
Fターム[2F065PP01]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 検出器の支持、保持関連 (1,622)
Fターム[2F065PP01]の下位に属するFターム
Fターム[2F065PP01]に分類される特許
301 - 320 / 320
FBG超音波センサの被検体への取り付け構造及び取り付け方法

【課題】FBGをセンサとする超音波計測装置を用いて超音波を検出する際に、FBGを超音波センサとして用いた場合、センサ部であるグレーティングの被検体への貼り付け方法を工夫することにより、超音波検出感度を向上させ、健全性評価の精度を高める。
【解決手段】従来はFBGセンサ5のセンサ部であるグレーティング8は、その全体が被検体9へ完全に接着する(これを「完全接着」という。)方法が取られている(図1(a)参照)のに対して、この本発明では、FBGセンサ5のグレーティング8両端から両側方に離れた箇所のみを被検体9に接着する方法(これを「ブリッジ接着」と名づけた。)を採用し(図1(b)参照)、FBGセンサ5の超音波検出感度を向上させることができる。
(もっと読む)
光ファイバー計測モジュール
光ファイバコア2aとクラッド2bと被覆層2cとを有する光ファイバー芯線2と、この光ファイバー芯線2を保持する基材3と、この基材3を構造物1に取り付けるための取り合い部材4とを備えた。  (もっと読む)
(もっと読む)
被写体距離計測装置および方法

【課題】 パッシブ方式にて、被写体にコントラストがない場合も距離計測可能とする。
【解決手段】 被写体撮像光学系12は、平行平面板の繰返し反射干渉により光束の波長帯域を狭帯域化する繰返し反射干渉フィルター20と、集光レンズ22と、バンドパスフィルター24と、受光素子26とを有する。回転ステージ14は、被写体撮像光学系12を回転させる。距離計測部16は、回転ステージ14による被写体撮像光学系12の回転に伴い受光素子26の面内を移動する同一被写体像の強度変化のコントラストを計測し、被写体までの距離演算を行う。
(もっと読む)
三次元計測方法および三次元計測装置
【課題】透明または半透明の製品内の不良部分等の高さ位置の検出を高速で行う。
【解決手段】異なる角度で設置された2つのカメラ3、4の撮像範囲を合わせて、透明または半透明の被検査物W内の異物を同時に撮影し、各カメラ3、4の画面上の異物の重心位置をコンピュータ7の記憶装置に取込み、カメラ3、4による異物の位置情報に基づき、予め記憶された各カメラ3、4の設置角度およびカメラ5による被検査物Wの厚み情報等を用いた演算によって、被検査物W内の異物の高さ位置を算出する。
(もっと読む)
線条体の位置検出装置及び線条体の位置検出方法
【解決手段】 本発明の線条体の位置検出は、線条体1の高さ方向の動きを線条体感知手段2により感知し、この動きをスライドベアリング4に伝え、チェーン10を掛け渡したスプロケットに回転方向の動きとして変換し、この回転方向の動きを光ファイバ13を掛け渡したターンプーリに伝えることにより、光ファイバ13に張力変化を与え、この光ファイバ13に書き込まれたファイバグレーティング14からの光信号の反射波長を検知することにより行う。検知した光信号を巻き取り機や引き取り機の速度にフィードバックして線条体の位置を一定に保つようにしてもよい。
【効果】 本発明によれば、線条体の位置検出に光ファイバを用いているために電気的ノイズの影響を受けず、また遠隔監視にも適し、かつ経年故障も少ない線条体の位置検出装置及び線条体の位置検出方法を実現することができる。
(もっと読む)
歪センサ用複芯型光ファイバケーブル
【課題】複数本の光ファイバケーブルを敷設するという現在の敷設形態に対応しながら、簡易な構成で構造物との接着性を高め、構造物に適正に支持された光ファイバケーブルにて構造物の歪みなどを正確に測定できるようにする。
【解決手段】光ファイバ芯線2を長さ方向に直交する方向に複数並設し、光ファイバ芯線2それぞれの周囲に配された外皮被覆4を隣り合う同士で連続させ、その隣り合う外皮被覆4同士の連続部5に、長さ方向に沿って溝6を設けた。
(もっと読む)
物体検出装置、および方法
【課題】 自車両の進行先に飛び出す移動物体を検出して運転者に通知すること。
【解決手段】 制御装置106は、カメラ101で撮像された自車両前方の画像に対してエッジ抽出処理を行って、生成した現在エッジ画像と、過去エッジ画像とに基づいて、各画素に含まれるエッジの速度情報を算出する。算出した速度情報に基づいて、画像中の自車両の推定進行先に向かって飛び出してくる移動物体が存在する範囲を特定し、各範囲内に存在する移動物体の種別を判定する。自車両前方に移動物体が存在することが検出された場合には、モニタ107、およびスピーカー108を介して運転者に通知する。
(もっと読む)
管内面形状測定装置
【課題】 管軸に対して装置が傾いた場合でも、その傾き角を計算して管内面の劣化状態を正確に且つ迅速に測定することが可能な管内面形状測定装置を提供する。
【解決手段】 管5の内面6に亘ってレーザビーム8を移動させて管内面6を照射するレーザ光源(光照射手段)4と、このレーザ光源4により照射された管内面6の表面形状を撮像するCCDカメラ(撮像手段)1と、レーザ光源4およびCCDカメラ1を管内面6の矢印A方向(長手方向)に移動さす走行体(移動手段)2と、図示を省略するがCCDカメラ1により撮像した二次元画像と走行体2による位置座標に基づいて管内面6の三次元表面形状を演算する制御部(PC)(演算手段)とを備えて構成される。
(もっと読む)
隙間の測定装置
【課題】厚みのある測定対象の隙間を測定するに際し、簡易な構成の装置にて厚み方向の隙間を精度よく測定できる隙間の測定装置を提供する。
【解決手段】本発明装置は、厚みのある検査対象における隣接面間の隙間を求める隙間の測定装置で、次の構成を有する。検査対象が配されると共に、隣接面間の隙間近傍に切欠を有するベース400。検査対象の一方側で、検査対象の厚み方向に対して傾斜した光軸を有するように配されて、検査対象の画像を取得する撮像手段(カメラ100)。検査対象の他方側に配されて、ベース400の切欠を通して検査対象に対して光を照射する光源200。撮像手段で得た検査対象の画像から隙間の間隔を求める画像処理手段800。
(もっと読む)
消波工の安定性評価方法及びシステム
【課題】消波工全体の変形量を精確に計測できる安全性評価方法及びシステムを提供する。
【解決手段】相互識別可能な測定視標3が付された消波ブロック2の群の積み上げにより消波工1を構築し、消波工1の近傍の不動とみなせる3以上の既知三次元座標の基準位置Qにそれぞれ相互識別可能な基準視標7を固定する。消波工1に臨む異なる撮影位置Oから測定視標3及び基準視標7が含まれる画像群を撮影し、その画像中の各指標像の二次元座標と基準位置7の既知三次元座標とから基準位置7に対する各撮影位置Oの三次元座標及び撮影姿勢と各測定視標3の三次元座標とを画像計測法により計測し、各測定視標3の三次元座標から消波工1の三次元形状Kを算出する。消波工1に対する外力作用前後における消波工1の三次元形状Kから、その外力に対する消波工1の変形量を算出する。
(もっと読む)
センシング用光ケーブル固定装置
【課題】固定治具に把持された光ファイバセンサの張力を容易に調整し、光ファイバセンサの角度を容易に調整することができるようにする。
【解決手段】 構造物の変形を光により検出する光ファイバセンサを固定する光ファイバセンサ固定装置1であって、前記光ファイバセンサを固定するための固定治具5とこの固定治具5を固定するための固定台座7とからなり、この固定台座7に光ファイバセンサの張力を調整するための張力調整手段9を備え、前記固定台座7に前記固定治具5の左右方向および高さ方向の角度を調整する角度調整手段11を備えてなることを特徴とする。
(もっと読む)
光学式マウスにおける埃汚れの低減
【課題】 光学式マウスの動作感知の精度が埃によって低下しないようにする。
【解決手段】 光学式マウス(1)用の改良型モーションセンサであって、このセンサは光学素子(3、7)を有しており、この光学素子は少なくとも1つの導電性の表面を有していることを特徴とする。
(もっと読む)
障害物検出装置及び障害物検出方法
【課題】カメラの撮像方向の変化応じて、時空間画像の検出ラインの位置を補正する。
【解決手段】
車両に搭載され、車両の周囲の所定領域を所定の撮像方向で撮像するカメラ1と、所定領域に予め設定された検出ライン上の画像データの経時的変化に基づいて、車両の周囲の障害物を検出する障害物検出ユニット2とを有し、障害物検出ユニット2は、障害物検出時のカメラ1の撮像方向を取得し、この取得した撮像方向と初期設定時におけるカメラ1の撮像方向とからカメラ1の撮像方向のずれ量を算出し、算出した撮像方向のずれ量に基づいて検出ラインの設定位置を補正する検出ライン補正装置22を有する。
(もっと読む)
構造物の変位測定方法およびこれに用いる変位センサ
【課題】高速道路等の橋桁の3軸方向のズレの変位を監視し、変位が許容値を超えたかどうかの判定を容易に行う。
【解決手段】本発明における第1、第2の変位センサ本体S1、S2は、それぞれZ軸変位センサ用プローブ4を監視対象物である第1、第2の橋桁1a、1bの下面に向けて配設されている。
第1、第2の橋桁1a、1bの対向する端縁部近傍の下面には、それぞれ平板状の第1、第2段差部材17a、17bが取り付けられており、第1の段差部材17aの下面には第1の変位センサ本体S1のZ軸変位センサ用プローブ4の先端部が、第2の段差部材17bの下面には第2の変位センサ本体S2のZ軸変位センサ用プローブ4の先端部がそれぞれ所定の弾力を維持して当接されている。
(もっと読む)
障害物測定方法及び障害物測定装置
【課題】先行車両の車幅等の自車前方の障害物の横幅が未知の場合に、前記の外乱等の影響を極力受けないようにして、単眼カメラの撮影画像から、車間距離等の自車から前方の障害物までの距離を精度よく測定する。
【解決手段】自車1に単眼カメラ2を搭載し、このカメラ2の自車前方の撮影画像の画像処理により、その撮影画像上での先行車両等の自車前方の障害物の基準部の高さ方向の位置を観測位置として検出し、この観測位置を入力とする非線形状態空間モデルの適応フィルタのフィルタリングにより、観測位置及び単眼カメラ2の撮影条件に基いて自車1から障害物までの距離を推定して測定する。
(もっと読む)
成形品外観検査装置及び成形品検査方法
【課題】略方形環状の成形品に対してバリや欠け等の欠陥検査を行うのに適した技術を提供すること。
【解決手段】所定の基準ラインX、Yに沿って、複数箇所で、外周側のエッジ間距離Y(n)、X(n)を取得し、これらと予め設定された基準値Y(s)、X(s)とを比較している。そして、外周側のエッジ間距離Y(n)、X(n)が、外周側の基準値Y(s)、X(s)の半分であるとかどうかを判定し、その判定結果に基づいて成形品1が部分的に途切れているか否かを判定しているため、成形品1の途切れによる形状不良について、より適切に欠陥検査を行うことができる。
(もっと読む)
物体検出装置
【課題】 検出対象となる物体の形状や動きに依存することなく正確に物体の位置を検出する。
【解決手段】 車両20に搭載され、車両20の周囲を撮像するカメラ11と、調査点を中心とし、車両と、実空間における調査点との相対距離に応じて面積が決められた調査領域を画像上に設定し、設定された調査領域を、前記調査点を通過する分割線により2以上の領域に分割し、分割された各領域内の特徴量をそれぞれ算出し、算出したこの特徴量に基づいて、画像上の上部に位置する上部領域に物体が存在し、画像上の下部に位置する下部領域に物体が存在していないと判定した場合に、中心点までの実空間における距離を算出して、物体の位置を求める画像演算処理部13とを備えることで実現する。
(もっと読む)
画像生成方法及び装置
【課題】 現実世界又はその映像に位置合わせされたCG画像を生成する画像生成方法において、任意の現実物体について、CG画像を重畳した状態としない状態とを観察者が容易に観察可能とすること。
【解決手段】 CGを重畳しないCGマスク領域を設定しておき、CGマスク領域に含まれる現実物体にはCGを重畳しないようにする。任意の現実物体について選択的にCGが重畳された状態と重畳されない状態とを観察することが可能になる。
(もっと読む)
鉄道監視システム
第1に、光ファイバを備える鉄道監視システムである。光ファイバの第1の部分は、レールの軌道の組の1つに取り付け可能であり、ファイバの第1の部分の特徴は、ファイバの第1の部分が取り付けられる前述の1つの軌道の特性の変化に応じて可変である点である。システムはまた、光信号をファイバの中に放射するためのファイバに接続された光信号放射器を含み、ファイバは少なくとも第1の変更された光信号を生成し、この信号はファイバの一部の特性の変化に関係する情報を含む。システムは更に、第1変更された光信号に含まれる情報に基づいた、1つの軌道の特性の変化を確認するために、ファイバに接続されて第1の変更された光信号を受信して解析するための光信号アナライザを含む。 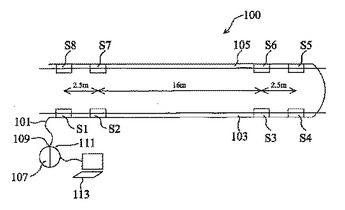 (もっと読む)
(もっと読む)
自動車のフード状部とその他の自動車ボディとの間の隙間寸法およびオフセットの少なくとも一方を調整するための方法および装置
本発明は、自動車の可動のフード状部(2)と該自動車の残りのボディ(3)との間の隙間寸法およびオフセットの少なくとも一方を調整するための方法および装置(1)に関する。フード状部(2)はまず粗調整された組付け位置で前記ボディ(3)に対してできるだけ同一平面となるようはめ込まれかつ保持される。さらに前記フード状部は、隙間寸法および/またはオフセットについてのあらかじめ定義された値ができるだけ正確に守られるように微調整される。隙間寸法および/またはオフセットをできるだけ非接触で、できるだけ簡単かつ迅速に、かつ柔軟に調整することができるようするために、微調整のために、フード状部(2)と残りのボディ(3)との間の隙間寸法および/またはオフセットについての実測値(21_ist)が光学的に検知される。隙間寸法および/またはオフセットについての検知された実測値(21_ist)とあらかじめ設定された目標値(21_soll)に従って、少なくとも1つのアクチュエータ(12)のための制御信号(24)が求められる。  (もっと読む)
(もっと読む)
301 - 320 / 320
[ Back to top ]