
Fターム[2F065PP01]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 検出器の支持、保持関連 (1,622)
Fターム[2F065PP01]の下位に属するFターム
Fターム[2F065PP01]に分類される特許
201 - 220 / 320
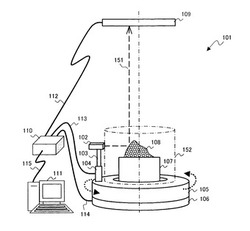
測定装置
【課題】
従来技術によるモアレ法は、モアレパターンから等高線を求めるために複雑な演算を行う必要があった。さらに、高低差のある物体の等高線を一度に求めるため、物体の高低差によって誤差が生じるという問題があった。
【解決手段】
本発明に係る測定装置は、第1の方向に光を送光する送光部と、前記第1の方向と略直交する軸を中心に被測定物と前記送光部とを相対的に回転させる回転部と、前記被測定物で反射した前記光を検出する検出部と、前記検出部の検出結果に基づいて、前記被測定物の形状を測定する形状測定部とを設けた。
(もっと読む)
光断層画像化装置

【課題】光断層画像化装置において、高速に高分解能の断層画像を取得する。
【解決手段】光源ユニット10から、波長が1295nm〜1345nm 内で間欠的に繰り返し掃引される光Laと、波長が1255nm〜1305nm 内で間欠的に繰り返し掃引される光Lbとが同時に射出される。どちらかの光の波長が1290nm〜1310nmの間である場合には他方の光は射出されない。光分割手段3は光La、Lbをそれぞれ測定光L1a、L1bと参照光L2a、L2bとに分割する。波長分割手段5aは、測定光L1a、L1bが測定対象Sに照射されたときの反射光L3a、L3bを波長分割する。波長分割手段5bは、参照光L2a、L2bを波長分割する。合分波手段6a、6bは反射光L3a、L3bと参照光L2a、L2bとを各光ごとにそれぞれ合波する。干渉光検出手段40a、40bは上記合波により生ずる干渉光L4a、L4bを干渉信号として各光ごとに検出する。
(もっと読む)
光断層画像化装置
【課題】 光断層画像化装置において、光プローブの揺れによる干渉信号レベルの揺らぎを防止する。
【解決手段】 測定対象内に挿入される光ファイバ12を収容した光プローブ10を、光断層画像化装置本体1Aに接続してなる光断層画像化装置1において、光プローブ10の測定対象H外に延びる部分の少なくとも一部を、すくなくとも光断層画像取得時に固定する固定手段5Aを備える。
(もっと読む)
光断層画像化装置
【課題】光断層画像化装置において、高速に高分解能の断層画像を取得する。
【解決手段】光源ユニット10から、波長帯域1.0μm〜1.5μm内で、波長が繰り返し掃引される光Laと、波長帯域0.6μm〜1.1μm内で、波長が繰り返し掃引される光Lbとを同時に射出する。分波手段3は光La、Lbをそれぞれ測定光L1a、L1bと参照光L2a、L2bとに分割する。合波手段5は、測定光L1a、L1bが測定対象Sに照射されたときの反射光L3a、L3bと参照光L2a、L2bとを合波する。波長分割手段30は、このとき生じた干渉光L4aと干渉光L4bの波長帯域を0.9μm以下、0.9μm〜1.2μm以下、1.2μmより長波長の3つの波長帯域に分割して干渉信号を取得する。光Laと光Lbとで波長が重複している重複波長帯域を含む0.9μm〜1.2μm以下の波長帯域においては、光源10aまたは光源10bの一方の光源のみから光が射出される。
(もっと読む)
光ファイバ式ひずみゲージ
【課題】簡単且つ低コストな構成で温度補償の問題を解決し得る上に、測定対象物に溶接等することによりその測定対象物に加わる引張力、及び曲げ力等を高精度に検出し得る光ファイバ式ひずみゲージを提供する。
【解決手段】光ファイバ式ひずみゲージ100は、空隙部13が形成されたゲージベース10と、連続的に形成された第1溝部14A、14B及び第2溝部15A、15Bと、この両溝部に固定される光ファイバ11と、光ファイバに形成されたFBG111と、ゲージベース10と測定対象物とを固定する、両溝部と直交する方向に延びる第1固着部12A1、12B1と、両溝部と平行に延びる第2固着部12A2、12B2とにより形成されており、ゲージベース10を、2方向に固定できるので、測定対象物に強固に固定して面外に変形することを防止することが可能となり、曲げ力等によって発生する測定対象物のひずみを検出することができる。
(もっと読む)
ガラスシートの歪を測定するためのゲージ
1つ以上の平基板の歪及び/または寸法変化を測定する座標測定装置が開示されている。一態様において、1つ以上の平基板の歪及び/または寸法変化を測定するための座標測定装置は、平基板を受け取るための形状につくられた上面を有する定盤を含む集成ベース及び、それぞれの画像取込デバイスが、視野を有し、定盤の上面の少なくとも一部分と平行な平面に、上から位置合せされて、配置されている、画像取込デバイスの多次元アレイを備える。複数の画像取込デバイスは、それぞれの画像取込デバイスの視野が定盤の上面の少なくとも一部分を捕捉できるように、多次元アレイの平面に垂直な方位に向けられる。さらに、複数の画像取込デバイスのそれぞれは多次元アレイの平面内に定められた既定の座標に選択的に配置することができる。  (もっと読む)
(もっと読む)
地上モバイルマッピングデータからオブジェクトを検出する方法及び装置
本発明は、地上モバイルマッピングデータからオブジェクトを検出する方法に関する。この場合、地上モバイルマッピングデータは、道路を走行する走行方向を有する地上モバイルマッピング車両により取り込まれており、モバイルマッピングデータは、レーザスキャナデータ、少なくとも1つのカメラにより取得されるソース画像、並びに車両の位置データ及び方位データを含み、レーザスキャナデータは、各々が関連する位置データ及び方位データを有するレーザポイントを含み、各ソース画像は、関連する位置データ及び方位データを含む。方法は、車両の位置及び方位を検索することと、注目領域に対応するレーザポイントを取得するため、車両の位置及び方位に依存してレーザスキャナデータをフィルタリングすることと、車両の位置及び方位と関連するソース画像を検索することと、認識マスクを生成するため、注目領域に対応するレーザポイントをソース画像の画像座標にマッピングすることと、注目領域内の可能なオブジェクトを表す候補3D画像を取得するため、認識マスク及びソース画像を組み合わせることと、候補3D画像からオブジェクトグループを検出することとを含むことを特徴とする。画像認識及びレーザスキャナ認識を組み合わせることにより、検出率は非常に高い割合まで増加可能であり、そのため歩行者の労力を大幅に減少する。更に、レーザデータにおいて注目領域を生成することにより、画像内のオブジェクトを検出するために必要な処理能力及び/又は処理時間を大幅に減少できる。  (もっと読む)
(もっと読む)
物体検出装置および物体検出方法
【課題】単一の物体を複数の小物体とみなしてしまうといった誤検出を抑制し、物体の検出精度の向上を図る。
【解決手段】フィルタ部3は、距離画像を構成する距離データのそれぞれの信頼性を評価し、この信頼性に基づいて、距離データから有効距離データと無効距離データとを抽出する。物体検出部4は、距離画像における有効距離データのヒストグラムに基づいて、検出対象となる物体を検出する。グループ検出部5は、距離画像上において、有効距離データが存在する領域を分離条件とした上で、互いに隣接した無効距離データをグループ化する。グループチェック部6は、グループ化されたグループの中から、個々のグループ内における無効距離データの統計結果を用いて、同一物体の一部分とみなすことができる同一物体グループを抽出する。物体修正部7は、複数の物体の間に同一物体グループが介在する場合、これらを1つの物体とみなす。
(もっと読む)
物体検出装置および物体検出方法
【課題】背の低い物体の背後に背の高い物体が写っている状況でも、双方の物体を精度よく検出する。
【解決手段】距離分布生成部4は、距離画像上に設定された複数の区分のそれぞれについて、その区分内に存在する距離値のヒストグラムを生成するとともに、区分内の距離値を代表する距離代表値として、所定のしきい値以上の出現頻度を有する距離値を、同一区分内での複数選択を許容しつつ、区分毎に特定する。物体検出部5は、区分と距離とによって規定される処理空間において、互いに隣接した距離代表値を同一物体とみなしてグループ化することによって、検出対象となる物体を検出する。
(もっと読む)
描画装置およびアライメント方法
【課題】アライメントカメラに高性能な駆動機構を使用することなく、光照射部とアライメントカメラとの位置関係が変化した場合であっても、基板上の正確な位置に描画を行うことができるパターン描画装置およびアライメント方法を提供する。
【解決手段】パターン描画装置1は、光学ヘッド32から照射されるパルス光に対する各アライメントカメラ41〜44の相対位置のずれ量を検出し、そのずれ量に基づいて基板9のアライメント量および基板9の描画開始位置を補正する。このため、光学ヘッド32から照射されるパルス光と各アライメントカメラ41〜44との位置関係が変化した場合であっても、その変化分を補正しつつ描画処理を行うことができる。したがって、パターン描画装置1は、基板9上の正確な位置に描画を行うことができる。
(もっと読む)
照明装置、及びその照明装置を用いたマスク検査装置
【課題】光強度分布が均一な、波長200nm以下の光を照射する光を出射することができる照明装置、及びその均一な光強度分布を有する光を用いた高感度のマスク検査装置を提供する。
【解決手段】波長200nm以下の光源111と、光源111からの光が入射され、光が伝播する矩形の光導波部113aと、光導波部113aを、光導波部113aの対向する側面から挟持した1組のクラッド部113bとから構成された光導波路113とを有する照明装置であって、クラッド部113bは、光導波部113aと当接する面と垂直な2組の側面を有し、側面は、光導波部113aのクラッド部113bと当接する面と垂直な側面と同一の平面上に配設され、光導波部113aとクラッド部113bはフッ化物によって作成されることを特徴とする照明装置。
(もっと読む)
物体傾き検出装置
【課題】
撮像画像中に天井面や上り坂における道路標示等が撮像されている場合にそれらを的確に検出可能な物体傾き検出装置を提供する。
【解決手段】物体傾き検出装置1は、自車両前方を撮像して画素ごとに輝度値pnijを有する一対の画像を出力する撮像手段2と、撮像された一対の画像の画素の輝度値pnijに基づいて少なくとも一方の画像Tの各画素について実空間における距離Lijを算出する画像処理手段6と、距離Lijの情報に基づいて、道路面より上方に存在するとともに同一立体物を撮像したと見なせる画素をグループ化することで一方の画像T上に立体物Sを検出する立体物検出手段93と、検出された立体物Sに該当する距離データLijの変化量を計算することで、撮像手段2の撮像方向に対する検出された立体物Sの高さ方向の傾きeを算出する傾き算出手段94とを備える。
(もっと読む)
バギングフィルム用光ファイバ貫通シール構造
【課題】バギング時にも光ファイバに圧力が掛からず、光の損失が発生しないバギングフィルム用光ファイバ貫通シール構造の提供。
【解決手段】バギングフィルムの開口縁部に気密にシールされたグロメット状の真空保持部材の貫通孔に気密にシールされて挿入され、貫通孔を通る光ファイバを封止するシール部材とを備えたバギングフィルム用光ファイバ貫通シール構造。光ファイバは、貫通孔に充填されたシール部材に貫入されても、シール部材に通してから貫通孔に圧入係合、テーパー係合あるいはねじ係合により挿入しても良い。光ファイバは、シール部材中でらせん状にできる。
(もっと読む)
変位量検出装置
【課題】いわゆる回転円盤とFBG方式の光ファイバセンサを有して伸縮計等の変位量検出装置を構成することにより、広域にわたる同時計測の場合であっても、例えば敷設する伝送ケーブル本数を少なくでき、伝送最大距離をも容易に延長することができ、敷設コストを安価にして構成できる変位量検出装置の提供を目的とする。
【解決手段】一端が揺動する被検出部材に接続され、他端側は回転円盤外周面に巻回され、被検出部材の揺動を円盤の回転量に変換するひも状回転変換部材と、軸心部に接続取り付けされ円盤の回転量を軸心方向への移動に変換する移動変換部材と、一端側が移動変換部材に取り付けられ、他端側は基部として固定された、移動変換部材長手方向と略直角方向に延出して設置された揺動検出部材とを備え、揺動検出部材には表裏面に曲げひずみを検出するFBG光ファイバセンサが各々設けられたことを特徴とする。
(もっと読む)
距離測定装置
【課題】車の前方に存在する障害物の車からの距離と車に対する方位とを短時間で測定する距離測定装置を提供する。
【解決手段】車100の前側両端に設けられた距離センサ101と102はそれぞれ光源と受光素子を含んでおり、それぞれ「片側だけ拡大された光ビーム」103と104を例えば1ミリ秒の時間間隔で交互に放射し、対象物106からの反射光を受光して対象物106までの距離を独立に測定する。「片側だけ拡大された光ビーム」103と104の重複領域105の中では、二つの距離センサ101と102の間隔を基線長とする三角測距によって、対象物106の車100からの距離と車100に対する方位とが測定可能である。「片側だけ拡大された光ビーム」103と104の進行方向の長さは約50m程度で、その重複領域105の進行方向に垂直な幅は車100の幅よりも少し広い2m程度である。
(もっと読む)
欠陥検査装置及び欠陥検査方法
【課題】コストの増大を抑えて高速に欠陥検査を行うことができる欠陥検査装置及び欠陥検査方法を提供する。
【解決手段】画像取込部21は2次元の画像情報を生成する。DWT処理部22は、離散ウェーブレット変換により、画像サイズが縮小された縮小画像情報を生成する。欠陥検出部25は、縮小画像情報を用いて検査対象物上の欠陥を抽出する。元の画像情報に対応した画像よりも画像サイズを縮小する一方で、周波数成分を維持した縮小画像情報を用いて欠陥を抽出するので、コストの増大を抑えて高速に欠陥検査を行うことができる。
(もっと読む)
無限軌道帯用履板の計測システムおよび計測方法
【課題】照明装置や暗室を必要とせず、測定誤差を小さくして高精度に計測することが可能な履板の計測システムおよび計測方法の提供。
【解決手段】履板1の主ラグ(13)の先端面(13f)および副ラグ(14)の先端面(14f)が搬送コンベア(5)に接触して搬送されるように構成されており、収束性の高い光を照射する投光側(21)とその光を受光する受光側(22)とが対となって搬送コンベア(5)上に設けられており、履板(1)が通過する際に履板(1)の被計測領域(11)により遮られる位置を投光側(21)から照射される光の軸が経由するように設定されており、投光側(21)と受光側(22)とが斜めに向かい合って配置されている。
(もっと読む)
光ファイバ埋め込み樹脂製構造体
【課題】樹脂のひずみを測定する手段として光ファイバを用いる際に、光ファイバが樹脂から抜け出ることを防止する。
【解決手段】まず熱可塑性樹脂で構造体を成形する。そして、機械加工等により製品形状を製作する。次に、コアとクラッドからなる光ファイバにおいて、コアにスリットを2個以上加工しておき、これらのスリットの軸方向両側にクラッドの周囲に部材を固定した光ファイバを樹脂製構造体表面に配置する。光ファイバに固定した部材を配置するくぼみはあらかじめ前記構造体に機械加工等により設けておく。その後、構造体と同種類の熱可塑性樹脂で光ファイバを覆う。そして、加熱,加圧を行って、製品形状の熱可塑性樹脂と光ファイバを覆った熱可塑性樹脂を溶融させて一体化させる。このような構成にすることにより、光ファイバが熱可塑性樹脂から抜け出ることがなくなり、構造体に負荷されるひずみを安定して計測することができる。
(もっと読む)
鉄道車両の出来形寸法の計測方法および計測システム、並びにその計測方法に用いられるターゲット、並びにその計測システムを具えた鉄道車両の出来形寸法検査システム
【課題】計測作業の効率を高め、人的誤差の発生を防止し、レールレベルからの台枠高さや屋根高さ計測における真値を計測可能にする。
【解決手段】レールRLを挟むように配置した少なくとも四台の一部撮影用デジタルカメラ1〜4をそれぞれ固定し、レール上の所定位置に計測対象の鉄道車両RVを配置した際および、その後鉄道車両をレール上で所定距離移動させる毎に、レール上の車両の一部を、デジタルカメラで車両の長手方向の斜め方向から撮影して、車両の複数箇所に設けたターゲットを撮像し、各ターゲットの画像データを基に画像処理および演算処理をすることによって、車両全体に設けた複数のターゲットの各々の撮影位置での3次元座標値を算出し、各ターゲットの撮影位置での3次元座標値と、車両の移動距離との組み合わせから車両の出来形寸法を算出する、鉄道車両用出来形寸法計測方法。
(もっと読む)
改善された光学測距カメラ
【課題】一つの情景中の全ての画素から実質的に同時に深度情報を得る、改善された測距カメラを提供する。
【解決手段】情景中の被写体までの距離を示す画像を生成するための装置であって、第1変調関数を有し、情景に向かって放射波を向きづける変調された放射波源と、上記情景から反射され、第2変調関数により変調された放射波を検知し、上記検知され変調された放射波に応じて、上記情景の領域までの距離に対応する信号を発生する第1検知器と、上記情景から反射され、上記第2変調関数により変調されない放射波を検知するとともに、上記検知された放射波に応じて上記情景の領域から反射された光の強度に応じた信号を発生する、上記第1検知器とボアサイトされた第2検知器と、上記第1および第2検知器から信号を受信するとともに、上記装置からの被写体の距離を示す強度分布を有する、上記信号に基づいて画像を形成するプロセッサと、を含む。
(もっと読む)
201 - 220 / 320
[ Back to top ]