
Fターム[2F069GG04]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 非接触式 (642)
Fターム[2F069GG04]に分類される特許
141 - 160 / 642
回転位置検出用プレートおよびこれを用いたクランクシャフトの回転位置検出装置
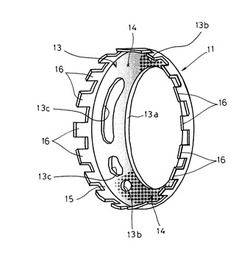
【課題】重量の増加を抑えながら剛性が向上する回転位置検出用プレートを提供する。
【解決手段】クランクシャフト5への取付部14を含む本体部13と、クランクシャフトの回転位置を検出するための検出部16とを備え、クランクシャフトに取り付けられてなる回転位置検出用のシグナルプレート11は、本体部13の取付部14および取付部と反対側の面が曲面をもって椀状に形成されている。
(もっと読む)
情報処理装置、情報処理方法、情報処理プログラム、間仕切りパネル

【課題】
本発明では、他の情報処理装置との位置関係を把握した上で、所定の位置関係にある他の情報処理装置と、高度なセキュリティ機能を有する情報処理システムを自立的に構築する情報処理装置等を提供することを目的とする。
【解決手段】
本発明に係る情報処理装置は、距離計測用センサを用いて計測した距離に基づいて、当該情報処理装置の位置を基準とした他の情報処理装置の位置を検出する位置検出手段と、位置検出手段による検出結果に基づいて、当該情報処理装置と他の情報処理装置とが所定の位置関係にあるか否かを判定する位置判定手段と、対象物検出用センサを用いて、対象物を検出する対象物検出手段と、位置判定手段により所定の位置関係にあると判定された他の情報処理装置に対して、対象物検出手段により検出された対象物を識別する識別情報を通知する情報通知手段と、を有することを特徴とする。
(もっと読む)
速度検出装置および位置検出装置および位置決め装置
【課題】安価で簡易な構成によりスライダの位置検出を安定して行うことができるとともに、設計の自由度の高い位置決め装置を実現する。
【解決手段】X軸方向に位置制御されるスライダ1と、このスライダ1と対向する面に磁極の歯が形成されてスライダ1と平面モータを構成するプラテン10とを有するとともに、
スライダ1のX軸方向の位置に応じた信号を出力するレゾルバ30と、スライダ1のX軸方向の加速度を検出する加速度センサ31とを備えた位置検出装置300を備え、
位置検出装置300がレゾルバ30と加速度センサ31の出力に基づいてスライダ1の位置を求めることを特徴とする位置決め装置。
(もっと読む)
非真円形穴加工方法および非真円形穴加工装置
【課題】高速かつ高精度でワークを加工できる非真円形穴加工方法を提供すること。
【解決手段】非真円形穴加工方法は、シリンダブロックに既に形成された断面非真円形状のボアと同一形状のボアを、シリンダブロックに形成する。すなわち、既に形成されたボア軸線上に複数の測定点を設定し、これら複数の測定点それぞれでのボアの内径形状を測定して、内径形状データとして取得する内径形状データ取得工程と、内径形状データを周波数解析し、0次からn次(nは自然数)までの周波数成分の振幅値および位相値を分析内径形状パラメータとして算出する分析内径形状パラメータ算出工程と、前記内径形状パラメータを、加工装置の電子記憶媒体に記憶させる分析内径形状パラメータ記憶工程と、を備える。
(もっと読む)
工作機械の状態検知装置および方法
【課題】被加工物と工具取付け軸の位置を常に正しく検知しながら正しい寸法の加工物が得られる工作機械の状態検知装置および方法を提供する。
【解決手段】数値制御自動工作機械1において工具取付け軸6はX軸方向の正逆両方向へ駆動され、工具保持部材7はZ軸方向の正逆両方向へ駆動され、移動テーブル13はY軸方向の正逆両方向へ駆動される。工具取付け軸6先端の工具8は移動テーブル13上に固定して載置される被加工物に対して相対的にXYZの3次元方向へ移動しながら被加工物を所定に形状に加工する。工具取付け軸6の下部に配設された波動発信器9から所定の波動エネルギーが常時発信され、据付テーブル3の一方(図の左方)の端部の2個の波動受信機12a、12b、長短4本の波動受信機設置アーム14a、14b、15a、15bに設けられた4個の波動受信機12c、12d、12e、12fにより常時工具取付け軸6の位置と被加工物との位置関係を検出しながら工具8により被加工物が加工される。
(もっと読む)
形状測定装置
【課題】被測定物の3次元形状を規定した測定点群から精度よく簡便に形状測定する形状測定装置を提供する。
【解決手段】被測定物の形状を規定した3次元の測定点群データ2が3次元測定装置8から出力されると、形状測定装置1の断面抽出部3が、測定点群データ2から所定の切断面に含まれる測定点を抽出した断面点群データ4を生成する。測長領域設定部5は断面点群データ4に測長領域を設定する。入出力装置7を介して、ユーザから測長領域の断面点群が指定されると、測長部6がその断面点群を用いて被測定物の外側寸法、内側寸法、2点間寸法、角度等を測定する。
(もっと読む)
温度測定方法、温度測定装置、温度制御方法、温度制御装置、補正方法、及び補正装置
【課題】被測定物の温度分布が異なる場合であっても、被測定物の温度を正確に測定することができる温度測定方法を提供する。
【解決手段】被測定物aの物理量を測定する際に、被測定物aの温度を測定する温度測定方法である。外部気流流入防止手段10にて、被測定物aの物理量測定部位を外部からの気流を遮断する気流流入防止雰囲気に形成し、その雰囲気中で被測定物aの温度又は被測定物aの近傍の温度を測定する。
(もっと読む)
球体の非接触式3軸角速度計測法
【課題】高速回転する球状物体の角速度ベクトルを非接触で計測する手法およびその機構に関するものである。
【解決手段】球体に、目的に応じて選択した適当な物理量の偏向を与えるマーカーをつけ、球体の周囲に配置したセンサによってこれを計測することによって、球体の角速度ベクトルを算出するものである。また、従来の手法においては限定的であった、回転軸方向の計測可能範囲を大幅に拡大するものである。
(もっと読む)
情報処理システム、位置情報検出装置、位置情報管理装置、情報処理方法及びプログラム
【課題】長時間に亘って高精度に測定対象の位置検出を可能とする位置情報検出システムを提供する。
【解決手段】位置情報管理システム1は、絶対座標系での基準位置からの位置を示す位置情報を第1の測定条件又は当該第1の測定条件よりも測定精度が高い第2の測定条件で検出する第1の位置情報検出部と、無線通信により通信する送受信部26とを有する複数の位置情報検出装置10乃至位置情報検出装置14と、送受信部26と無線通信により通信する送受信部34と、送受信部34を介して、第1の位置情報検出部の測定精度を測定開始から測定終了までは第2の測定条件に切り替える制御部32とを有する位置情報管理装置20とを備える。
(もっと読む)
ユークリッド対称性認識システム、方法及びプログラム
【課題】対象物品の計測メッシュからユークリッド対称性認識を行うユークリッド対称性認識システムを提供する。
【解決手段】本発明は、計測メッシュに対してメッシュ各頂点の主曲率を計算し、メッシュ各頂点の主曲率を用いて、平面領域の境界近傍にある頂点集合を特徴領域として抽出し、特徴領域群から形状が一致するシード特徴領域ペアを抽出し、ICP法とRegion Growing法により同一の変換パラメータでマッピング可能な頂点ペアを逐次的に各シード特徴領域に追加することで特徴領域ペアを拡大し、互いにユークリッド対称な領域ペアとそれらの変換パラメータを抽出し、ユークリッド対称な領域ペアから平面反射、回転若しくは平行移動で表現できる領域ペアを見出し、当該領域ペアと共に対称性を表現するシステムを特徴とする。
(もっと読む)
駐車支援装置
【課題】車輪速センサのパルスから算出した車輪の移動距離の誤差を補正し、自車両の位置を精度良く検出することができる駐車支援装置を提供する。
【解決手段】車輪速センサ2から計測されたパルス数に変換係数を乗ずることで車輪の移動距離を算出する車輪移動距離算出手段1と、車輪移動距離から自車両の位置を演算する自車位置演算手段4と、自車両の位置に基づき各距離センサ1によって得られた距離データの分布を各距離センサ1に対し生成する距離データ分布生成手段5と、各距離センサ1の距離データ分布を照合し、車輪の移動距離の誤差を算出する車輪移動距離誤差算出手段6と、車輪の移動距離の誤差に基づき車輪移動距離算出手段3にて用いられる変換係数を補正する変換係数補正手段7を備えている。
(もっと読む)
金属帯の形状測定装置
【要 約】
【課 題】 極薄金属帯の形状を精度良く測定する形状測定装置を提供する
【解決手段】 金属帯を垂直方向に搬送する搬送手段と、金属帯に付加される張力を制御する張力制御手段と、金属帯の搬送速度を測定する速度測定手段と、非接触式距離計によって得られた測定データから金属帯の形状指標を演算する演算手段と、を有する金属帯の形状測定装置。
(もっと読む)
姿勢・移動軌跡検出装置、検出方法、プログラムおよび記録媒体
【課題】物体に装着したセンサノードからのデータを利用して物体の姿勢および移動軌跡を検出する。
【解決手段】姿勢・移動軌跡検出装置1は、物体が運動しているアクティビティ区間の前後の静止区間のセンサデータから物体の姿勢を静止区間の各々について推定する静止姿勢推定部13と、物体の姿勢に基づいてアクティビティ区間の各時刻における物体の姿勢を補間により推定する運動姿勢推定部14と、アクティビティ区間の各時刻について運動姿勢推定部14が推定した物体の姿勢における重力加速度を推定する重力加速度推定部15と、アクティビティ区間の各時刻についてセンサデータと重力加速度とから、外力により生じる物体の加速度を推定する運動加速度推定部16と、物体の加速度からアクティビティ区間における物体の移動速度および移動量を求める移動軌跡推定部17とを備える。
(もっと読む)
ウェーハ平坦度計測方法、ウェーハ平坦度計測装置および計測データ処理装置
【課題】CMP工程の状態を管理する上で、より有用で、より精度の高いウェーハの平坦度を取得する方法の提供。
【解決手段】計測データ処理装置10は、集積回路のマスク形状データに基づきCMP工程で生じる可能性のある窪み部の位置を予測し(窪みデータ生成部102)、その窪み部の上層で生じる可能性のある欠陥の位置を予測し(欠陥候補位置抽出部102)、欠陥のあることが予測される窪み部の中から、AFM20が表面形状データを取得すべき計測位置を決定し(計測位置決定部103)、その計測位置データを付して、AFM20に表面形状データの取得を指示する(表面形状データ取得部104)。また、計測データ処理装置10は、AFM20により計測された表面形状データを、AFM20から取得し(表面形状データ取得部104)、表示装置40に表示する(表示部105)。
(もっと読む)
形状測定装置
【課題】複数台の測定機間での振動の影響を排除した上で高い操作性と測定精度を実現した新たな形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物50を挟んで対向配置される少なくとも2台の駆動機構付き測定機CMM1,CMM2と、これらの測定機ごとにそれぞれ対応して接続される少なくとも2台の制御装置41,42と、を備えるものであって、前記制御装置41,42は、測定機CMM1,CMM2の動作状態を検出自在であるとともに、制御装置41,42ごとで連携を取り合うことにより、一の測定機CMM1の動作状態の検出結果に応じて他の測定機CMM2に対する動作指令を発信自在である。
(もっと読む)
糸重量測定装置、およびそれを備えた糸番手測定装置。
【課題】複数の糸について連続的にかつ各糸について複数回の重量測定を連続的に行うことができる糸重量測定装置およびこの糸重量測定装置を備えた糸番手測定装置を提供する。
【解決手段】糸重量測定装置は、複数の糸を保持可能な保持装置と、保持された糸を特定する特定装置と、特定された糸を所定長さ切出し重量計へ送る切出装置と、切出された糸重量を測定する重量計とを含む。また、特定装置と切出装置と重量計とが保持装置に保持された糸に対しこの順で繰り返し動作でき、切出装置と重量計とがこの順で繰り返し動作できる。こうして、複数本の糸の重量測定と同一の糸に対する複数回の重量測定ができる。このため、測定作業者の作業負担が軽減される。
(もっと読む)
形状測定装置
【課題】高い操作性を有する新たな形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物60を挟んで対向配置される少なくとも2台の駆動機構付き測定機CMM1,CMM2と、これらの測定機ごとにそれぞれ対応して接続される少なくとも2台の操作コントローラ51,52と、を備えるものである。そして、操作コントローラ51,52のそれぞれは、非接続の測定機CMM2,CMM1を含むすべての測定機を操作可能に構成されている。また、操作コントローラ51,52は、切替ボタン53,54を有しており、この切替ボタンを切り替えることによって操作対象となる測定機を選択可能となっている。
(もっと読む)
高温用基準ワーク及びこれを用いた高温物寸法計測用形状計測器の精度検証方法
【課題】熱間鍛造等のような高温環境において寸法計測の基準ワークとして使用できる高温用の基準ワーク、及び同基準ワークを用いた高温物寸法計測用形状計測器の精度検証方法を提供する。
【解決手段】半円形断面形状が一定間隔で一方向に複数個並設された、熱膨張係数が既知で耐酸化性を有する高融点の金属材により高温用の基準ワークを得る。この基準ワークの熱膨張係数と半円形断面形状並設方向の表面形状の寸法の常温での測定値とから検証目標高温時での上記表面形状の寸法を理論値として求めておく。同基準ワークを検証目標高温まで加熱し、その際の上記表面形状の寸法を精度検証対象である非接触型の形状計測器により計測し、上記表面形状中の複数の半円形断面形状について円形状のフィッティング処理を行い、上記表面形状の寸法を実測値として求める。この実測値と上記理論値との比較値を得て高温物寸法計測用の上記形状計測器の精度を検証する。
(もっと読む)
光学系評価方法、加工計画作成方法、面形状評価方法、光学素子の製造方法およびコンピュータプログラム
【課題】例えば、光学系の光学性能を高い精度で評価するための方法およびそれに関連する技術を提供する。
【解決手段】光学系の光学性能を評価する光学系評価方法は、前記光学系に含まれる光学素子の評価対象領域の中に複数の円領域を配置する配置ステップと、前記複数の円領域のそれぞれにおける前記光学素子の面形状を示す面形状データに対して多項式をフィッティングするフィッティングステップと、前記複数の円領域のそれぞれについての前記フィッティングステップにおけるフィッティング結果に基づいて前記光学系の光学性能を計算する計算ステップとを含む。
(もっと読む)
物体の寸法取得を向上させる方法およびコンピュータプログラム
本発明は、物体の上に誘導される寸法測定デバイスによる物体の寸法取得の効率を向上させる方法であって、a)測定デバイスを物体の上に誘導して、その寸法を取得するステップと、b)取得した領域の分解能の指示をもたらすステップと、c)測定デバイスを、取得した領域の、所定の基準に基づいて不十分な分解能を指示する少なくとも一部分の上に再度誘導するステップと、d)取得した領域の分解能の指示を更新するステップと、e)所定の基準に基づいて十分な分解能が指示されるまで、ステップc)およびd)を繰り返すステップとを含み、それにより、物体の寸法を十分な分解能で効率的に取得する方法に関する。本発明は、そのためのコンピュータプログラムにも関する。  (もっと読む)
(もっと読む)
141 - 160 / 642
[ Back to top ]