
Fターム[2F069GG04]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 非接触式 (642)
Fターム[2F069GG04]に分類される特許
81 - 100 / 642
携帯端末
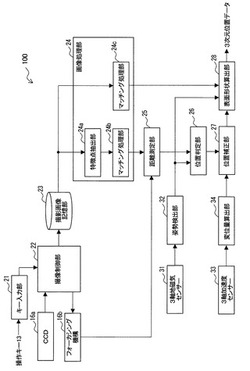
【課題】 空間的に離間した複数の撮影点で同じ対象物を被写体として撮影して撮影点間の相対位置を判定することができる携帯端末を提供する。
【解決手段】 被写体を撮影して静止画像を生成するカメラ16と、カメラ16の光軸の向き及び光軸を中心とする傾きを検出する姿勢検出部32と、静止画像から特徴点を抽出する特徴点抽出部24aと、静止画像内の特徴点に対応する被写体上の点及び当該静止画像の撮影が行われた撮影点間の距離を測定する距離測定部25と、第1撮影点で撮影された第1画像内の特徴点について測定された距離、第2撮影点で撮影された第2画像内の上記特徴点について測定された距離、並びに、第1撮影点及び第2撮影点でのカメラ16の向き及び傾きの各検出結果に基づいて、第1撮影点に対する第2撮影点の相対位置を判定する位置判定部26により構成される。
(もっと読む)
マルチ・ターン回転伝送器

【課題】マルチ・ターン・ユニットの状態を確実に特定する。
【解決手段】マルチ・ターン回転伝送器は、回転軸Wの1回転内の角度を計測するシングル・ターン・ユニット10と、回転数を測定する2つのマルチ・ターン・ユニット20、30を備える。シングル・ターン・ユニットは、コード支持体11と、シングル・ターン位置信号SPをシングル・ターン符号語SCへ処理するためのシングル・ターン評価ユニット14を含む。2つのマルチ・ターン・ユニットはそれぞれ、マルチ・ターン・コード支持体21、31.1(及び31.2)と、生成されたマルチ・ターン位置信号MP1、MP2を、入力軸Wの回転数を表すマルチ・ターン符号語MC1、MC2へ変換するためのマルチ・ターン評価ユニット24、34を含む。2つの独立生成のマルチ・ターン符号語により、マルチ・ターン・ユニットの機能を特定する。
(もっと読む)
コークス炉の移動機の位置検出装置及び位置検出方法
【課題】コークス炉の移動機の現在位置を正確且つ安価に検出できる位置検出装置及び位置検出方法を提供する。
【解決手段】位置検出装置は、レール31〜35に接し移動機21〜25の移動に伴って回転するローラ42の絶対的な回転角度を測定するアブソリュート回転角度検出装置41を備え、移動機21〜25の現在位置を示す位置情報を出力する位置情報出力手段と、位置情報出力手段により出力された移動機21〜25の位置情報の誤差を修正する誤差修正手段と、を備える。誤差修正手段は、コークス炉10に設置された基準標識51と、移動機21〜25に搭載され基準標識51を検出する非接触式センサ52と、非接触式センサ52により基準標識51を検出した場合には、その時点において位置情報出力手段から出力された移動機21〜25の位置情報を、基準標識51に予め付与された基準位置情報に置換する位置情報置換手段と、を備える。
(もっと読む)
車両位置演算装置及び車両位置演算方法
【課題】低コスト化を実現できる車両位置演算装置を提供する。
【解決手段】複数車線道路のうち、一の車線を走行する自車両の位置を計測する自車両位置計測手段と、複数車線道路のうち、他の車線を走行する他車両を検出するセンサ11と、センサ11の検出信号に基づき、自車両に対する他車両の方位を演算する他車両方位演算手段と、一の車線と他の車線との間隔を特定する車線間隔特定手段と、自車両の位置、他車両の方位及び間隔に基づいて、他車両の位置を演算する他車両位置演算手段を有する。
(もっと読む)
形状測定装置
【課題】凹状のゲージを用いた形状測定装置の校正の精度の低下を防止する。
【解決手段】形状測定装置のステージの上面に設けられているゲージは、形状測定装置の校正に用いる凹球面状の凹部と、凹部の底から垂直に突出するように設けられている送風部材52により構成される。送風部材52の送風部52Aの下面には、下面の外周に沿って、送風口61−1乃至61−nが所定の間隔で配置されている。形状測定装置の電源が投入されている間、常にこの送風口61−1乃至61−nから凹部の表面に向かって風が吹き出され、凹部の表面の埃などの異物が吹き飛ばされる。本発明は、例えば、被検物の3次元形状を測定する形状測定装置に適用できる。
(もっと読む)
関節プローブヘッド
【課題】関節プローブヘッドの回転軸をロックするためのブレーキを提供する。
【解決手段】支持体に取り付くための第1のマウントと、表面検出装置が取り付け可能な第2のマウントとを備え、第2のマウントが第1のマウントに対し一以上の軸回りに回転可能である関節プローブヘッドにおいて、第1のマウントに対する第2のマウントの一以上の軸回りの位置をロックするための少なくとも一以上の機械式ブレーキが設けられ、これにより、少なくとも一つの位置測定装置が、ロック位置において、第1のマウントに対する第2のマウントの一以上の軸回りの位置を決定すべく設けられる。
(もっと読む)
位置認識装置及び位置認識方法並びに位置決め装置
【課題】半導体ウエハの位置認識及び位置決めの精度を向上でき、信頼性を高めることができるようにすること。
【解決手段】位置認識装置11は、半導体ウエハWの端縁の位置を検出可能な複数のセンサa1、a2、b1、b2を備えた検出手段16と、半導体ウエハWと検出手段16とを直線方向に相対移動可能な移動手段17と、検出手段16の検出データから半導体ウエハWの中心位置を算出可能な制御手段18とを備えて構成されている。検出手段16は、前記相対移動する直線方向に対して直交する方向に、所定間隔を隔てて少なくとも4か所にセンサa1、a2、b1、b2が設けられている。
(もっと読む)
加工仕上げ面の検査システム及び検査方法
【課題】画像から迅速にビビリマークを評価できる加工仕上げ面の検査システム及び検査方法を提供する。
【解決手段】回転工具により機械加工された加工仕上げ面の検査方法であって、前記加工仕上げ面を観察してビビリマークの有無を判断し、観察によりビビリマークが確認された場合にビビリマークの幅寸法を前記回転工具の回転軸方向で計測し、計測されたビビリマークの幅寸法がしきい値以上である場合にビビリマークの深さが許容値以上であると判定する。その結果、画像より加工仕上げ面の検査が迅速に可能となる。ビビリマークの深さが許容値よりも深い場合には表面の研磨を行い、再度加工仕上げ面の検査を実施する。
(もっと読む)
内径測定装置及びその内径測定装置を用いた管路内径測定システム
【課題】管路内走行時に管の正確な内径を測定できる内径測定装置及びその内径測定装置を用いた管路内径測定システムを提供する。
【解決手段】本体部及び本体部を既設管路の内部で走行可能に支持する本体支持部、本体部に配設されて既設管路の内径を計測する内径測定部を備える内径測定装置において、内径測定装置の重心位置を、内径測定装置の既設管路への導入状態における中央位置に対して下方へ偏位させる。これにより、既設管路内を走行中の内径測定装置に振動等が付与されることに起因する内径測定装置の内壁に沿った旋回しながらの走行が抑制される。その結果、内径測定部による計測の軌跡が管路の軸線に平行するので、既設管路の正確かつ精密な内径測定が達成される。
(もっと読む)
位置決定システム
本発明は、オブジェクト(2)の位置を決定するための位置決定システム(201)に関する。第一位置検出ユニット(205)が、送受信ユニット(203、214、216、217)によってオブジェクト(2)と基準位置に対して知られている転送位置との間で転送される放射に基づいて、オブジェクト(2)の第一の位置を検出する。第二位置検出ユニット(35)が、オブジェクト(2)の加速度および決定された前記第一の位置に基づいて第二の位置を検出する。出力ユニット(12)が、第一の位置および第二の位置の少なくとも一つを出力する。放射の転送が遮られても、第二の位置が出力ユニットによって出力されることができる。さらに、第一の位置が、第二の位置を決定するまたは第二の位置を更新するための初期値として使用されることができる。これはオブジェクトの位置決定の品質を改善する。 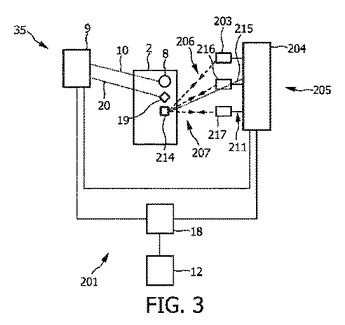 (もっと読む)
(もっと読む)
三次元道路中心線データの生成方法およびその装置
【課題】三次元走行軌跡をもとに三次元道路中心線データを自動生成する。
【解決手段】道路走行時に取得した位置センサの走行軌跡を、平面線形として生成された平面走行軌跡から、制御点検出手段は制御点を検出し、平面線形の生成において円弧検出手段が制御点に関連して円弧を検出し、縦断線形の生成においては放物線検出手段が放物線に近似させた円弧を検出し、平面線形の生成においては緩和曲線検出手段が円弧につながる緩和曲線を検出し、直線検出手段は前記検出した制御点、円弧、緩和曲線から直線を検出するから、これらの制御点、円弧、緩和曲線、直線をつないだ線を平面線形、縦断線形の中心線として滑らかに生成することができる。
(もっと読む)
円形の物体のサイズを測定する手段とその方法
【課題】 短い軌道ですばやく円形の物件のサイズを測定することができる円形の物件のサイズを測定する手段とその方法を提供する。
【解決手段】軌道と、第一、第二、第三センサーと、を含んでなり、該第一、第二、第三センサーが、軌道上に直線に配置され、被測定物件が第一、第二、第三センサーを通過した時間点を記録し、第一、第二センサーと、第二、第三センサーの間の距離を基に被測定物件のサイズを算出する。
(もっと読む)
走査運動誤差測定方法
【課題】特別な外部基準を必要としないため簡便、低コスト、迅速、低設置面積といった特徴を持つ走査運動誤差測定方法において、従来、取り除くことのできなかったスピンドル回転誤差の影響を低減できる走査運動誤差測定方法を提供する。
【解決手段】旋盤や円筒研削盤上において作製した加工対象である被加工物5をスピンドル3から取り外すことなくそのまま測定の基準として用いて、被加工物5を搭載したスピンドル3の回転中心軸4に対して工具Tと正対する位置に変位検出器Bを配置し、回転中心軸4に沿ってスライドにより走査しながら得られた変位検出器Bの出力から、回転中心軸4を基準としたスライド走査機構の持つ運動誤差を測定する装置において、回転中心軸4の整数回転分の平均を求めることにより、回転中心軸4の運動誤差の影響を低減する。
(もっと読む)
位置測定システム
【課題】簡易な設備構成で、かつ正確に位置情報を補正することが可能な位置測定システムを提供する。
【解決手段】位置測定システム1は、レールの変位を計測する変位センサ34と、位置を計測する距離計31と、データ処理装置4と、を移動体2に搭載している。また、位置測定システム1のデータ処理装置4は、各遊間9の位置情報が登録されている遊間位置管理DB43を備える。データ処理装置4の制御部41は、変位センサ34の計測データ及び距離計31の計測位置データを監視している。制御部41は、変位センサ34の計測データが遊間9に固有の特徴的なデータを示した際における計測位置データまたはその近傍にある遊間位置情報を遊間位置管理DB43から抽出し、予測値として保持する。そして、距離計31による計測位置データと、抽出した予測値とを照合し、一致しない場合は、計測した距離を予測値(登録されている遊間位置情報)に補正する。
(もっと読む)
測定スタンドおよびその電気制御方法
【課題】 特に薄層の厚さ測定に適した、測定用プローブを保持する測定スタンドおよびその制御方法の提供。
【解決手段】 測定用プローブ(26)を保持する保持器(24)を担持する変位部材(23)と、その変位部材を測定用プローブとともに上下に駆動する駆動ユニット(35)との間に、フリーホイール機構(51)を介在させ、測定用プローブ(26)または保持器(24)が測定対象(14)に接触すると、駆動ユニット(35)による駆動が変位部材(23)から切り離され且つスイッチング・デバイス(58)がスイッチング信号を制御ユニットへ送出する。
(もっと読む)
測定装置
【課題】移動しながら同一の被測定物を複数回測定したときに正しい高さ得る。
【解決手段】測定間隔算出部21は、速度センサ部13によって測定された車両1の速度測定値から、距離センサ部14が1つの被測定物100を複数回測定可能な測定時間間隔を算出し、指示部22は、算出された測定時間間隔で測定を行なうよう距離センサ部14へ指示する。判断部24は、距離センサ部14から出力された距離測定情報から、測定の対象とする被測定物と、実際に測定した被測定物100の形状が一致するか否かを判断し、形状が一致すると判断した場合、被測定物100を測定したときに連続して得られた距離測定情報の中から最小の距離を示す距離測定情報を選択し、これを正しい距離測定情報とする。地上高算出部26は、選択された距離測定情報で示される距離測定値に、距離センサ部14の測定の始点から地上までの距離を加算し、被測定物100の地上高値を算出する。
(もっと読む)
閉水路変位計
【課題】
不動点間に気中にて基準線を張架して、これを基準として変位を計測することが一般的に行われているが、基準線の揺動、温度変化による伸縮変化が著しく、計測精度が損なわれるという問題があった。
【解決手段】
本発明によれば、不動点間に液体を満に貯留してその中間部に変位計測部位を有する液路を設け、この液路内に線状部材を張架して、変位計測部位に取付けた非接触変位センサにより線状部材との間隙を測定するようにした。
(もっと読む)
測定方法及び測定装置
【課題】繋ぎ合わせ演算を高精度に行うことが可能な測定方法を提供する。
【解決手段】本発明の測定方法は、被測定物を複数の部分領域に分割して測定し、複数の部分領域を繋ぎ合わせて被測定物の全体形状を測定する測定方法であって、複数の部分領域を測定するステップS501〜S511と、基準となる部分領域における誤差を固定するステップS102と、複数の部分領域における各誤差を算出するステップS105と、各誤差に応じた補正を行って複数の部分領域を繋ぎ合わせるステップS107とを有し、ステップS102〜S107は、基準となる部分領域を変えて繰り返し実行される(S110)。
(もっと読む)
機上測定システム
【課題】測定結果の測定精度の高い、ワークの3次元曲面形状を自動測定できる機上測定システムを提供する。
【解決手段】機上測定システム100は、3次元的にXYZ各軸方向に移動自在な主軸51を備えた工作機械50と、測定対象であるワークWの近傍に設置され、それ自体では動力を持たない複数の関節部16a、16b、16cと複数のアーム部15a、15b、15cを有するとともに、その先端部18に非接触式、または接触式の形状測定子9を設けられた多関節型アーム式測定器10と、主軸51に取り付けられ、形状測定子9がワークWに臨むように先端部18を主軸51に取り付ける結合部20と、結合部20の形状が反映させ、測定しようとするワークWの所望の箇所に形状測定子9を動かすように工作機械50を移動させる測定経路プログラムを具備した制御部を含み、ワークWを精度よく自動測定する。
(もっと読む)
繋ぎ目検出装置及び測長装置
【課題】連続帯状体の表面に検出部を変位可能に接触配置し、変位センサー部は変位信号を出力し、A/D変換部が変位データを出力し、しきい値演算部は変位データを基にしきい値を求め、比較判定部は変位データがしきい値よりも大であるとき判定信号を出力し、繋ぎ目信号出力部は判定信号が出力されたとき繋ぎ目信号を出力し、繋ぎ目検出精度を高めることができる。
【解決手段】繋ぎ目Jに凸部を有してなる連続帯状体Wの表面に接触して変位可能な検出部1を設け、繋ぎ目検出装置において、変位信号を出力する変位センサー部5と、変位信号をデジタル数値化して変位データDを出力するA/D変換部6と、しきい値Tを求めるしきい値演算部7と、変位データがしきい値よりも大であるとき判定信号を出力する比較判定部8と、判定信号が出力されたとき繋ぎ目信号を出力する繋ぎ目信号出力部9とを備えてなる。
(もっと読む)
81 - 100 / 642
[ Back to top ]