
Fターム[2F065LL50]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 指標 (64)
Fターム[2F065LL50]に分類される特許
1 - 20 / 64
アライメント方法およびパターン形成方法
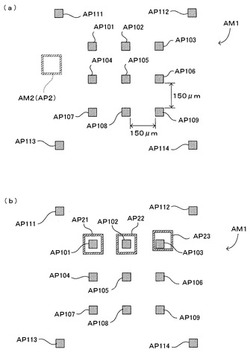
【課題】2つの基板のそれぞれに形成されたアライメントマークの両方に同時にピントを合わせることができない場合であっても、それらの位置合わせを高精度に行うことを可能にする。
【解決手段】パターンを転写される基板に形成されるアライメントマークAM1は、正方形の中実図形であるアライメントパターンAP101〜AP109、AP111〜AP114を配列してなるものとする。一方、基板に転写すべきパターンを担持するブランケットには、アライメントマークAM2として、環状の中空矩形のアライメントパターンAP2をパターンと同じ材料で形成する。アライメントマークAM1は、低い空間周波数成分をアライメントパターンAP2よりも多く含むパターンにより構成されており、ピントが合わない状態で撮像された場合でも重心位置を精度よく検出することが可能である。
(もっと読む)
情報端末装置

【課題】簡素且つ高精度に撮像対象の大きさを推定して、その大きさに応じて表示情報の制御を行うことのできる情報端末装置を提供する。
【解決手段】撮像部2と、撮像対象の大きさを推定する推定部3と、情報を表示する表示部6と、表示部6で表示する情報を記憶する記憶部5と、推定された大きさに関連する情報を記憶部5から読み出して制御する制御部4とを備え、推定部3が、撮像対象の一面上に設けられた大きさ及び形状が既知のタグを検出するタグ検出部と、タグの周囲に形成される撮像対象の領域を抽出する領域抽出部と、検出タグの配置とタグの所定配置との比較に基づいて、検出タグの撮像部2に対する姿勢を推定する姿勢推定部と、推定姿勢に基づいて抽出された撮像対象の一面の大きさと、その一面を除外した奥行き部分の大きさとを推定するサイズ推定部とを含むよう情報端末装置1を提供する。
(もっと読む)
コークス炉移動機の位置調整方法及び装置
【課題】コークガイド車などの移動体の移動路に沿って設けられた目標体とコークス炉の位置関係に誤差が生じても移動機を簡易に目標とする位置にする。
【解決手段】コークガイド車1の移動路に沿って設けられた目標体9を検出し、目標体検出装置4で目標体9を検出したときのコークガイド車1の規定位置に対し、目標位置検出装置5で目標位置を検出しながら規定位置から目標位置までコークガイド車1を移動し、検出された目標位置と規定位置との位置誤差を記憶し、以降、目標体9を検出した位置から記憶された位置誤差分だけ移動してコークガイド車1を目標位置にすることにより、目標体9とコークス炉7の位置関係に誤差が生じても、一度、目標体9を検出したときの規定位置と目標位置との位置誤差を記憶してしまえば、以降はコークガイド車1を簡易に目標とする位置にすることができる。
(もっと読む)
情報処理装置、情報処理方法
【課題】撮像装置や現実物体に装着された姿勢センサの校正を、簡便かつ正確に行う為の技術を提供する。
【解決手段】姿勢計測値取得部145は、撮像装置120に装着された姿勢センサ110による姿勢計測値、現実物体125に装着されたセンサ115による姿勢計測値を取得する。画像処理部135は、現実物体125上に配置された指標の撮像画像上における画像座標を取得する。校正部160は、撮像装置120に対するセンサ110の配置情報、現実物体125に対するセンサ115の配置情報、のうち少なくとも1つを、上記2つの姿勢計測値、画像座標を用いて求める。
(もっと読む)
回転角度計測装置及び方法
【課題】計測対象の回転体の回転角度を、計測センサが非接触で、計算コストを抑え且つ高精度で計測する。
【解決手段】回転体1の回転角度と一意的に対応するマーカ模様の境界線を有する螺旋状マーカ2を回転体1に設置し、ラインセンサ4で螺旋状マーカ2を撮影し、解析装置5によって、予め求めておいたマーカ模様の境界線位置から回転体1の回転角度を計算する式を基に、ラインセンサ4で撮影した画像から回転体1の回転角度を計測する。
(もっと読む)
施工補助装置、施工補助方法
【課題】建築物の施工、解体、デザインの製作など、幅広い意味での施工を必要とする施工領域における面積を簡便に算出すると共に、必要となる作業量、作業時間、コスト、材料、素材、材料や素材の量、必要となる機器の種類や大きさなどを推測できる、施工補助装置を提供する。
【解決手段】施工補助装置は、施工対象物100の画像に基づいて、施工対象物100の所定領域の面積を算出する面積算出手段と、施工対象物100の周辺情報を記憶する第1記憶部と、施工対象物100の施工に必要となる要素である施工要素を記憶する第2記憶部と、所定領域の面積、周辺情報および施工要素の少なくとも2以上に基づいて、施工対象物100の施工特性を算出する算出手段と、を備える。
(もっと読む)
変位検出警報システム
【課題】風や反射光などの外乱の影響による誤検出を低減させ正確な変位量を検出することができる、安価で高精度な変位検出警報システムを提供すること。
【解決手段】再帰反射材を用いた1枚のターゲットに対して、異なる方向から複数の変位検出装置によって撮影することで、昼夜問わず外乱による誤検出を低減させることができる。さらに、変位検出装置で撮影した画像データと過去の計測データと気象データを統合することにより、気温の変化によるターゲットもしくは変位検出装置の変形や、両方の変形、降雨や風による変位の誤検出が発生しやすい場合でも、高確率で正しい判定が可能になる。また、各変位検出装置でデータを分散して保存することにより、変位検出装置が最後の1台になっても、計測を継続することが可能である。
(もっと読む)
振動計測装置および振動計測方法
【課題】振動の測定および解析を容易に行うことができるようにする。
【解決手段】高速度カメラ4の撮像部4aは、ケーブル10の各実測点に設けられたマーカーシール5が正反射する光を撮像する。高速度カメラ4の計算処理部4bは、撮像部4aによる撮像と並行して、撮像部4aが撮像した画像毎に各実測点の座標を求める。高速度カメラ4のメモリ4cは、各実測点の座標に係るデータを記憶する。コンピュータ6は、メモリ4cに記憶された各実測点の座標に係るデータを用いてケーブル10の振動分析を行う。
(もっと読む)
変位測定装置及び光無線通信システム
【課題】光無線通信システムのトラッキング機構の小型化、測定精度向上等を実現する。
【解決手段】送信ユニット11に2つの距離センサ14,15を設け、受信ユニット21に位置指標部23と基準高さ部24を設ける。位置指標部23は、複数のエリアに区画され且つ各エリア毎に高さが異なる三次元形状に形成され、基準高さ部24を基準とした各エリアの高さとエリア位置との関係を変位測定テーブルデータとして記憶する。各距離センサ14,15によって位置指標部23の1つのエリアまでの距離と基準高さ部24までの距離をそれぞれ測定し、これら2つの距離測定値の差分と変位測定テーブルデータとに基づいて位置指標部23のうちの第1の距離センサ14で測定したエリア位置を特定することで、受信ユニット21の変位量及び変位方向を判定し、その判定結果に基づいて送信部12と受信部22との光軸ずれを補正するように光軸ずれ補正機能を作動させる。
(もっと読む)
入力装置、入力制御方法及びプログラム
【課題】 低消費電力でコストを掛けずに直感的な遠隔操作を行えるようにすることにある。
【解決手段】 入力装置(10)は、離隔位置にある所定立体形状のマーカ体(18、33、42)を画像認識する画像認識手段(8)と、前記画像認識手段の認識結果に基づいて前記マーカ体の姿勢を判定する姿勢判定手段(13)と、前記姿勢判定手段の判定結果に対応したイベントを発生するイベント発生手段(15)とを備える。マーカ体(18、33、42)の画像を認識し、その画像に基づいてマーカ体の姿勢を判定して遠隔操作用のイベントを発生する。リモコンに適用する場合は、リモコン本体にマーカ体を取り付ければよい。
(もっと読む)
面積計測装置および面積計測方法
【課題】 基準面に載った流動体が占める面積を測定する技術を提供する。
【解決手段】 流動体(20)が広がった所定の基準面(10)および前記流動体(20)の境目に対してポイント照射光を照射する照射ポインタ(70)と、 その照射ポインタ(70)によって照射される前記基準面(10)および前記流動体(20)の境目を連続撮影する連続撮影用カメラ(48)と、 その連続撮影用カメラ(48)の撮影領域に入るように固定された面積算出の基準となる面積基準体(80)と、 前記の連続撮影用カメラ(48)にて連続撮影された画像データにおける前記の面積基準体(80)および前記のポイント照射光がなぞった軌跡にて囲われた流動体(20)の面積を算出する面積算出手段と、を備える。 前記の照射ポインタ(70)が照射するポイント照射光は、前記の流動体(20)および前記の基準面(10)と明確に区別可能な色彩とする。
(もっと読む)
自己発光型ターゲット及び変位計測システム
【課題】 屋外において昼夜に亘って連続的に変位計測が可能で計測誤差が少ない変位計測用の自己発光型ターゲット、及びそれを備えた変位計測システムを提供すること。
【解決手段】 撮像手段(カメラ3)で撮像した画像を解析手段(PC4)で解析することにより計測対象物(レール)の変位計測を行う変位計測システム1に用いられ、計測対象物(レール)に取り付けられて自ら発光する変位計測用の自己発光型ターゲット(計測用ターゲット2)を、ケース20と、このケース20の背面側内部に取り付けられて発光する発光手段21と、ケース20の前面側内部に取り付けられ、蓄光性蛍光体と光透過性物質とを含有して板状に成型された蓄光面材22と、を備えた内照式の自己発光型ターゲットとする。
(もっと読む)
三次元計測治具及びこれを用いた三次元計測方法
【課題】棒状ワークの曲がり角度を簡単に計測することができるのに加えて、棒状ワークの計測部位毎の曲がり角度を記録に残すことが可能になる三次元計測治具及びこれを用いた三次元計測方法を提供する。
【解決手段】筒体や柱体等の棒状ワークの曲がり角度を計測するのに用いられる三次元計測治具であって、互いに合体してパイプWの外周に嵌合装着される一対の半円形治具構成体2,2を備え、一対の半円形治具構成体2,2には、レーザ光Lrの送受信を行うことで中心Rpの三次元座標が求められる球状のリフレクタRをスライド可能に保持する外向き溝2bが形成され、リフレクタRを保持する外向き溝2bは、パイプWの治具構成体2,2が装着される部位における断面を算出するのに必要な複数の位置を結んでパイプWの外周に沿ってそれぞれ形成されている。
(もっと読む)
情報処理方法および装置
【課題】 撮影装置から入力される画像列から指標やセンサの配置情報計測のために必要な画像を自動判定して取得できるようにする。
【解決手段】 複数の視点を移動する撮像装置を用いて、複数の視点ごとに現実空間を撮像した複数の画像を取得し、撮像装置が移動する複数の視点間の移動量を示す評価値を算出し、評価値が予め定められた閾値を超える場合に、移動量が示す移動後の視点で撮像された画像を、補正に用いる画像として決定し、複数の画像のうちの何れを、現実空間に配された位置が既知である指標の位置の補正に用いるかを判定し、補正に用いると判定された画像を用いて、指標の位置を補正する。
(もっと読む)
三次元計測治具及びこれを用いた三次元計測方法
【課題】計測点が平面にある場合や縁にある場合の計測精度の向上を実現したうえで、計測点が凹面にある場合であったとしても、この計測点の三次元座標を正確に計測することが可能である三次元計測治具及びこれを用いた三次元計測方法を提供する。
【解決手段】レーザ測定機LによってワークW上における計測点Pの三次元座標を得るのに用いられる球状のリフレクタRを保持する三次元計測治具1であって、リフレクタRをスライド可能に保持する計測溝4と、ワークW上における計測点Pに接する指示点31を備え、計測溝4は、計測点Pがある部位に対して接近離間する方向に形成され、少なくとも計測溝4の計測点Pから離れた遠端部41で保持するリフレクタRの中心Rpと、計測溝4の計測点P寄りの近端部42で保持するリフレクタRの中心Rpとを結ぶ線分dの延長線上に、指示点31が配置されている。
(もっと読む)
車両寸法計測装置
【課題】反射材を備えるターゲットが複数設置された車両をステレオカメラにより撮影した画像のみに基づいて、車両の寸法を精度良く計測できる車両寸法計測装置を提供する。
【解決手段】 車両2の車長に合わせて設置され、既知の高さに設定される車長用ターゲット3と、車両2の車幅に合わせて設置され、車長用ターゲット3と同一の高さに設定される車幅用ターゲット4と、車両2の最も高い位置に設置される車高用ターゲット5と、車両2の車軸方向に沿うように設置され、車長用ターゲット3及び車幅用ターゲット4と異なる既知の高さに設定される車軸用ターゲット6と、夫々のターゲット3〜6が設定された車両2を撮影するステレオカメラ7と、該ステレオカメラ7から得た画像に基づいて、車両2の寸法を計測する演算装置とを備える車両寸法計測装置1。
(もっと読む)
現場作業支援システムにおけるマーカ配置方法
【課題】現場作業支援システムにおけるトラッキング誤差の軽減を実現するマーカ配置方法を提供する。
【解決手段】予め作業現場に設置されたラインマーカ5a,5bと、作業者が携行するカメラ1a〜1cと、作業現場の画像と指示情報を表示して作業者に提供するHMD2と、前記カメラで作業現場を撮影して得た撮影画像中の前記ラインマーカの画像位置に基づいてカメラ(作業者)の位置と向きを計測し、作業者に対して提供する情報画像を作業現場の画像に重ねて前記HMDに表示させる情報処理を行う情報処理装置3を備えた現場作業支援システムにおいて、ラインマーカの位置は、(1)画像処理によって得られるコードマークに含まれる誤差の大きさの推定し、(2)(1)の結果と誤差計算手法及び遺伝的アルゴリズムを用い、様々なラインマーカ配置におけるトラッキング誤差を推定し、ラインマーカの配置を繰り返し計算して誤差を小さくできる位置に決定する。
(もっと読む)
ケーブル弛度観測システム
【課題】 ケーブルの弛度観測を容易かつ適正に行えるようにする。
【解決手段】 弛度測定装置10に、送電線Eの弛み部を撮影する主カメラ20と、主カメラ20を載置し主カメラ20による撮影方向を調節自在な雲台20と、を備え、地上側装置として、弛度測定装置10に制御指令を送信するリモコン50と、主カメラ20による撮影画像を表示するモニタ60と、を備え、リモコン50からの制御指令により、主カメラ20と雲台20とが制御可能となっている。
(もっと読む)
移動型入力装置、その校正方法、および校正のためのプログラムを記憶したコンピュータ読み取り可能な記録媒体
【課題】座標を入力するための移動型入力装置、前記装置を構成する方法、および前記方法をコンピュータに実装させるコンピュータプログラムを記録したコンピュータ読み取り可能な記録メディアを提供する。
【解決手段】前記移動型入力装置は、2台のデジタルカメラと、校正ツールと、記憶部と、入力面に置いた対象物の座標を、前記2台のデジタルカメラの画像によって、前記校正ツールを含むように撮像した画像にもとづいて、前記入力面の対象物の座標を計算する制御部と、を有する。前記制御部は、また、前記入力面の近傍に規定された入力区域に対応する検出帯の位置および幅を構成する。前記検出帯の前記位置および前記幅は、前記入力面の位置に関連付けて前記記憶部に記憶される。
(もっと読む)
三次元測定システムおよび三次元測定方法
【課題】三次元形状を測定する三次元測定の作業性を改善できる技術を提供する。
【解決手段】複数の識別点が設けられた対象物の三次元形状のうち第1領域に第1検出光および第2検出光を時間的に順次に投光する検出光投光手段と、検出光投光手段からの投光によって照明された第1領域の画像を撮影する画像撮影手段と、第1検出光が投光されたときの画像に基づいて第1領域の三次元形状を表現した三次元形状データを取得する形状取得手段と、第2検出光が投光されたときの前記画像に基づいて第1領域に設けられた複数の着目識別点のそれぞれの位置を表現した第1位置データを取得する位置取得手段と、前記第1位置データに基づいて、前記複数の着目識別点のそれぞれの位置を示す第1位置指示光を前記対象物に向けて投光する指示光投光手段を備える。
(もっと読む)
1 - 20 / 64
[ Back to top ]