
Fターム[2F065LL13]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 完全反射体 (2,799) | 平面鏡(プリズム含む) (1,867) | 回転又は振動 (344)
Fターム[2F065LL13]に分類される特許
1 - 20 / 344
レーザトラッカー
3次元形状測定装置
【課題】3次元形状の測定精度をより改善できる3次元形状測定装置を提供すること。
【解決手段】本発明の3次元測定装置は、測定対象物を固定するワークステージと、光源、光源から照射された光を透過させる格子及び格子の格子イメージを測定対象物に結像させる投影レンズを含み、測定対象物に対して格子イメージを第1方向にN回入射した後、測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、測定対象物によって反射される第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、イメージ取り込み装置に受信された第1方向反射イメージ及び第2方向反射イメージを用いて測定対象物の影領域を補償して測定対象物の3次元状態を算出する制御部と、を含む。
(もっと読む)
位置検出装置、位置検出方法、露光装置、露光方法およびデバイス製造方法

【課題】反射面を通過した光束に発生する偏光成分による相対的な位置ずれなどの影響を実質的に受けることなく、被検面の面位置を高精度に検出することのできる面位置検出装置。
【解決手段】投射系は、第1反射面7b,7cを有する投射側プリズム部材7を備えている。受光系は、投射側プリズム部材に対応するように配置された第2反射面8b,8cを有する受光側プリズム部材8を備えている。第1反射面および第2反射面を通過した光束の偏光成分による相対的な位置ずれを補償するための位置ずれ補償部材をさらに備えている。
(もっと読む)
ロボットシステム
【課題】スリット光の予測投影領域を最適化することによってロボットによるワークの取出作業の速度および精度を向上させることができるロボットシステムを提供すること。
【解決手段】実施形態の一態様に係るロボットシステムは、投影部と撮像部と予測投影領域決定部と投影位置検出部とロボットとを備える。投影部は、ワークが載置される載置領域へスリット光を投影して所定の移動方向へ移動させる。撮像部は、ワーク上を移動するスリット光を順次複数回撮像する。予測投影領域決定部は、撮像された画像を移動方向と交差する交差方向へ横断し、画像における交差方向の中央に近いほど移動方向と平行な方向の長さが長くなるように、画像におけるスリット光の予測投影領域を決定する。投影位置検出部は、予測投影領域の中からスリット光の投影位置を検出する。ロボットは、検出された投影位置に基づいてワークを把持する。
(もっと読む)
光学式位置検出装置、位置検出システムおよび入力機能付き表示システム
【課題】検出光の進行方向および検出光の進行方向に交差する方向の双方における検出範囲を拡張することのできる光学式位置検出装置、位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】位置検出システム1において、光源部12は、検出光L2を放射状に出射するとともに、検出光L2の放射角度範囲において一方側から他方側に向かって強度が変化する光強度分布を形成し、受光部13は、光強度分布が形成された検出対象空間10Rに位置する対象物体Obで反射した検出光L2を受光する。光源はレーザー光源14であり、レーザー光源14から出射されたレーザー光(検出光L2)を可動ミラー11によって走査する。
(もっと読む)
検査装置、検査方法及び半導体装置の製造方法
【課題】検査対象からの反射光角度の変化に基づいて基板の欠陥を精度よく検査することができる検査装置を提供すること。
【解決手段】本発明に係る検査装置は、赤外光を出射する光源11と、光源11から出射される赤外光を平行光としてウエハ30に略垂直に入射させ、当該ウエハ30からの反射光を導く光学系と、光学系により導かれる反射光のうち、正反射光以外の光を検出するIRカメラ19、20とを備え、光源11からの赤外光を導光する光ファイバ13の出射端面面は、光学系の瞳位置に配置されている。
(もっと読む)
走査型検出測定装置、及び測定方法
【課題】簡素な構成を採用しつつ検出光量ムラの発生を抑制可能とした走査型検出測定装置を提供する。
【解決手段】本発明の走査型検出測定装置は、レーザ光を射出する発光素子と、発光素子から供給されるレーザ光を走査しつつ標本に照射する走査光学系と、標本から生じる光を検出する検出光学系と、発光素子と走査光学系との間に設けられレーザ光の一部を発光素子に向けて反射させる反射光学素子と、を有することを特徴とする。
(もっと読む)
形状測定装置、及び形状測定方法
【課題】試料を詳細かつ適切に評価することができる形状測定装置、及び形状測定方法を提供する。
【解決手段】本発明の一態様にかかる形状測定装置は、観察窓51と、基板54とを有する試料保持ユニット11と、観察窓51又は基板54を介して、試料53を加圧するシリンダ56、57と、試料51の形状を測定するため試料51を照明するとともに、照明光の焦点位置を光軸方向に走査可能な共焦点光学系30と、共焦点光学系30を介して、試料保持ユニット11に保持された試料からの反射光を検出するラインセンサ15〜17と、焦点位置を光軸方向に走査した時での検出結果によって、形状を測定する処理部18と、を備え、観察窓51の表面51aに焦点位置を合わせて、観察窓51の表面形状を測定するものである。
(もっと読む)
ステレオカメラ較正装置およびステレオカメラ較正方法
【課題】マーカを設置するための較正用ポールの本数を少なくする。
【解決手段】回転可能であり、回転角の調整によって電子カメラによる第1、第2マーカの撮影を可能とする可動ミラーと、可動ミラーの回転角を取得する回転角取得装置12と、電子カメラの撮像面に対する第1、第2マーカの投影点の位置を検出する投影点検出装置13と、電子カメラのカメラ要素の相対的な位置関係、可動ミラーの回転中心軸の位置および第1、第2マーカの位置を記憶する記憶部15と、カメラ要素の相対的な位置関係、回転中心軸の位置、第1、第2マーカの位置、可動ミラーの回転角および第1、第2マーカの投影点の位置から電子カメラの位置および向きを算出するカメラ位置算出部18とを設ける。
(もっと読む)
基板処理装置に用いられるプロセスモニター装置、プロセスモニター方法、および基板処理装置
【課題】光学的手法を用いて被処理基板の構造をより高精度に評価することができるプロセスモニター装置を提供する。
【解決手段】プロセスモニター装置11は、光を出射する光源部と、光の強度を検知可能な光検知部と、光源部から出射された光をウェハWまで導き、ウェハWから反射した反射波を光検知部まで導く第一光経路21と、第一光経路21と同等の光伝搬特性を有するように構成され、光源部から出射された光を、ウェハWを経由することなく光検知部まで導く第二光経路と、第二光経路を通して光検知部により検知された光の強度情報に基づいて、第一光経路21を通して光検知部により検知された光の強度情報を補正し、ウェハWの構造を解析するコントローラ17とを備える。
(もっと読む)
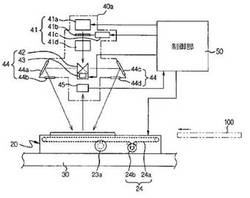
変位・ひずみ分布計測光学系と計測手法
【課題】安価で小型の変位・ひずみ分布計測光学系と計測手段を提供すること。
【解決手段】複数の撮像素子を使用することで、光学素子の数を減らし、2次元の変位・ひずみ分布計測を行うことができる装置を小型にすることができる。さらに、計測対象物の近傍に鏡を設置することにより、撮像素子の数を減らし、さらに小型の装置とすることができる。
(もっと読む)
Hilbert位相画像処理のためのシステムと方法
【課題】細胞内で起こる高速現象を測定する装置を提供する。
【解決手段】ヒルベルト位相顕微鏡を使用し、透光性物体に関連した高解像度位相情報から、一フレーム毎の形状、体積のようなパラメータを得、ミリ秒の時間スケールで取得した多数の画像をもとに、ダイナミックな変動をナノメートルオーダーの分解能で定量化する。
(もっと読む)
カム表面の観察方法
【課題】カム表面を観察することのできる、広視野レーザ顕微鏡を用いた新規のカム表面の観察方法を提供する。
【解決手段】テレセントリックfθレンズ8の焦点面近傍に近接配置したカム表面10からの反射光をテレセントリックfθレンズ8により平行光束に変換し、走査ミラー7で反射させた後に、結像レンズ11によって集光してテレセントリックfθレンズ8の焦点面と共役の位置に設置したピンホール12aを通過させ、ピンホール12aを通過した反射光の光量を受光素子13で計測する。カム表面10を有するカムシャフト9をその軸zを中心に回転させるとともに、レーザ光に対してカム表面10が常に垂直になり、かつ、レーザ光の焦点が常にカム表面10に位置するように、カムシャフト9を移動させながら観察する。
(もっと読む)
サンプル媒体上のレチクルマークを用いて、希少細胞のスキャナ画像座標を顕微鏡座標に変換する方法
【課題】物体の位置を取得する方法を提供する。
【解決手段】画像形成システムの第1座標空間が定められ、該第1座標空間における座標が指定される。第2の画像形成システムの第2座標空間が定められ、該第2座標空間における座標が指定される。第1座標空間の指定された座標を用いることにより、座標変換パラメータが計算される。その後、第1座標空間において少なくとも1つの物体の座標が指定され、該物体の第1座標空間座標が第2座標空間における独自の座標に変換される。
(もっと読む)
測定補助器具およびそれを用いた直径測定方法
【課題】 円形材料等の測定対象物に対し、レーザトラッカーから見て反対側の面の空間座標を測定すること、並びに外周面における任意の高さ位置の空間座標を測定することを可能にする測定補助器具を提供する。
【解決手段】 測定補助器具20は、ターゲットTgを設置するターゲット設置部材21と、その下側に位置固定で設けられ測定対象物Wの上端面に接触させる上端面接触部材22と、その下方に配置され測定対象物Wの周面に接触させる周面接触部材23と、上面接触部材22に対する周面接触部材の高さを調整する高さ調整機構24とを備える。レーザトラッカー1により、測定対象物Wに設けられたターゲットTgにレーザ光Lbを照射し、その反射光からターゲットTgの空間座標を求める。求められた空間座標から、測定対象物Wの外周面における周面接触部材23との接触箇所の空間座標を得る。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
光学的計測装置
【課題】位相シフト法による干渉縞を用いた高さ計測装置において、位相シフト画像に内包する各種ノイズ成分の影響を抑制し高精度な光学的計測装置を提供する。
【解決手段】測定対象物の測定面の高さと上記測定面の高さに応じた複数の異なる波長の光による干渉縞画像内の各点の明るさが変化する部分の位相との関係を所定の演算式に数式化するとともに、上記測定対象物の測定面の高さと測定面の高さに応じた上記複数の異なる波長の光による干渉縞画像内の各点の明るさが変化する部分の位相との組合せを、同数式化した所定の演算式に基いて演算し、この演算により求めた位相情報を位相コード変換テーブルに反映させることによって、上記測定対象物の測定面の高さを計測する。
(もっと読む)
三次元計測装置
【課題】計測精度に優れた三次元計測装置を提供すること。
【解決手段】対象物の三次元形状を計測する三次元計測装置であって、対象物へ向けて計測光を射出する光射出部と、計測光を発光する光源を有し、計測光を光射出部に供給する光供給部と、光源と光射出部とを相対移動させる移動部と、計測光が照射された対象物を撮像する撮像部と、撮像部による撮像結果及び移動部による移動結果に基づいて、対象物の三次元形状を求める演算部とを備える。
(もっと読む)
三次元データ処理装置、方法及びプログラム
【課題】三次元画像表示された対象物の視認性が向上する三次元データ処理技術を提供する。
【解決手段】三次元データ処理装置20は、対象物の表面に走査されたレーザの反射光を受光しその反射点の位置データの集合である点群データを生成する点群生成部21と、前記点群データ31の位置データにおけるピクセルの法線を導出する法線導出部22と、法線43に基づいてピクセルの輝度を演算する輝度演算部23と、ピクセルの前記位置データ及び前記輝度に基づいて対象物30の三次元画像を構成する3D画像構成部26と、を備える。
(もっと読む)
3次元形状測定装置
【課題】受光センサにて受光した反射光のスポットが欠けた場合であっても、精度良く測定対象物の3次元形状を測定できる3次元形状測定装置及び3次元形状測定方法を提供する。
【解決手段】受光信号の強度の閾値としてレベルL1を設ける。受光信号の強度が最も大きい受光素子の位置を基準位置P1(n)とする。基準位置P1(n)の両側から、受光信号の強度がレベルL1である受光素子又はレベルL1に最も近い受光素子の位置を1つずつ取得する。前記取得した2つの受光位置の中点と基準位置P1(n)とのずれ量D1が許容値以下であれば、基準位置P1(n)を反射光の結像位置P(n)と決定し、結像位置P(n)を用いて、その測定ポイントの3次元座標を算出する。ずれ量D1が許容値より大きければ、その測定ポイントの3次元座標を算出しない。
(もっと読む)
1 - 20 / 344
[ Back to top ]