
Fターム[2F069GG04]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 非接触式 (642)
Fターム[2F069GG04]に分類される特許
161 - 180 / 642
ハブの姿勢検出方法及びその装置
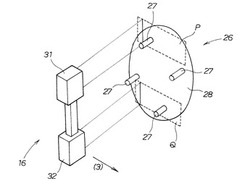
【課題】車両のハブに車輪を取付ける際のハブの傾き、中心及びハブボルトの方位の検出工数を低減できる技術を提供することを課題とする。
【解決手段】距離計測部16をハブ26に臨ませる。距離計測部16を、矢印(3)のように、100mm/sの速度で移動させる。このとき、第1距離計31は破線で示すエリアPまでの距離を計測し、第2距離計32は破線で示すエリアQまでの距離を計測する。
【効果】基準位置からエリアP、Qまでの距離を計測する。ハブ面の全部ではなく、2つのエリアのみ距離計測するので、計測工数及び演算工数が低減できる。加えて、非接触のまま1回の走査で距離計測が完了するので、計測工数を低減できる。
(もっと読む)
樹脂押出用口金装置及び樹脂シートの製造方法

【課題】吐出口から吐出される樹脂材料のシート厚を正確に制御すること。
【解決手段】互いにリップ面11を対向させた状態で接続した一対のリップ10と、リップ面11の相互間距離を調整する調整手段20とを具備し、リップ面11の相互間に構成されるスリット状の吐出口12から樹脂材料を吐出する樹脂押出用口金装置において、吐出口12の外部においてリップ面11に平行となる態様でリップ10に設けた測定面13と、測定面13に対向する態様でリップ10に保持され、予め設定した計測基準から測定面13までの距離を計測する変位センサ30とを備えている。
(もっと読む)
燃料電池材料の欠陥検出方法及び燃料電池材料の分別方法
【課題】本発明は、燃料電池用に用いられるセルおよび/またはハーフセルにおいて重大な欠陥を選定し、かつ各種の測定装置のうち製造工程に合致したものを選定することで、燃料電池材料製造工程において、欠陥検出を一連の工程の下に簡便かつ容易に検出することができることで、製造工程をコンパクト化、スピードアップ化を図ることにある。
【解決手段】本発明は、CCDカメラ、レーザー式反射検出機および/または接触式変位検出機により、燃料電池用のセルおよび/またはハーフセルの欠陥を検出することを特徴とする燃料電池材料の欠陥検出方法である。
(もっと読む)
管体計測装置
【課題】押出機に使用されるバレルの内壁の状態に影響されず、バレルの内壁の凹凸(磨耗量等)を正確に計測できるようにする。
【解決手段】管体計測装置10は、バレル12の中空部14を、バレル12の軸線に沿い、且つ、バレル12の内壁に対して非接触で張設されたレール16(第1レール16a、第2レール16b)と、該レール16に摺動自在に取り付けられ、バレル12の内壁までの径方向の距離を測定する距離センサ部18と、該距離センサ部18をレール16に沿って移動させる移動機構20と、モニタ22等が接続された制御装置24(パーソナルコンピュータ等)とを有する。
(もっと読む)
身長測定装置
【課題】屋外で使用でき正確に測定可能な携帯型の身長測定装置を実現する。
【解決手段】携帯型の身長測定装置であって、装置から床面までの距離を測る第1の超音波センサと、被測定者の胴体までの距離を測る第2の超音波センサと、被測定者の頭部のほぼ先端までの距離を測る第3の超音波センサと、3つの測距情報を用いて被測定者の身長情報を出力する演算処理手段と、超音波センサからの信号を取り込むタイミングを規定するタイミング手段を具える。被測定者は、装置を手に持ち、測定中に鉛直方向に移動させ、第3の超音波センサが被測定者の頭部のほぼ先端を検出した時点において各超音波センサからの出力信号を取り込み、演算処理手段は取り込まれた3つの測距情報に基づいて被測定者の身長情報を得る。頭部のほぼ先端から頭頂までの距離の平均値が性別等に応じて装置に入力されており、この平均値が加算されてより正確な身長を測定できる。
(もっと読む)
金型加工データ変更方法
【課題】元の加工データを有効に利用して短時間に二番型用の加工データを得る。
【解決手段】成形品モデルに基づき、NC加工データを作製する。NC工作機械により、NC加工データに基づいて金型を作製する。金型の修正をして一番型を得る。計測器により、一番型を3次元的に計測して、メッシュデータ34を得る。NC加工データにおける加工工具16の移動経路20を示す複数箇所のデータから選択された箇所36で、加工端面16aがメッシュデータ34に対して点接触する位置まで加工工具16をZ方向に移動させる。元のNC加工データを、移動後の加工工具16の位置に基づいて変更する。
(もっと読む)
長軸部を有する物体の長軸部の先端座標と該物体の位置姿勢を定義する手段との3次元相対関係測定方法およびシステム
【課題】 3次元形状測定精度が通常の環境下でも、手術器具のように長軸部を有する物体の先端部と位置姿勢検出用の標識部との3次元相対関係を精度良く較正できる。
【解決手段】 被測定物体10の長軸部の先端部と第1標識部12との3次元相対関係測定方法であって、較正用物体20を被測定物体の長軸部の先端部に取付けるステップと、3次元形状測定装置により被測定物体および較正用物体の立体形状データ群を測定するステップと、立体形状データ群から第1標識部の位置および姿勢と第2標識部21,22,23の位置および立体形状とを算出するステップと、第2標識部の位置および立体形状と当接部と第2標識部との3次元相対関係とに基づいて当接部24の3次元座標を算出するステップと、第1標識部の位置および姿勢と当接部の3次元座標とに基づいて被測定物体の長軸部の先端部と第1標識部との3次元相対関係を算出するステップと、を有する。
(もっと読む)
球面形状測定装置および球面形状測定方法
【課題】 非接触で球面形状を高精度に測定できる球面形状測定装置および球面形状測定方法を提供する。
【解決手段】 軸部1bの一端に球面形状部1aを有する被測定物1を、被測定物支持手段10により軸部1bの中心軸回りに回転させる。球面形状部1aの表面位置を非接触で測定する非接触変位計31を、その中心軸上の所定位置を回動中心として軸部1bの中心軸を含む平面内で、変位計回動手段32により回動させる。被接触変位計31の軸方向位置は軸方向位置調整手段41で調整する。これにより、被測定物1を回転させながら、その軸部1bの中心軸を含む平面内で前記球面形状部1aの中心を回動中心として非接触変位計31を回動させて、球面形状部1aの球面形状測定を行う。
(もっと読む)
電動式座標測定装置
座標測定装置(10)はハウジング(12)を有し、ハウジングは台(11)上に回転可能に支持され、水平方向並進アーム(15)と係合するキャリッジ(14)を乗せる垂直ピラー(13)が取付けられている。アームの各端のタレット(18、19)が、プローブ(22、23)に接続された回転体(20、21)を収容する。台の回転、キャリッジの垂直運動、アームの水平運動、及びプローブの回転が、ハウジング内のモータ(27、28、29、30)によって駆動される。モータの回転は、ケーブル及びプーリ組立体によってアームとキャリッジに伝達される。アームの横方向動作を制御するケーブル(43)は、キャリッジがピラーに沿って上下に移動する際にケーブルの一定長さ及び張力を維持するために、両端がアーム両端に位置する先端(16、17)に取り付けられ、キャリッジ上側及び下側に位置するピラーの部分に沿って上方及び下方に延在する。プローブを測定表面に対し一定角度で維持するようプローブの回転と基部の回転が協調される。 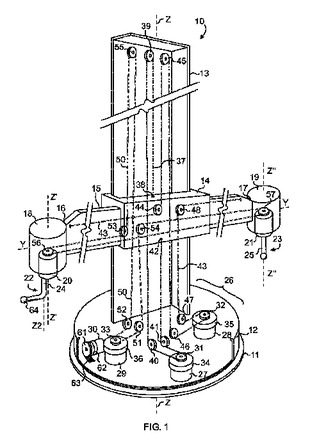 (もっと読む)
(もっと読む)
金属帯板の形状測定装置
【課題】単純な構造で精度が良く、その上安価な金属帯板の形状測定ロール及び金属帯板の形状測定装置を提供する。
【解決手段】金属の帯板が走行する設備に両端が回転自在に支持され前記帯板を巻き付けるように配置されるロールにおいて、該ロールの表面には少なくとも1本以上の周方向から傾斜した溝、又は、少なくとも2本以上の円周方向の溝を設けるとともに、前記ロールの軸方向位置には少なくとも1個以上の前記帯板の変位を測定する変位測定手段を備えた。
(もっと読む)
位置検出システム及び位置検出方法
【課題】長距離を移動する移動体の位置を精度良く検出できる位置検出システムを提供する。
【解決手段】両面に反射面が形成された反射板6が、クレーン本体2の移動経路に沿って、間隔が全て異なるようにして複数配置される。反射板支持フレーム5に内蔵される姿勢状態検出装置は、各反射板6の姿勢状態を検出する。測距装置3は、クレーン本体2と共に移動し、移動経路における前後方向に測定波を出射し、各方向について、反射板6によって反射された測定波の反射波を検出することで、当該反射板6までの距離を計測する。制御装置7は、測距装置3の計測結果と、姿勢状態検出装置の検出結果と、に基づいて、クレーン本体2の現在位置を求める。反射板6は、クレーン本体2が接近した際、測定波を反射可能な姿勢からクレーン本体2の通過を妨げない姿勢に切り替わる。
(もっと読む)
往復動内燃機関のシリンダ直径計測器
【課題】往復動内燃機関のシリンダ直径を精度良く、かつ、容易に計測できる往復動内燃機関のシリンダ直径計測器。
【解決手段】往復動内燃機関のシリンダ101の軸芯O1 上に設けたガイド2と、該ガイド2を保持する支持体3と、前記ガイド2に摺動自在に挿入した支持棒4と、前記シリンダ101の軸芯O1 と交差するように前記支持棒4に取り付けた測長器5より成り、且つ前記測長器5を、棒状の測長器本体6と、該測長器本体6の先端部に設けた接触又は非接触式でかつ測定距離を電気信号に変換して出力する変位変換器7により形成する。
(もっと読む)
鞍乗型車両、および鞍乗型車両の傾き検出装置
【課題】適切に車両の傾きの状態を検出することができる自動二輪車を提供する。
【解決手段】自動二輪車には、車体の進行方向左右の路面Rまでの距離を測定するセンサであって、モーターサイクルの下方向に向けて取付けられる下方距離センサ(左)LL、および下方距離センサ(右)LRと、進行方向左右の路面Rまでの距離を測定するセンサであって、下方距離センサLL,LRよりも外側に向けて取付けられる側方距離センサ(左)SL、および側方距離センサ(右)SRとが設けられている。下方距離センサ(左)LL、および下方距離センサ(右)LRの測定値に基づいて、車両のバンク角θBが算出される。バンク角θBが所定範囲内になければ、側方距離センサ(左)SL、および側方距離センサ(右)SRにより転倒の可能性が判定される。
(もっと読む)
ブレード先端間隙を測定するための方法
ファンケースアセンブリと、複数のブレードを有するロータとを有するガスタービンエンジンのブレード先端間隙を測定するための方法が、センサを有する測定具をファンケースアセンブリに着脱可能に取り付けるステップと、ロータを回転させるステップと、ロータの回転中に複数のブレードのブレード先端間隙を測定するステップとを含む。取付けステップは、測定具と連結されたねじおよびブッシングを、ファンケースアセンブリの孔を通して配置するステップをさらに含むことができる。 (もっと読む)
ブレード先端間隙を測定するための装置
取付けシステムを有するフレームと、フレームと連結されたアームと、アームと連結された測定センサとを備えた、ガスタービンエンジンのブレード先端間隙を測定するための装置。フレームは裏当て部および延出部を有することができ、アームが延出部と連結されることができる。装置は、取付機構が複数のクランプを有することができる。クランプは、協働して装置を定位置に係止するカムおよびねじを有することができる。ねじはブッシングと連結され、ブッシングは当該ブッシングを拡張可能な複数の長孔を有することができる。 (もっと読む)
測定装置
【課題】長尺の真直形状や大型の平面形状を測定するために水準器に代わる道具として、被測定面に接する点と変位センサあるいは角度センサの組み合わせで多点方を実現するために、被測定面上を走査移動可能なセンサホルダを提供する。
【解決手段】被測定面に対して相対的に移動可能なセンサホルダを、被測定面に対して少なくとも2点の接点を有する形態にして、センサホルダと被測定面との2つの接点とセンサホルダの保持するセンサの測定点との3点によって、真直形状測定のための3点法と動揺の差動出力を得て、その出力から形状を求める。
(もっと読む)
検査装置
【課題】測定試料を変えるたびごとに測定点の位置補正を行う必要がなく、更に、測定試料上の同一点についての複数種類の特性の測定を、同一検査装置を用いて行なうことができる検査装置を提供する。
【解決手段】試料を載置するためのステージ3と、1又は複数の検査機器6、7を支持可能な検査機器支持用ヘッド5と、ステージ及び/又は検査機器支持用ヘッドを支持している移動機構23、43と、ステージ上の基準点の実座標と目標座標との偏差を格納する偏差格納部と、複数の検査機器の測定点間のオフセット値を格納するオフセット値格納部と、格納された偏差及びオフセット値を参照して、複数の検査機器のうちのいずれか1つの検査機器の測定点と他の検査機器の測定点とが一致するように、ステージ及び/又は前記検査機器支持用ヘッドを移動させる位置制御部と、を備えている。
(もっと読む)
船の船体の状況或いは状態を調査し且つ決定するか、又は調査するか、或いは決定するシステムと方法
【課題】
船のドック入り間隔が選定でき、特に船の船体の状況或いは状態に依存して延長できるシステムと方法を提供すること。
【解決手段】
船の船体(10)の状況或いは状態、特に外板(12)を調査及び決定又はそのいずれか一方を行うシステム(100;100’)と方法を提供するために、特に船の船体(10)の状況或いは状態に依存して船のドック入り期間を延長させるように選択でき、外板(12)が特に少なくとも一つ格子或いは回路網によって細区分を備えていて、その細区分は船の船体(10)の状況或いは状態を調査し且つ決定するか、又は調査するか、或いは決定する少なくとも一つの浮動/潜水可能な調査/決定/測定ユニット(20、20’)と機能的に共働する。
(もっと読む)
重量のある加工物用の測定装置およびかかる測定装置用の加工物受け具
【課題】重量のある大きいワークピースを、その重量が測定精度に悪影響を及ぼすことなく、迅速で且つ信頼性の高いやり方で測定できるようにする、測定装置及びワークピース受け具を提供する。
【解決手段】ワークピース(2)測定用の測定装置(100)は、ワークピースを受け合うターンテーブル(1)と、ターンテーブル軸受を有するベースプレート(3)と、該ベースプレートが載置される基台(12)とを備えている。前記ターンテーブルは、当該ターンテーブルの下側に位置し、ターンテーブル軸受によってベースプレートに保持される、鉛直方向の軸(W)を備えている。前記ターンテーブル軸受は、ターンテーブルから離間した軸の底部端面(13)にアキシャル軸受(9)を備えている。前記軸は、ワークピースの重量(G)が、ターンテーブルによって受け止められるときは、ターンテーブル,軸及びアキシャル軸受を介して、基台に伝えられるように、アキシャル軸受に回転可能に保持されている。
(もっと読む)
トロイダル面評価方法
【課題】トロイダル面の形状を表す曲率半径等のパラメータを精度よく算出する。
【解決手段】評価対象のトロイダル面を三次元測定器等を用いて形状測定し、2つの曲率半径や軸の回転・傾きの実測値を求める(S1、S2)。次いで、2つの曲率半径、軸の回転・傾きの仮値を、理想面を与える仕様値を基準とした公差の範囲で変化させ、その仮値と実測値との差のPV値が最小となるような仮値をそれぞれ求める(S3〜S6)。そうして最終的に求まった、2つの曲率半径、軸の回転・傾きの仮値を、評価対象のトロイダル面の形状を表す値として出力する(S7)。
(もっと読む)
161 - 180 / 642
[ Back to top ]