数fQuarzから形成することによって、各変調周波数の固定比が保持され、この各変調周波数の固定比が、経年変化及びドリフトによって相互にシフトしないようにすることができる。
更に、こうすることによって、サンプリング周波数faが、ヘテロダイン周波数fHetの各変調周波数f1,f2の差周波数に対して固定の位相比となるようにされる。サンプリングは、一定位相でドリフト及び経年変化とは無関係に行われるので、測定精度が高められる。  (もっと読む)
(もっと読む)
差動限界寸法およびオーバーレイ測定装置および測定方法
【課題】 イン・ラインの測定および制御ツール、テスト・パターンおよび評価方法を含む統合された測定システムを提供する。
【解決手段】 基板上で寸法を測定するための方法を記載する。ターゲット・パターンは、主周期ピッチPで反復する公称特徴寸法を備え、主方向に直交する所定の変動を有する。基板上に形成されたターゲット・パターンは、少なくとも1つの非ゼロ次回折が検出されるように照射する。公称寸法に対する転写された特徴寸法の変動に対する非ゼロ次回折の応答を用いて、基板上で限界寸法またはオーバーレイ等の対象の寸法を求める。本発明の方法を実行するための装置は、照射源と、非ゼロ次回折を検出するための検出器と、ターゲットからの1つ以上の非ゼロ次回折を検出器において検出するようにターゲットに対して照射源を位置付けるための手段と、を含む。
(もっと読む)
パターンのムラ欠陥検査方法及び装置
被検査体の表面に形成されたパターンに発生する複数種類のムラ欠陥
を高精度に検出できること。
単位パターン53が規則的に配列されてなる繰り返しパターン51を表面に備えたフォトマスク50に光を照射する光源12と、上記フォトマスクからの散乱光を受光して受光データに変換する受光部13とを有し、この受光データを観察して上記繰り返しパターンに発生したムラ欠陥を検出するムラ欠陥検査装置10において、複数の波長帯の光から所望の波長帯の光を一または複数選択して抽出する波長フィルタ14を有し、この選択して抽出された波長帯の光を用いて上記繰り返しパターンのムラ欠陥を検出することを特徴とするものである。
(もっと読む)
表面の干渉分析のための方法およびシステムならびに関連する応用例
物体の空間的特性を決定するための方法には、2つ以上の界面を含む測定物体からの走査低コヒーレンス干渉信号を得ることが含まれる。走査低コヒーレンス干渉信号には、2つ以上の重なり合う低コヒーレンス干渉信号(それぞれ個々の界面に起因する)が含まれる。低コヒーレンス干渉信号に基づいて、少なくとも1つの界面の空間的特性が決定される。場合によって、決定は、低コヒーレンス干渉信号のサブセットに基づき、信号の全体に基づくのではない。あるいはまたは加えて、決定は、低コヒーレンス干渉信号を得るために用いられる干渉計の機器応答を示す場合があるテンプレートに基づくことができる。 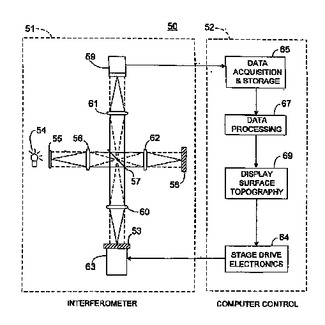 (もっと読む)
(もっと読む)
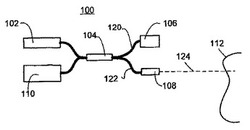
放射の散乱/反射要素の位置測定のシステム及び方法
放射散乱/反射要素の位置を判定するための方法及びシステムであって、放射透過性要素面で放射入射する面に放射エミッタが設けられる。この入射放射は散乱/反射要素により散乱/拡散/反射され、透過性要素により、この要素位置を判定できる検出器に向けてガイドされる。  (もっと読む)
(もっと読む)
非平面的試料を調査するための方法及び装置
試料特に(製薬)錠剤を調査するための方法及び装置である。放射体及び/又は試料は、最初は、放射体が所定の距離にあり、試料表面の最初に照射した点の法線方向に位置する。放射体は25GHz〜100THzの範囲で複数の周波数を持つ光を試料の複数の点に照射する。放射体と試料とは相対的に位置を変えることが可能である。ただし、その位置の変更は、放射体と試料との間では所定の距離(試料表面と放射体との)を保存し、放射体は各照射点の法線と一致させ、透過又は反射した光を各点で検出することが可能になるようにする。この特徴的な応用として(製薬)錠剤のコーティングの形状及び組成を画像化するというのがある。 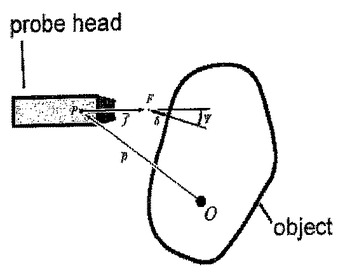 (もっと読む)
(もっと読む)
平面ミラー干渉計測定システムにおけるビーム・ミスアライメントの幾何学的な影響に対する補償
一態様において、本発明は方法に特徴があり、その方法は、干渉分光法システムにおける干渉計を用いて、第1ビーム経路と第2ビーム経路との間の光路差に関係づけられる位相を含む出力ビームを生成することであって、第1ビームは第1の箇所における測定物体に接触し、第1ビームまたは第2ビームは第2の箇所における測定物体に接触し、第1の箇所および第2の箇所は異なる、出力ビームを生成すること、第1の箇所における測定物体の不完全性に起因し、かつ第2の箇所における測定物体の不完全性に起因するずれであって、第1ビーム経路または第2ビーム経路の公称ビーム経路からのずれによって生じる光路差への影響に対処する事前校正済み情報を提供すること、出力ビームから得られる情報および事前校正済み情報に基づいて、少なくとも1つの自由度について測定物体の位置を決定すること、を含む。  (もっと読む)
(もっと読む)
パターン化ウェハまたは非パターン化ウェハおよびその他の検体の検査システム
パターン化と非パターン化ウェハの検査システムを提供する。1つのシステムは、検体を照明するように構成された照明システムを含む。システムは、検体から散乱された光を集光するように構成された集光器をも含む。加えて、システムは、光の異なる部分に関する方位と極角情報が保存されるように、光の異なる部分を個別に検出するように構成されたセグメント化された検出器を含む。検出器は、光の異なる部分を表す信号を生成するように構成されていてもよい。システムは、信号から検体上の欠陥を検出するように構成されたプロセッサを含むこともできる。他の実施形態におけるシステムは、検体を回転・並進させるように構成されたステージを含むことができる。1つの当該実施形態におけるシステムは、検体の回転および並進時に、広い走査パスで検体を走査するように構成された照明システムを含むこともできる。 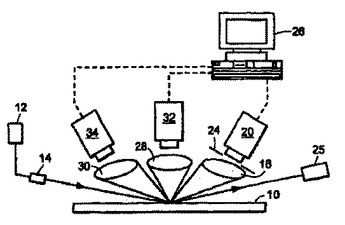 (もっと読む)
(もっと読む)
光断層映像法による画像化
【解決手段】 対象物のデジタル画像は、隠され、遮られ、又は視認できない対象物の部分の表示を含んでいる。画像は、歯群の多次元の視覚的表示である。歯群とその表面、輪郭及び形状の特性が判定及び/又は分析される。光は、歯群に向けて送られ、そこから反射される。反射光は基準光と組み合わせられ、歯肉下組織のような隠された領域を含む歯群の特性が判定される。 (もっと読む)
立体カメラセットを有する走査システム
走査システムは、対象物(40)の定性的及び定量的不規則性を検出する1以上の立体カメラ(10)を有する。各立体カメラセット(10)は、2つのカメラ(12,14)と投影器(16)とを有する、各カメラ(12,14)は、CCDマトリックス配列(18)の配列不良による歪みと光学システムの欠損とを補正するために較正される。投影器(16)は、測定されるべき対象物(40)に絶対符号パターン(32,34,36)を投影し、赤外、可視、紫外スペクトルの電磁気エネルギーを放射可能である。複数のカメラセット(10)は、3次元空間(26)の対象物(40)の不規則性を検出可能な走査システムマトリックス(42,44)と結合され得る。3次元空間(26)は、立体カメラセット(10)の数に応じて、任意の所望の寸法であり得る。カメラ(12,14)からのデータは、測定の表示用にデジタル信号プロセッサ(66)を介してコンピュータインターフェース(64)に送信される前に、ゲートアレイ(62)により予備処理される。結果的に、送信されるデータ量は、簡素化され、従って動作時間を減少させ、走査システムが非常に短い時間で対象物(40)の不規則性を非常に正確に測定することを可能にする。 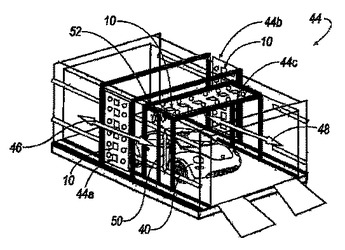 (もっと読む)
(もっと読む)
581 - 595 / 595
[ Back to top ]