
Fターム[2F065NN11]の内容
光学的手段による測長装置 (194,290) | 制御 (2,523) | 受光部の (262)
Fターム[2F065NN11]の下位に属するFターム
Fターム[2F065NN11]に分類される特許
81 - 100 / 140
位置寸法測定装置
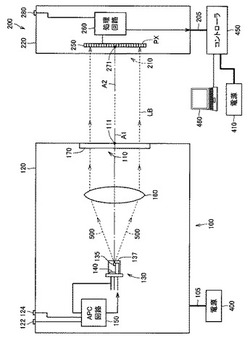
【課題】容易、かつ、確実に光軸を調整することが可能な位置形状測定装置を提供する。
【解決手段】光軸調整処理時には、処理回路260は複数の画素PXにより形成される受光領域を、その中心線により2つの領域に仮想的に分割する。そして、処理回路260はその2つの領域の一方(第1の領域)での受光量と他方(第2の領域)での受光量とを算出する。光軸A1と光軸A2とが一致した場合には、第1の領域の受光量と第2の領域の受光量とのバランスが取れた状態になる。一方、光軸A2に対して光軸A1がずれた場合には、第1の領域の受光量と第2の領域の受光量とがアンバランスになる。処理回路260は算出した受光領域の受光量分布に基づいて、第1の領域での受光量と第2の領域での受光量とのバランスに関する受光量バランス情報を生成して出力し、LED280を点灯あるいは消灯させる。
(もっと読む)
物体検知装置

【課題】小型かつ安全な物体検知装置を提供する。
【解決手段】物体検知装置1は、光を被検知領域に照射する発光素子2と、被検知領域にある被検知物Wから反射された反射光を受光する受光素子3と、受光素子3を回転させる回転駆動手段4と、受光素3子により受光された反射光の強度を検知する検知手段5とを備える。回転駆動手段4は、少なくとも一対の圧電ユニモルフ振動板と、圧電ユニモルフ振動板の一端を固定して支持する空洞部を有する支持体と、圧電ユニモルフ振動板に弾性体を介して接続され、圧電ユニモルフ振動板の圧電駆動により空洞部内で回転振動する基板とで構成される。基板上に受光素子3が配置され、該基板の回転角度に対する反射光の強度分布から被検知物Wの位置を求める。
(もっと読む)
欠陥検出装置および欠陥検出方法
【課題】所定サイズ以上の大欠陥がある場合に対応して検査時間を短縮することができる欠陥検出装置および欠陥検出方法を提供する。
【解決手段】1次欠陥検出部36は、検査対象物上の所定サイズ以上の大欠陥の有無を検出する1次欠陥検出処理を実行する。2次欠陥検出部37は、検査対象物の画像データを用いて検査対象物上の欠陥を検出する2次欠陥検出処理を実行する。処理制御部38は、2次欠陥検出処理の開始前に1次欠陥検出処理で大欠陥が検出された場合に2次欠陥検出処理を省略する、または2次欠陥検出処理の開始後に1次欠陥検出処理で大欠陥が検出された場合に2次欠陥検出処理を途中で終了する。
(もっと読む)
高さ測定装置
【課題】大面積の被測定物上の各部の高さ測定を短時間に行なう。
【解決手段】カラーフィルタ基板7を一定方向に搬送し、カラーフィルタ基板7の搬送方向及び該搬送方向と交差する方向に沿ってマトリクス状に配列した複数のビーム光をカラーフィルタ基板7に向けて照射し、複数のビーム光のうち搬送方向に交差する各列のビーム光を列毎にカラーフィルタ基板7の表面近傍の異なる高さ位置に集光させ、各列の各ビーム光により照射されたカラーフィルタ基板7上の各測定点からの反射光の輝度を検出し、該検出された複数の輝度のうちから、カラーフィルタ基板7が搬送されることにより同一の測定点が各列のビーム光により異なるタイミングで照射されて得られた複数の輝度を測定点毎に抽出し、抽出された複数の輝度に基づいて各測定点における反射光のピーク輝度を演算し、各ピーク輝度により各測定点の高さを求めるものである。
(もっと読む)
形状測定方法
【課題】鏡面反射光の影響を受けることなく正確な三次元形状測定を行う。
【解決手段】被検物20に所定の投影パターンを投影するパターン投影系と、投影パターンが投影された被検物を撮像する第1の開口数NA1を有した第1撮像装置6と、これと同一光軸上において被検物を撮像する第2の開口数NA2を有した第2撮像装置8と、被検物に対する光軸方向の相対位置を調整する位置調整器とを備えて形状測定器が構成される。Z1位置およびZ2位置において、投影パターンを投影した被検物を、第1および第2撮像系により撮像して第1(Z1)および第2(Z1)測定画像並びに第2(Z1)および第2(Z2)測定画像を取得し、所定画像位置における第1位置ずれ(Δd1)と第2位置ずれ(Δd2)とから、所定画像位置に対して合焦する合焦位置(Z0)を求め、所定画像位置における合焦位置(Z0)での測定画像から所定画像位置の光軸方向位置を求め、前記被検物の三次元形状を求める。
(もっと読む)
断面形状計測方法及び断面形状計測装置
【課題】熱間丸棒体の断面形状を計測するに際し、該熱間丸棒体の正確な回転角度を知ることができなくても、当該断面形状を精度よく計測する。
【解決手段】軸心廻りに回転可能な熱間丸棒体Wの断面計測位置に向けて軸心に垂直なスリット光を投光し、スリット光を撮像して断面計測位置での熱間丸棒体Wの部分断面パターンを撮像し、このときの熱間丸棒体Wの外周面を撮像して部分断面パターンとセットとなる濃淡画像を取得し、その後に熱間丸棒体Wを軸心廻りに所定量回転させ、これらを繰り返し行って熱間丸棒体一周分の部分断面パターンと濃淡画像のデータセットを取得し、各濃淡画像に基づいて部分断面パターンを繋ぎ合わせる。
(もっと読む)
撮像システム及び撮像方法
【課題】 リブの高さを測定するために、リブを精度よく高速に読み取る。
【解決手段】 液晶パネルのカラーフィルタ基板10に形成されるブラックマトリックス11上に配置されるリブ13の高さを測定する際に、カメラ20の撮像範囲の幅とブラックマトリックス11の幅がほぼ等しく、カメラ20の撮像素子の走査方向をブラックマトリックス11の行方向に合わせ、カメラ20をブラックマトリックス11上に移動させ、カメラ20でブラックマトリックス11上を撮像しながら、カメラ20をブラックマトリックス11の行方向に移動させ、ブラックマトリックス11上のリブ13の画像を読み取り、読み取った画像からリブ13の高さを求める。
(もっと読む)
画像情報取得装置
【課題】レーザ光を測定対象物に照射し測定対象物からの反射光を受光することにより測定対象物の画像データを自動的に取得する装置であって、測定対象物の表面が光沢面であっても、正確かつ迅速に画像データを取得する。
【解決手段】画像情報取得装置は、時間変調レーザ光を照射するレーザ光出射部と、測定対象物からの反射光を受光する光電変換器と、複数のマイクロミラーを有し、選択されたマイクロミラーの反射面を制御してレーザ光を光電変換器に導く空間変調素子と、光電変換器で受光されたレーザ光の位相ずれ情報を用いて測定対象物の3次元位置データ及び反射強度データを取得するデータ処理部と、各部分の動作を制御する制御器と、を有する。データ処理部で取得される反射強度データのレベルが所定の閾値を超える場合、ON状態にするマイクロミラーの反射面の個数を絞った反射パターンに調整して、再度計測を行う。
(もっと読む)
莢果選別装置
【課題】莢果の等級に基づき莢果を適切に選別する。
【解決手段】莢果選別装置10では、莢果22がベルト40上の搬送路48内を搬送されて、フラッパエジェクタ76の板バネ78へ落下する。さらに、搬送路48内を搬送される莢果22が透過光カメラ64によって撮像されて莢果22の等級が判別され、莢果22が不良品であると判別されると板バネ78が当該莢果22を弾くことで、莢果22が良品と不良品とに選別される。ここで、ベルト40が網目状にされているため、ランプ安定器58がベルト40を介して透過光を莢果22へ照射できて莢果22を透過した透過光によって透過光カメラ64が莢果22を適切に撮像でき、莢果22を適切に選別できる。
(もっと読む)
板材の平坦度測定方法及び板材の平坦度測定装置
【課題】明瞭に線状パターンを撮影することができ、かつ簡易的な板材の平坦度測定方法を提供する。
【解決手段】平行な複数の線14、14、…からなる線状パターン12を板材11の表面に投影する投影機13と、板材11に投影された線状パターン12を撮影するカメラ15a、15bを備え、線14、14、…の長手方向について、線状パターン12の大きさを板材11より大きくすることにより、板材11の端辺を検出する工程を有する平坦度測定方法を用いる。
(もっと読む)
ねじ付容器の印刷装置
【課題】マンドレルの操作に用いるサーボモータの数を減少させたねじ付容器の印刷装置を提供する。
【解決手段】ねじ付チューブ11を保持するマンドレル12と、そのマンドレル12を保持するターンテーブル13と、そのターンテーブルに取り付けられたエンコーダ14と、定速回転する円筒状のブランケット胴15と、そのブランケット胴の外面に取り付けられたブランケット16と、チューブのねじ切り始めを撮影し、その位置情報を検出するカメラ17、カメラコントローラ17aと、マンドレルを軸方向に回転させるサーボモータ21と、このサーボモータの回転速度を操作するサーボコントローラ19とからなる印刷装置10。サーボコントローラは、ターンテーブルが間欠移動するときに、印刷ステーションでチューブの印刷部位の始点と、ブランケットの始点とが当接するように操作し、その後、チューブをブランケットの回転と同期するように操作する。
(もっと読む)
変位センサ
【課題】ユーザにとっての使い勝手を向上させることが可能な変位センサを提供する。
【解決手段】レーザダイオード207から発せられたレーザビームは計測対象300の表面に照射される。これにより反射光L2が生じる。撮像素子205は反射光L2を受ける。センサヘッド部200から距離Bだけ離れた測定基準位置(測定中心)に対応する受光位置(受光基準位置)を必ず含むように撮像素子205の撮像領域に処理対象領域が特定される。センサ本体部はこの処理対象領域から読み出した信号に基づいて変位計測処理を行なう。測定範囲あるいは測定精度が変更された場合にも処理対象領域の中に受光基準位置が必ず含まれるので変位センサと計測対象との距離を変えることなく変位量の計測が可能になる。
(もっと読む)
画像作成センサーを備えた動的画像記録
光学画像記録系を有し、測定対象と上記光学画像記録系の間で相対移動するようになった測定系において、上記画像記録系(3)の焦点(F)は走査方向に揺動するように設けられ、走査動作での焦点の揺れ動作の重なりによって、焦点(F)が測定対象(2)の表面にとどまるか対応してカメラチップ(7)に投影された画像がカメラチップ上に止まる画像記録インターバルを生成する。これは好ましくは、測定対象と画像記録系の間の安定し加速しない相対移動の間に起こる。画像エッジのぶれは、比較的長い露出時間とごく並みの照射強度にもかかわらず防がれる。  (もっと読む)
(もっと読む)
モーションピクチャ又はビデオゲームにおける量子ナノドットの使用
量子ナノドット処理システムは、可視帯域において演技者及び/又はオブジェクトを含むシーンをキャプチャするよう構成された少なくとも1つの画像キャプチャカメラと、少なくとも1つの量子ナノドット(QD)マーカが付された演技者及び/又はオブジェクトの動きをキャプチャするよう構成された少なくとも1つのマーカキャプチャカメラとを備え、少なくとも1つのマーカキャプチャカメラは、少なくとも1つのQDマーカによって放出される狭帯域IR信号をキャプチャするようにチューニングされている。 (もっと読む)
改善された光学測距カメラ
【課題】一つの情景中の全ての画素から実質的に同時に深度情報を得る、改善された測距カメラを提供する。
【解決手段】情景中の被写体までの距離を示す画像を生成するための装置であって、第1変調関数を有し、情景に向かって放射波を向きづける変調された放射波源と、上記情景から反射され、第2変調関数により変調された放射波を検知し、上記検知され変調された放射波に応じて、上記情景の領域までの距離に対応する信号を発生する第1検知器と、上記情景から反射され、上記第2変調関数により変調されない放射波を検知するとともに、上記検知された放射波に応じて上記情景の領域から反射された光の強度に応じた信号を発生する、上記第1検知器とボアサイトされた第2検知器と、上記第1および第2検知器から信号を受信するとともに、上記装置からの被写体の距離を示す強度分布を有する、上記信号に基づいて画像を形成するプロセッサと、を含む。
(もっと読む)
光透過性シートの検査装置および検査方法
【課題】被検査体内部あるは表面に生じる光学歪みをわずかに生じる欠点の有無を高精度に検出する。
【解決手段】被検査体1である光透過性シートを挟んで配設される投光手段2および受光手段7、フォーカスが前記被検査体表面に合わされ受光手段に光を集光して入射するレンズ9と、被検査体と投光手段との間に配設される遮光体6とを有し、受光手段の受光軸上に投光手段、および遮光体の中心が一致し、かつ受光手段の視野幅方向と投光手段長手方向、遮光体長手方向がそれぞれ平行となるように投光手段と遮光体が配設され、遮光体の長手方向と垂直な方向の幅Aが、レンズと被検査体との距離をL1、被検査体と遮光体との距離をL2、レンズ開口径をWとしたときに、0.9×L2/L1×W≦A≦1.1×L2/L1×Wであり、かつ投光手段の光照射面の、投光手段の長手方向と垂直な方向の幅が2A以上3A以下とする。
(もっと読む)
ライン型カラーカメラの撮影姿勢調整方法
【課題】ライン型カラーカメラを用いて画像の取得を行う際に、倍率と、搬送面及び搬送方向に対するライン型カラーカメラの傾きとを確認し、同時に撮影姿勢の調整及び決定を行う。
【解決手段】被撮影面25が黒色である平板状体の、被撮影面にR、G、及びBの合同な二等辺三角形のマーク27を複数有する調整用媒体23を用いる。マークは、それぞれの色毎に隣接して、底辺が一直線上に存在するようにR、G、及びBの3つのマーク列29を構成している。マーク列は、互いに平行かつ等間隔で配列され、かつ全てのマーク列を構成する二等辺三角形の頂点が同一方向を向いている。隣り合うマーク列は、一方のマーク列に属する二等辺三角形の頂点と、他方のマーク列に属する二等辺三角形の底辺とで接している。この調整用媒体を、搬送面30上に、搬送方向に対してマーク列が垂直となるように、設置する。
(もっと読む)
駐車支援装置
【課題】より高精度に駐車空間を検出する。
【解決手段】処理ユニット5において、スリット光を照射する発光部2から車両10の側方部にスリット光を照射させると共に、車両10に搭載されたカメラ1で撮影された車両側方部の画像を入力し、この画像の中から撮影されたスリット光が屈曲する屈曲点を検出して、この屈曲点に基づいて車両周辺物体と車両10との距離を算出する。そして、この距離に基づいて車両の側方部に駐車空間を抽出し、ドライバに対して駐車支援と行う。
(もっと読む)
3次元形状測定方法およびその装置
【課題】測定対象物の表面の色の明暗に依存することなく、測定対象物の全表面の形状を測定することができるようにする。
【解決手段】2値化投影パターンを投影された測定対象物からの反射光画像を撮像し、該撮像した反射光画像を用いて空間コード画像を生成する空間コード化法により上記測定対象物の3次元形状を測定する3次元形状測定方法において、2値化投影パターンを投影された測定対象物からの反射光画像を異なる露光時間で撮像し、該異なる露光時間で撮像した反射光画像を合成して多重シャッタースピード画像を生成し、該多重シャッタースピード画像に基づいて空間コード画像を生成する。
(もっと読む)
パンタグラフ摺板計測装置
【課題】画像処理に適した輝度を持つ画像を容易に得ることのできるようにしたい。
【解決手段】パンタグラフ4およびその摺板に対する照明器具10とパンタグラフ4およびその摺板を撮像するカメラ2との間に、光量を摺板の長手方向において2次元的に調整できるフィルタ71を設ける。
(もっと読む)
81 - 100 / 140
[ Back to top ]