
Fターム[2F065NN11]の内容
光学的手段による測長装置 (194,290) | 制御 (2,523) | 受光部の (262)
Fターム[2F065NN11]の下位に属するFターム
Fターム[2F065NN11]に分類される特許
21 - 40 / 140
カメラ校正装置
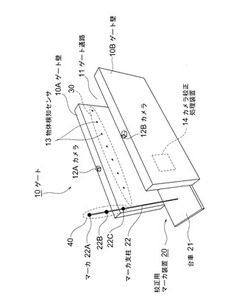
【課題】自動改札機等のゲートに取り付けられたステレオカメラ等の校正で校正用マーカを簡単に設置でき、校正作業の手間を軽減きるようにしたカメラ校正装置を提供する。
【解決手段】カメラ校正装置は、ゲート通路11を有しかつカメラ12A,12Bと物体検知センサ13を備えるゲート10でカメラの校正を行うカメラ校正装置であって、ゲート通路を自在に移動する台車21と、高さ位置が既知であるマーカ22A,22B,22Cが取り付けられたマーカ支柱22を備える校正用マーカ装置20と、物体検知センサで校正用マーカ装置の位置を検知したとき、カメラの撮影で得た画像情報からマーカの情報を取り出し、マーカの情報に基づき校正用カメラパラメータを算出するカメラ校正用処理装置14とを備える。
(もっと読む)
変位検出装置

【課題】対物レンズを正確に変位させることにより、精度の高い測定を行うことのできる変位検出装置を提供する。
【解決手段】変位検出装置1では、対物レンズ3が光源2からの出射光を被測定面101に向けて集光する。被測定面101からの反射光の光路は、分離光学系4により光源2から出射光の光路と分離される。分離光学系4を通った反射光は、集光手段7により集光され、非点収差発生手段8により非点収差が発生した状態で受光部9に入射する。受光部9の直近に設けられた入射光束径調整手段12は、受光部9へ入射する被測定面からの反射光の光束径を調整する。位置情報生成部10は、受光部9で検出した光量から得られるフォーカスエラー信号及びSUM信号を用いて被測定面101の位置情報を生成する。
(もっと読む)
シートに塗工された塗工パターンの形状測定方法及び装置
【課題】塗工パターンの幅方向および搬送方向の測定の同時性を実現し、光軸方向の距離変動の影響も無くすことができる塗工パターンの測定方法及び装置を提供する。
【解決手段】 シートに塗工された塗工パターンの形状測定方法において、
1)シートの搬送方向に直交して水平ラインの撮影方向に複数のカメラを並べ、前記シートを前記複数のカメラで撮影する工程、
2)撮影した映像の水平走査信号または垂直走査信号の少なくとも一方を水平走査に同期させ前記複数のカメラの水平走査信号を順次切り替えて画像処理手段に取り込む工程を含んでいる。
(もっと読む)
物品認識装置及びこれを用いた物品処理装置
【課題】認識対象物品の位置及び姿勢に関する配置情報を高精度に認識する。
【解決手段】認識対象物品1に設けられ、中心位置Cから周囲に向かって濃度パターンPcが順次変化するように形成される単位パターン印13を予め決められた位置関係で四以上有する認識表示体12と、認識対象物品1に対向配置されて認識表示体12を撮像する撮像具5と、この撮像具5の撮像面とこの撮像具5の視野範囲に入る認識対象物品1に設けられる認識表示体12面とが正対しない非正対計測位置P2に少なくとも撮像具5を設置可能とするように撮像具5を支持する支持機構6と、非正対計測位置P2に配置された撮像具5にて撮像された認識表示体12の撮像情報を少なくとも用い、認識対象物品1の位置及び姿勢に関する配置情報を認識する配置情報認識部7と、を備える。また、この物品認識装置を用いた物品処理装置をも含む。
(もっと読む)
外観検査装置
【課題】太陽電ウエハの3次元形状を正確かつ高速に算出する。
【解決手段】第1及び第2形状算出部24,34は、撮像部20により所定のフレームレートで連続的に撮像された複数枚の光切断線画像の画像データを基に、ウエハ50の表面の3次元形状データを算出する。ここで、第1形状算出部24は、カメラ21〜23が現フレームの光切断線画像を撮像する期間に、1つ前のフレームに探索処理を行うと同時に、2つ前のフレームの光切断線画像に重心算出処理を行う。
(もっと読む)
二次元変位センサ
【課題】受光信号に基づく認識形状と対象物の実形状との相違により、対象物の変位測定の精度が低下することを抑制することが可能な二次元変位センサを提供する。
【解決手段】二次元変位センサ1は、ユーザが、認識形状M2が表示された前記表示部の表示画面内で対象物の対象領域を指定可能な指定部37と、その対象領域に対応する二次元撮像部15の撮像面上の領域内の画素からの受光信号に基づいて対象物の変位測定を行う変位測定部33と、を備え、二次元撮像部からの受光信号に基づき、認識形状のうち、対象物において測定方向に直交する方向に沿った直線部分に相当する直線領域Nを抽出し、表示画面内において直線領域を、認識形状の他の領域と区別可能に表示させる。
(もっと読む)
投影照明の画像センサの回転シャッタとの同期
【課題】CMOSセンサーによる撮像時に、投影照明と回転シャッタとの同期を取る。
【解決手段】画像形成装置は照明組立体を有し、照明組立体は、複数の放射源と投影光学系を有し、放射源から視覚野の異なるそれぞれの領域の上へ放射を投影するように構成される。画像形成組立体は、画像センサ上に視覚野の光学的画像を形成するように構成された、画像センサと対物光学系を有し、画像センサは、多重のグループ内に配置されたセンサ要素の1配列を有し、画像センサは、視覚野の電子画像を形成するため、回転シャッタによりトリガーされて、連続するそれぞれの露出期間において、視覚野の異なるそれぞれの区域からの放射を獲得する。制御装置は、照明組立体が視覚野の異なるそれぞれの区域を前記回転シャッタと同期して照明するために、放射源をパルスモードで順次活性化するように接続される。
(もっと読む)
複眼カメラおよびカメラ応用機器
【課題】視野角を拡大した画像を生成すると共に、カメラ画像から同程度の視野角の被写体の距離を測定可能とした複眼カメラを提供し、新たな機能の実現や低コストで高性能なカメラ応用機器を提供する。
【解決手段】水平画角αの同一の2つのカメラa、bのレンズ中心を含む平面上でカメラa,bの光軸を水平画角αと同じ角度αで交差するように配置し、画像を合成することで、2αの視野のワイド画像を生成し、距離測定をできる。さらに同様の配置を行う4眼カメラの場合、垂直方向も2βの視野の画面を生成でき、距離測定範囲も同様に拡大できる。また背景画像を記憶し移動物・人物抽出部により背景の変化を記録することで、送信や記録の画像情報データ量を削減すると同時に忘れ物記憶や置き場所当てゲームなどができ、また動き出部情報から人物の体形情報を成長記録として残せ、また教師の動き情報との比較からダンス等の採点などの機能を提供できる。
(もっと読む)
3次元形状計測方法および3次元形状計測装置
【課題】位相シフト法を用いて計測対象物の3次元形状を計測する際に、実際には存在しない凹凸が生じることを抑制する。
【解決手段】縞パターンを計測対象物に投影し、前記計測対象物を撮影する。前記縞パターンの位相を所定方向にずらしながら前記投影および前記撮影を順次繰り返す第1ステップと、前記第1ステップで得られた複数の撮影画像における同一画素での受光量変化に基づいて、各画素における前記縞パターンの位相を演算する第2ステップと、撮影画像の各画素の位相に基づいて前記計測対象物の3次元形状を特定する第3ステップとを備える。前記第2ステップにおいて、各画素の位相を演算する際に、少なくとも当該画素の前記所定方向の両隣に位置する2つの画素の受光量に基づいて、当該画素の受光量変化を補正する。
(もっと読む)
厚み情報取得装置、厚み情報取得方法、厚み情報取得プログラム及び顕微鏡
【課題】本発明は、サンプルの厚み情報を短時間で精度よく取得する。
【解決手段】本発明は、取得した位相差像の基準像に対する相関状態を算出し、該相関状態に応じて組織切片TSの厚み情報を取得するようにしたことにより、1つの位相差像から組織切片TSの厚み情報が取得でき、またサンプルの厚み方向の分布を反映した厚み情報を取得することができ、かくして厚み情報を短時間で精度よく取得することができる。
(もっと読む)
三次元形状測定装置、三次元形状測定方法、三次元形状測定プログラム、および記録媒体
【課題】高精度に移動物体の三次元形状を測定する。
【解決手段】位相パターンが投影された移動物体およびバックスクリーンからの反射パターンを位相シフトして撮像された位相画像データを取得する映像入力I/F部と、位相画像データからエッジを検出し、そのエッジの強さに応じた画像特徴量データを抽出する画像特徴量抽出部201と、画像特徴量抽出部201が抽出した位相1周期分の画像特徴量データ列に基づいて格子幅を調整した位相パターンデータを生成する位相パターン生成部203と、位相1周期分の位相画像データ列に基づいて位相分布画像データを生成する位相分布画像生成部212と、位相分布画像データの位相接続を行って連続位相分布画像データを生成する位相接続部213と、連続位相分布画像データに基づいて移動物体の三次元形状データを生成する三次元形状生成部214とを備えた。
(もっと読む)
被覆電線検査装置及びこれを備えた電線処理機
【課題】被覆が剥離された被覆電線端部の良否をより一層的確に検査することのできる被覆電線検査装置を提供する。
【解決手段】被覆が剥離された被覆電線Rの端部の状態を検査する被覆電線検査装置Bであって、前記被覆電線Rを搬送する搬送ユニットと、被覆が剥離された前記被覆電線Rの芯線Sを撮像する撮像手段3a、3bと、該撮像手段3a、3bにより撮像された画像に基づいて前記剥離の良否を判定する判定手段6と、該判定手段6による判定が不良であった場合に、前記剥離の良否を目視で判定すべく、前記被覆電線Rを前記搬送ユニットにより前記撮像手段3a、3b側に搬送させて、該撮像手段3a、3bにより再度撮像される前記芯線Sの画像を表示する表示手段7とを備えている。
(もっと読む)
光学式位置検出装置、ハンド装置およびタッチパネル
【課題】比較的簡素な構成および信号処理で、対象物体の位置や、対象物体が至近位置に到達したことを確実に検出することのできる光学式位置検出装置、並びに当該光学式位置装置を備えたハンド装置およびタッチパネルを提供すること。
【解決手段】光学式位置検出装置10では、光源装置11が透光部材40において対象物体Obが位置する第1面41側とは反対側の第2面42側から検出光L2を出射して第1面41側に第1面41に対する法線方向で強度が変化する離間距離検出用光強度分布L2Zabを形成する。また、対象物体Obで反射して透光部材40の第2面42側に透過してきた反射光L3を光検出器30で検出する。透光部材40の第1面41は、弾性および対象物体Obに対する吸着性を備えている。
(もっと読む)
3次元位置計測装置および3次元位置計測方法
【課題】3次元位置の計測精度を向上させる。
【解決手段】3次元位置計測装置1は、移動体に設置された複数のカメラ#1〜#nと、カメラ#1〜#nで撮影された映像から任意の対象物の3次元位置を計測する3次元位置計測部1aとを備える。カメラ#1〜#nは、少なくとも1組のカメラ対が共通視野を持つように配置する。また、3次元位置計測部1aは、共通視野の映像に対して複眼ステレオ視制御により周囲の3次元位置を計測して移動体の移動量を推定する。そして、推定した移動量にもとづき、単眼移動ステレオ視制御により対象物の3次元位置を計測する。
(もっと読む)
走行体の先頭位置検出方法及び装置
【課題】背景の変化や走行体から発せられる光等の外乱による誤検知を可能な限り少なくした走行体の先頭位置検出方法及び装置を提供する。
【解決手段】本発明の走行体3の先頭位置検出方法は、走行体3の先頭部及び背景を画像センサ5により連続的に撮像し、撮像された画像を基に、連続する2つの画像間の差分画像を算出し、算出された差分画像に関し、走行体3の走行方向に垂直な方向に沿った輝度積算を行うことで差分投影輝度分布を算出し、算出された差分投影輝度分布に対し、所定の輝度閾値を超え始める位置を検出し、検出された位置を走行体3の先頭部の位置と認識する。
(もっと読む)
画像処理方法
【課題】立体的な対象物体の三次元形状を計測する際に問題となる画像中に観測される垂直成分領域の判定を行う画像処理方法を提供する。
【解決手段】画像処理方法は、照明装置F1で対象物Qを照明し、カメラC1によって撮像した2次元画像データFD12を得る第一撮像工程と、第一撮像工程と同一のカメラC1によって同一の対象物Qを、対象物Qの側面への照明条件が照明装置F1と異なる補助照明F21で照明して撮像した2次元画像データFD13を得る第二撮像工程と、を行い、この2次元画像データFD12とFD13とから反射光量による輝度値の変動領域から対象物の側面を示す垂直成分領域を判定する判定工程とを具備するようにし、対象物Qの側面領域が容易に抽出可能になる効果を奏する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】3次元画像処理といった、複数の撮像部からそれぞれ生成される画像データを処理することのできる画像処理装置において、特定の画像処理に必要な複数の画像データをそれぞれ生成する複数の撮像部に対する各種設定を容易に行うことのできる画像処理装置を提供することである。また、そのような画像処理装置に向けられた画像処理プログラムを提供する。
【解決手段】接続される複数の撮像部をいくつかのグループに分けた上で、各グループに属する撮像部を一まとまりにして、必要な撮像条件を設定するためのユーザインターフェイスを提供する。
(もっと読む)
非接触計測装置および非接触計測方法
【課題】同期信号等の出力インタフェースを有しないカメラを使用し、撮像と被測定物またはカメラの位置情報を、制御回路を使用せずに同期して撮像を行う非接触計測装置および非接触計測方法を提供することを課題としている。
【解決手段】非接触計測装置は、アクチュエーター10、レーザー12、カメラ13、信号処理・制御ユニット20、画像表示装置30から構成されている。信号処理・制御ユニット20は、制御部101と、画像データ取り込み部102と、グレースケール変換部103と、画像データ記憶部104と、相関比較部105と、停止判定部106と、輝度抽出部107と、重心算出部108と、高さ算出部109と、計測結果出力部110とから構成されている。
(もっと読む)
搬送監視装置および搬送監視方法
【課題】被搬送物と撮像部との間に透明体が介在する監視環境にあっても、被搬送物の搬送状態を高精度に管理可能な装置及び方法を提供する。
【解決手段】第1の搬送監視装置10Aは、透明体1越しに被搬送物2の搬送状態を監視し、被搬送物2及び搬送部3の画像を取得する撮像部11と、撮像部11が取得した画像のベクトルデータを演算する演算部12と、被搬送物2及び搬送部3のモデルデータを記憶する記憶部13,14と、画像中の被搬送物2及び搬送部3の位置を抽出する位置抽出部15,16と、被搬送物2及び搬送部3の相対的位置を算出する相対位置算出部17と、被搬送物2及び搬送部3の正常な相対的位置関係を記憶する記憶部18と、相対位置算出部17が算出した相対位置が正常か否かを判定する判定部19と、判定部19での判定結果に応じて所定の警告を発する警告部20とを具備する。
(もっと読む)
三次元情報計測装置および三次元情報計測方法
【課題】金属や陶磁器などの他、自動車やその部品などの光沢塗装が施されるなどして表面反射の強い計測対象物であっても、パターン光投影による三次元情報の計測を可能にする。
【解決手段】パターン光を計測対象物に直接当たらないように投影するパターン光投影装置1と、パターン光投影装置1により投影されたパターン光を反射して計測対象物Aに投影する反射板2と、反射板2により反射されたパターン光が投影された計測対象物Aを撮像して投影パターン画像を取得するカメラ装置3であり、レンズの光軸が反射板2により反射されたパターン光の投影方向と同一でないカメラ装置3と、投影パターン画像から計測対象物Aの三次元情報を算出するデータ処理装置4とを含む。
(もっと読む)
21 - 40 / 140
[ Back to top ]