
Fターム[2F065RR09]の内容
光学的手段による測長装置 (194,290) | 比較基準データの作成、設定 (2,769) | 比較相手 (2,648) | 正常品のデータ (1,052) | 測定後記憶するもの (609)
Fターム[2F065RR09]に分類される特許
1 - 20 / 609
検査システム及びレシピ設定方法
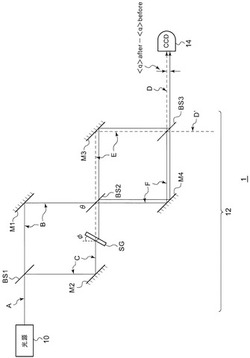
弱測定を利用した信号の増幅装置
【課題】微弱信号を増幅可能な増幅装置を提供する。
【解決手段】増幅装置は、被測定系の観測量^Aを測定する際に、測定器と、初期状態が事前選択された被測定系を相互作用させ、次に被測定系の終状態を事後選択し、測定器の波動関数ξ(p)を用いて物理量の測定を行う。被測定系の量子状態の事前選択状態、事後選択状態それぞれのベクトルを|i>、|f>とするとき、式(1)の弱値AWが既知であり、AW=<f|^A|i>/<f|i>…(1)、測定器と被測定系の相互作用ハミルトニアンHが、測定器の運動量演算子^pおよび結合係数g(ただしg>0)を用いて式(2)で与えられ、H=g・δ(t−t0)・^A・^p…(2)、^A2=1のときに、測定器は、波動関数ξ(p)が運動量表示で実質的に式(3)となる。 (もっと読む)
(もっと読む)
雲の含水率を決定する方法

【課題】雲の含水率を決定する方法を提供する。
【解決手段】雲の含水率は、雲の水滴サイズ分布から導出される。雲の水滴のサイズ分布を決定する方法は、雲の深さを電磁放射ビームによりサンプリングすることと、雲から戻った電磁放射のエコー強度を検出器により測定することと、測定エコー強度から測定光減衰係数を決定することと、測定エコー強度から測定後方散乱係数を決定することと、測定光減衰係数及び測定後方散乱係数からライダー比を決定することと、ライダー比から水滴の形状パラメータ(μ)及びメジアン体積径(DMVD)を含む値ペアを決定することと、値ペア(μ,DMVD)を使用して水滴のサイズ分布を決定することとを含む。
(もっと読む)
変位検出警報システム
【課題】風や反射光などの外乱の影響による誤検出を低減させ正確な変位量を検出することができる、安価で高精度な変位検出警報システムを提供すること。
【解決手段】再帰反射材を用いた1枚のターゲットに対して、異なる方向から複数の変位検出装置によって撮影することで、昼夜問わず外乱による誤検出を低減させることができる。さらに、変位検出装置で撮影した画像データと過去の計測データと気象データを統合することにより、気温の変化によるターゲットもしくは変位検出装置の変形や、両方の変形、降雨や風による変位の誤検出が発生しやすい場合でも、高確率で正しい判定が可能になる。また、各変位検出装置でデータを分散して保存することにより、変位検出装置が最後の1台になっても、計測を継続することが可能である。
(もっと読む)
ネイルプリント装置及び印刷制御方法
【課題】複数回印刷ヘッドを走査して爪部に印刷を施す場合に、n回目の走査終了後n+1回目の走査までの間に指が動いてしまった場合でも、走査ごとの画像のずれを防いで高品質の印刷を行うことのできるネイルプリント装置及び印刷制御方法を提供する。
【解決手段】爪部Tを複数の領域に分けて複数回の走査により1つのデザイン画像を印刷する場合に、各回の走査開始前(S3)に爪部Tの位置情報を取得する(S2)とともに、n+1回目の走査を開始する前に、n回目の走査開始前の爪部Tの位置情報とn+1回目の走査開始前の爪部Tの位置情報とを比較して(S8)爪部Tの位置変化を検出して(S9)、n+1回目の走査開始前に爪部Tの位置変化が検出されたときは、爪部Tの位置変化に応じて、n+1回目の走査を行う際の印刷開始位置を補正し(S10)、この補正後の印刷開始位置から、次の印刷を開始するように印刷制御する(S9)。
(もっと読む)
移動体及び移動面検出システム
【課題】照度の低い環境において、コントラストが低い移動面上を移動する移動体の位置及び姿勢、並びにその移動面の形状を検出する。
【解決手段】移動体及び移動面検出システム1は、移動体3と、移動体3上に配置された発光部4と、移動体3を俯瞰する位置に設けられたステレオカメラ5及び測距センサ6と、ステレオカメラ5及び測距センサ6の出力を処理する処理部7と、処理部7の出力を表示する表示部8とを備える。ステレオカメラ5は、発光部4のステレオ画像を撮像する。測距センサ6は、移動面に光を出射し、移動面で反射されて戻ってくる光の飛行時間に基づいて移動面を測距する。処理部7は、ステレオカメラ5が撮像したステレオ画像に基づいて移動体3の位置及び姿勢を検出するとともに、測距センサ6の出力に基づいて移動面の形状を検出し、移動体3の位置及び姿勢と、移動面の形状とを表示部8に表示する。
(もっと読む)
3次元計測装置およびその方法
【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
(もっと読む)
FPDモジュール組立装置及び表示基板の搬送方法
【課題】表示基板に設けられたアライメントマークを撮像範囲の適正位置に出現させて、表示基板の搬送を安定化させることができるFPDモジュール組立装置および表示基板の搬送方法を提供する。
【解決手段】FPDモジュール組立装置は、複数の処理ユニットと、搬送部と、カメラと、制御部とを備えている。制御部は、表示基板の生産ロットが変更されると、カメラによって撮像されたアライメントマークの座標を検出し、検出回数が所定の回数になると、検出した複数の座標の平均及び標準偏差σを算出する。そして、複数の座標から−1.5σ<P<1.5σを満たす座標を抽出し、抽出した座標の平均に基づいて搬送部による表示基板の受取位置を補正する。
(もっと読む)
検出装置、検出方法、インプリント装置及びデバイス製造方法
【課題】 異なる2つの物体の回転ずれを計測する際に、従来と比較して計測時間の短い検出装置、検出方法、インプリント装置及びデバイス製造方法を提供すること。
【解決手段】 異なる2つの物体にそれぞれ形成された格子マークが重なることによって生じる干渉縞を用いて、前記2つの物体の相対的な回転ずれ量を求める検出装置において、前記干渉縞を検出する検出器と、該検出器で検出された前記干渉縞の傾きから前記異なる2つの物体の相対的な回転ずれ量を求める演算部と、を有することを特徴とする検出装置。
(もっと読む)
錠剤検査装置及びPTP包装機
【課題】錠剤の変更にも柔軟かつ円滑に対応することができ、しかも検査精度の飛躍的な向上を図ることのできる錠剤検査装置及びPTP包装機を提供する。
【解決手段】錠剤検査装置21は、容器フィルムのポケット部に収容された錠剤に対し光を照射可能な照明装置22と、照明された範囲内の錠剤を撮像可能なカメラ23と、カメラ23から出力される画像信号を処理する画像処理装置24とを備える。画像処理装置24は、画像データに基づき錠剤の輪郭を抽出し、輪郭上における第1の所定点及び第2の所定点の接線の向き情報を演算するとともに、第1及び第2の所定点で挟まれた第3の所定点の接線の向き情報を求め、第3の所定点の接線の向き情報が、第1の所定点の接線の向き情報及び第2の所定点の接線の向き情報に基づく許容範囲を逸脱している場合に、当該第3の所定点に関し不良候補として判定する。
(もっと読む)
移動量測定装置および方法
【課題】累積的な移動量および1回測定当たりの移動量の測定精度が共に良好な移動量測定装置。
【解決手段】画像を入力する手段と、入力画像を記憶する手段と、記憶された画像の一部をテンプレート画像として抜き出す手段と、入力画像とテンプレート画像との相関計算によりパターンマッチングをする手段と、パターンマッチングの結果を用いて被測定物の移動量を算出する手段と、を備え、移動量を算出する手段は、固定されたテンプレート画像を用いたパターンマッチングにより計算された移動量と、逐次更新されたテンプレート画像を用いたパターンマッチングにより計算された移動量とを比較し、移動量の差が一定値未満の場合は固定されたテンプレート画像に基づく移動量を選択し、移動量の差が一定値以上の場合は両方の移動量を用いて補正計算することによって、被測定物の移動量を算出する移動量測定装置。
(もっと読む)
移動量測定装置および移動量測定方法
【課題】移動と停止を繰り返すような動きをする移動体の移動量を測定する場合であっても、高精度に測定する。
【解決手段】測定物の画像を入力する手段と、測定物のテンプレートを取得する手段と、前記取得されたテンプレートを保存する手段と、前記測定物の画像と前記保存されたテンプレートから前記測定物の移動量を算出する手段と、測定物が停止しているかを判定する手段と、を備え、前記保存されたテンプレートは、前記測定物が停止しているかを判定する手段により停止していると判定された場合に保存されたテンプレートを更新することを特徴とする。
(もっと読む)
観察方法、露光装置、及びデバイス製造方法
【課題】液浸法で露光を行う露光装置の液体に接する部分に異常があるかどうかを効率的に判定する。
【解決手段】露光光ELで投影光学系PLと液体1とを介して基板Pを露光する露光方法において、液体1に接する接液部を光学的に観察し、得られる第1画像データを記憶する第1工程と、接液部の液体1との接触後、例えば液浸露光後に接液部を光学的に観察して第2画像データを得る第2工程と、第1画像データと第2画像データとを比較して、その観察対象部の異常の有無を判定する第3工程とを有する。
(もっと読む)
計測装置、欠陥検査装置及び計測方法
【課題】全体形状と局所的形状とを両方とも精度良く計測する。
【解決手段】プロジェクタ1は物体M上に映像を投影する。撮像装置2はプロジェクタ1によって物体M上に投影された映像を、プロジェクタ1とは異なる角度から撮像する。ステージ3及びステージ駆動装置4は、物体Mとプロジェクタ1及び撮像装置2との間の所定方向の相対走査を実行する。記憶部6には、ステージ3及びステージ駆動装置4による相対走査を実行しつつ、プロジェクタ1によりY軸方向に延びるスリット像を基準となる物体M上に投影させたときに撮像装置2によって撮像される動画像も記憶されている。制御部9は、ステージ3及びステージ駆動装置4による相対走査を実行しつつプロジェクタ1により記憶部6に記憶された動画像を計測対象の物体M上に投影させるとともに、撮像装置2により物体M上に投影された動画像を撮像させる。
(もっと読む)
グラスランの断面形状評価方法
【課題】グラスランにおける断面形状の各部の寸法の評価をインラインにて定量的に行える断面形状評価方法を提供する。
【解決手段】押出成形後に所定長さに裁断された断面略チャンネル状のグラスラン1の切断面をCCDカメラ28で撮像し、断面形状の良否を画像解析装置33により評価する。撮像する工程のほか、側壁部とリップのそれぞれの長さと側壁部に対するリップ先端までの距離を計測してその良否判定を行う工程と、底壁部の幅寸法を計測してその良否判定を行う工程と、各側壁部と底壁部との相対位置関係として底壁部と各側壁部とのなす角度を計測してその良否判定を行う工程と、を含んでいる。
(もっと読む)
散乱計測定の改良システムおよび応用
【課題】回折構造体の測定パラメータモデルを利用する分光散乱システムおよび方法を提供する。
【解決手段】モデルの固有値を事前計算し、記憶し、ある共通の特性をもつ他の構造体に対して後に再利用する。1つ以上のパラメータの値を求めるために用いられる散乱データは、下敷フィルム特性に対して感度が低くなる波長におけるデータだけに制限することが可能である。代表的な構造体をスラブ200’(i)のスタックにスライスし、各スラブの近似を行うため四角形ブロック210,212,214,216,218のアレイを作成することによって三次元グレーティングに対するモデルを構築することが可能となる。
(もっと読む)
計測装置
【課題】装置の高コスト化を抑えながら、被検面の形状を高精度に計測することができる技術を提供する。
【解決手段】被検物を保持する保持面を含む保持部と、被検面と被検面の形状を計測するための基準となる基準位置との間の距離を計測する距離計測部と、基準位置が被検面に沿うように距離計測部を駆動する駆動部と、駆動部によって駆動される距離計測部の基準位置を測定する位置測定部と、距離計測部によって計測された被検面と基準位置との間の距離と位置測定部によって測定された基準位置とに基づいて被検面の形状を算出する処理部と、を有し、位置測定部は、距離計測部に配置されて互いに異なる測定軸を有するレーザ干渉計と、レーザ干渉計のそれぞれからの光をそれぞれ反射する基準ミラーとを含み、レーザ干渉計の原点と基準ミラーとの間の距離を測定することで基準位置を測定し、基準ミラーの法線が保持面を含む面に交差するように配置される。
(もっと読む)
画像処理方法、プログラム、および画像処理装置
【課題】計測時の手間を低減する。
【解決手段】CPU34cは、ブレードを撮像した動画像を構成する第1のブレード画像からテンプレート画像を抽出する。CPU34cは、第1のブレード画像とテンプレート画像とを比較し、第1のブレード画像の中から、テンプレート画像におけるブレードの姿勢と一致する姿勢のブレードを含む第2のブレード画像を抽出する。CPU34cは、予め算出された3次元形状を有する物体の画像をテンプレート画像に重畳した第1の画像を表示部に表示し、テンプレート画像におけるブレードの姿勢に一致するように、第1の画像における物体の姿勢を制御する。CPU34cは、この物体の画像を第2のブレード画像に重畳した第2の画像を表示部に表示する。CPU34cは、第2の画像における物体上の計測点の3次元座標を算出し、算出した3次元座標に基づいて、物体のサイズを算出する。
(もっと読む)
基板処理装置および基板処理の終了時点を検出する方法
【課題】基板表面に薄膜を形成する基板処理で、処理の進行具合をリアルタイムで把握して処理の終了時点を精度よく検出できる方法を提供すること。
【解決手段】基板1上に絶縁膜2を形成する基板処理装置10であって、絶縁膜2を波長可変単色光sで照射し、絶縁膜2および基板1からの各反射光を干渉させる干渉光発生手段12と、所望膜厚での干渉光強度Iが極小になるように単色光sの基準波長λ0を設定する基準波長設定部28と、基準波長を挟む2波長(λ1、λ2)間で単色光sを波長変調する変調部26と、これに応じた干渉光強度Iを検出する干渉光検出器18と、絶縁膜2が所望膜厚に達する直前から所望膜厚に達するまでの干渉光強度Iの変化に基づいて、最大波長(λ2)時と最小波長(λ1)時の干渉光強度の差分ΔIが零または所定値になる時点を基板処理の終了時点として検出する終了時点検出手段20とを備える。
(もっと読む)
検出装置
【課題】確実に、かつ、高速に、合焦位置の検出を行う。
【解決手段】ラインセンサ25を構成するラインピクセル上の合焦時の光点像(レーザスポットS1)では、レーザ光の光量が絞られる調整制御が行われ、合焦ピクセルから離れた位置となる非合焦時の光点像(レーザスポットS2)では、レーザ光の光量が増加される調整制御が行われるように、あらかじめ定められたテーブルデータに従ったフィードフォワード制御が行われることで、確実に、かつ、高速に、合焦位置の検出を行うことができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
1 - 20 / 609
[ Back to top ]