
Fターム[2F069GG04]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 非接触式 (642)
Fターム[2F069GG04]に分類される特許
41 - 60 / 642
球体移動経路の測定方法
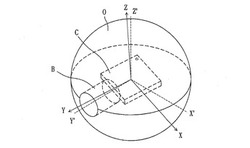
【課題】球体の実際の移動状態に近いデータを獲得可能な球体移動経路の測定方法を提供する。
【解決手段】操作ユニットおよび三軸加速度計Cを用意し、三軸加速度計Cと操作ユニットとを接続させ、三軸加速度計Cで測定したデータを操作ユニットに伝送し、測定対象物Oの内部に三軸加速度計Cを置き、三軸加速度計CでXYZ三軸の空間座標を定義し、第一測定時点に三軸の初期位置を確認し、第二測定時点に比較位置を確認し、データを操作ユニットに伝送する。XYZ三軸のそれぞれの比較位置と初期位置との間の角度を比較し、XYZ三軸の軸方向上の力を受けた後の加速度データと、それぞれ軸方向の分力のベクトルと、それぞれ軸に対する旋転力とを算出する。三つの軸方向の加速度値と、測定対象物Oの重量およびサイズとに基づいて、測定対象物Oの初期速度、飛行時間、飛行高度、飛行距離および旋転速度のうちの少なくとも一つのデータを求める。
(もっと読む)
外径寸法測定装置

【課題】安価で、被測定物の直径や長さに影響を受けずに精度よく外径寸法を測定することができる外径寸法測定装置を提供する。
【解決手段】本発明に係る外径寸法測定装置1aは、流体と、加工部で加工された被測定物の自重と、の少なくとも一方を利用して前記被測定物を搬送する搬送部10と、前記被測定物に付着した液体を除去する液体除去部20と、前記被測定物の外径寸法をリアルタイムに測定する測定部30と、を有する。
(もっと読む)
工作機械用測定方法
【課題】本発明は、工作機械上の被加工物を測定する方法及び装置を提供する。
【解決手段】工作機械において、プログラム(12)は、被加工物Wの特徴を測定する走査プローブまたはアナログ・プローブPからデータを受け取る。このデータは、走査移動中に、前提の機械位置データと組み合わされる。このことは、実際に測定された位置データを得るために、サーボ・フィードバック・ループ(24)に割り込まなければならないことを防止する。前提の機械位置データは、走査移動を制御する部品プログラム(20)から引き出される。また、いくつかの方法で前提の機械位置の値と実際の値との間の誤差を補償する。
(もっと読む)
情報処理装置およびその動作方法
【課題】 従来技術によると、髪の色の異なり等によって、音源(口唇)の位置を推定できない場合がある。
【解決手段】 上記課題を解決するために本発明に係る情報処理装置は、三次元の領域内に存在するオブジェクトと、基準となる面との距離を示す距離画像を取得し、前記距離画像に基づいて、前記距離が極値となる前記領域内の第1の位置を特定し、前記第1の位置から、前記オブジェクトが存在している方向に所定距離離れた第2の位置を特定し、前記第2の位置に基づいて、音源の位置を決定する。
(もっと読む)
校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置
【課題】レンズの偏心を測定できる形状測定装置を簡易的に、かつ高精度に校正できる校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置を提供する。
【解決手段】校正用冶具100は、中心が円周上を3等分し、計測用基準球を接するように設置できる3個の基準球2を備える。形状測定装置は、該校正用冶具を配置可能であり、被測定物の形状に関する情報を取得するための第1プローブと、校正用冶具に対して第1プローブと反対側に設けられ被測定物の形状に関する情報を取得するための第2プローブと、第1プローブ及び第2プローブにより、配置された計測用基準球を測定して第1測定結果及び第2測定結果を求める測定部と、第1測定結果及び第2測定結果を比較してシフトを算出するシフト量算出部と、を備える。校正方法は、上記形状測定装置を用いた測定ステップとシフト量等を算出するシフト量算出ステップとを備える。
(もっと読む)
積層鉄心の積みズレ測定方法及び測定装置並びにコンピュータプログラム
【課題】積層鉄心の積みズレ測定方法及び測定装置において、積層鉄心の積層面における積みズレの測定を高精度且つ迅速に行う。
【解決方法】積層鉄心の積みズレ測定方法は、積層方向に沿って、積層鉄心(1)の積層面のプロファイルを取得する工程と、プロファイルのうち傾きの絶対値が所定の閾値を超える領域を鉄心間の谷間であると特定する工程と、プロファイルを特定された谷間を境界としてサブプロファイルに分割する工程と、サブプロファイル毎に波形の極大値を算出する工程と、算出された極大値のうち、最大のものと最小のものとの差異を積みズレとして算出する工程とを備える。
(もっと読む)
測定システム
【課題】高速、かつ少ない振動およびエラーで部品表面の多数の座標ポイント取得できるようにする。
【解決手段】基準表面に対して可動サポートを位置決めするための1つ以上のアクチュエータとを含む測定システムであって、前記可動サポートが、サポートコネクタと、前記可動サポートと取り外し可能に接続された、前記基準表面に位置決めされたワークピースの表面の走査経路にある複数のポイントを測定するための走査プローブと、前記サポートコネクタと相互作用するように配置された、モジュラ回転取り付け具を前記可動サポートに接続させるための第1のコネクタ90、およびプローブコネクタと相互作用するように配置された、前記走査プローブを前記モジュラ回転取り付け具に接続させるための第2のコネクタ40を備えるモジュラ回転取り付け具と、前記第2のコネクタを前記第1のコネクタに対して回転させるためのアクチュエータ58とを有す。
(もっと読む)
部品の外径測定装置及び外径測定方法
【課題】外径測定を簡便な演算及び装置により測定することが可能な部品の外径測定装置及び外径測定方法を提供する。
【解決手段】第1の方向に延在する本体部1aと、第1の方向と直交する第2の方向に延在する端部1b、1cを本体部1aの両端にそれぞれ有するアームと1、端部1b、1cの端面にそれぞれ設けられ、部品の表面に接触するための球または円筒形状を有する位置決め治具2と、本体部1aに配置され位置決め治具に表面が接触した部品までの距離を測定するためのゲージ3とを備える。
(もっと読む)
操舵角検出装置および操舵角検出方法
【課題】測定作業の容易化およびコストダウンを図る上で有利な操舵角検出装置および操舵角検出方法を提供する。
【解決手段】ステアリングホイール2の非円形部2Dは、ステアリングシャフト方向、すなわち、回転軸方向から見て回転軸の周りに非円形を呈している。操舵角検出装置10は、ステアリングホイール2の非円形部2Dの回転軸の半径方向における変位量と、ステアリングホイール2の回転方向とを検出すると共に、変位量と操舵角とを対応付けたデータテーブルから操舵角を特定して出力すると共に、操舵角の特定は、検出された変位量と、直近の操舵角と、ステアリングホイール2の回転方向とに基づいて行う。
(もっと読む)
自己位置推定装置および自己位置推定方法
【課題】高サンプリング周期で、高精度に自己位置を推定することが可能な自己位置推定装置を提供する。
【解決手段】本発明の自己位置推定装置は、移動機構を備え、所定の空間を移動可能な自律移動装置の移動機構による動作情報を検出する内界センサ、および所定の空間内に関する空間情報を検出する外界センサによる検出結果に基づいて、第1のサンプリング周期で自己位置を推定する第1の自己位置推定部と、第1の自己位置推定部による自己位置推定結果と、内界センサにより検出された自律移動装置の動作情報とに基づいて、第1のサンプリング周期よりも高いサンプリング周期で自己位置を推定する第2の自己位置推定部と、を備える。
(もっと読む)
管端部のねじ要素測定方法
【課題】ねじ加工が施された管端部のねじ要素をオンライン(ねじ加工ライン)で自動的に精度良く測定する方法を提供する。
【解決手段】本発明は、順次搬送される管Pの端部にねじ加工が施されるねじ加工ライン100上で、ねじ加工後の管端部のねじ要素を自動的に測定する方法であって、ねじ加工後の管端部をねじ洗浄装置30で洗浄する洗浄工程と、前記洗浄された管端部をねじ乾燥装置40で乾燥させる乾燥工程と、前記乾燥後の管端部のねじ要素を自動ねじ要素測定装置50で測定する測定工程とを含み、少なくとも前記測定工程においては、管端部が清浄雰囲気下におかれることを特徴とする。
(もっと読む)
表面測定測定機のための測定方法
座標位置測定装置による測定エラーの修正
座標位置測定装置のためのエラー修正方法を開示する。この方法は、(i)各々が第一の物体の表面上のある位置を表す1つまたは複数の第一のデータ値を含む第一のデータセットを取得するステップと、(ii)各々が第一の物体の表面上のある位置を表す1つまたは複数の第二のデータ値を含む第二のデータセットを取得するステップと、(iii)各々が、第一のデータセットにより説明される表面と第二のデータセットにより説明される表面の間の位置差を表す1つまたは複数のエラー値を含むエラーマップを計算するステップと、を含む。第一の物体の面法線が第一のデータ値の各々によって表される各位置において既知であり、ステップ(iii)は、実質的に既知の面法線の方向の位置差を判断することによって各エラー値を計算するステップを含む。加工または測定作業は、第一の物体または第一の物体と名目上同一の物体について実行され、その表面上の位置がステップ(iii)で計算されたエラーマップを使って修正される。 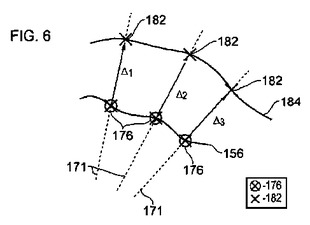 (もっと読む)
(もっと読む)
パターン化された構造を測定するための方法およびシステム
パターン化された構造の少なくとも1つのパラメータの測定で使用するための方法およびシステムが提供される。方法は:構造の異なる位置上の測定に対応する複数の測定された信号を含む測定されたデータと、理論的信号と測定された信号との間の関係は、構造の少なくとも1つのパラメータを示す理論的信号を示すデータとを含む入力データを提供する過程と;構造の少なくとも1つの性質を特徴付ける少なくとも1つの選択されたグローバルパラメータに基づきペナルティ関数を提供する過程と;フィッティングプロシージャの前記実行は、理論的信号と測定された信号との間の最適化された関係を決定するために前記ペナルティ関数を使用することと、構造の前記少なくとも1つのパラメータを決定するために最適化された関係を使用することとを含む、理論的信号と測定された信号との間のフィッティングプロシージャを実行する過程と;からなる。 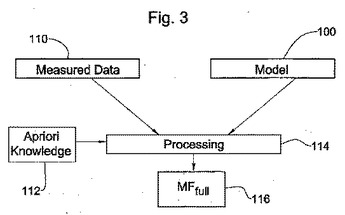 (もっと読む)
(もっと読む)
慣性測定法による軌道検測装置の低速時精度補償方法及びその装置
【課題】 軌道検測車の低速走行時における慣性測定法の精度低下を補償し、測定下限速度を引き下げることができる慣性測定法による軌道検測装置の低速時精度補償方法及びその装置を提供する。
【解決手段】 慣性測定法による軌道検測の低速時精度補償装置において、慣性測定で得られる加速度・角度・変位の信号を位相補償・波形変換器6で得て、軌道検測車1の低速時には位相補償・波形変換器6から分岐して低速時精度補償部8によって演算し、軌道検測車1の低速時における出力として軌道狂いを計測する。
(もっと読む)
測定物保持装置及び方法並びに平面度測定装置
【課題】測定物を保持する際に測定物が自重の撓みにより変形されることのない測定物保持装置を提供する。
【解決手段】測定物11の平面度測定に用いられる測定物保持装置20であって、測定物11が載置される載置面11aを有する載置台40と、載置台40に、載置面4002から突出して測定物11を下方から複数箇所で支持し載置面4002からの高さが変更可能に設けられた複数の測定物支持部材60と、各測定物支持部材60が測定物11に対して均一な接触圧力で接するように各測定物支持部材60の載置面4002からの高さを変更する制御手段80とを備える構成にした。
(もっと読む)
座標測定デバイス
可搬型の座標測定デバイスが、提供される。座標測定デバイスは、少なくとも1つのアームを含む。一端に磁気部材を含むブラケットが、アームに結合される。プローブが、アームの一端に回転可能なように結合され、プローブは、第1の側面に第1の鉄部材を含み、プローブは、第1の位置と第2の位置の間を動くことができ、鉄部材は、第2の位置にあるときに磁石に近接する。 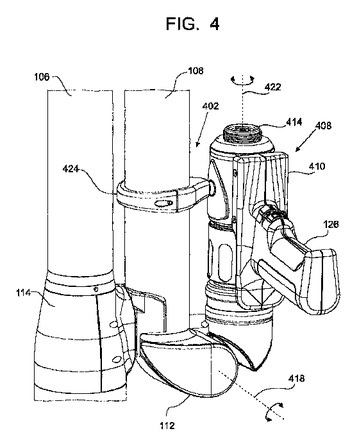 (もっと読む)
(もっと読む)
形状測定装置
【課題】被検物の形状測定において、測定プローブと被検物との位置合わせ作業を簡単に
行うことが可能な構成の形状測定装置を提供する。
【解決手段】被検物に対して光プローブ20を相対移動させて、光プローブ20により得
られた情報から被検物の三次元形状を非接触で測定するように構成された形状測定装置に
おいて、光プローブ20を被検物に対して所定の位置となるように移動させる門型構造体
10と、被検物を少なくとも2つの回転軸方向に回転させる支持装置30とを有して構成
される。
(もっと読む)
レンズ中心厚測定器およびレンズ中心厚測定方法
【課題】形状や厚みが異なる種々の被検レンズのレンズ中心厚を、被検レンズの外観品質を低下させることなく正確に測定することが容易なレンズ中心厚測定器を提供すること。
【解決手段】測距用のセンサヘッド22a,22bを有する2台の非接触型測長計2a,2bと、これら2台の非接触型測長計それぞれのセンサヘッドを互いに対向させ、各センサヘッドの測定軸MA1,MA2を互いに一致させて支持する測長計支持部3Aと、センサヘッド間に設けられ、被検レンズL1の少なくとも光学中心Lc,Ldを露出させて且つ該被検レンズの光軸Lxを測定軸に一致させて該被検レンズを保持するレンズ保持部4Aとを用いてレンズ中心厚測定器1Aを構成する。
(もっと読む)
可搬型の関節アーム座標測定機および統合された電子データ処理システム
可搬型の関節アーム座標測定機の実装が、機能を実行する第1の要求を受信するステップを含む。可搬型のAACMMは、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム部であって、複数の接続されたアームセグメントを含み、各アームセグメントが位置信号を生成するための少なくとも1つの位置トランスデューサを含む、関節アーム部と、AACMMの第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信し、測定デバイスの位置に対応するデータを提供する電子回路とを含む。可搬型の関節アーム座標測定機の実装は、第1の要求が受信される送信元デバイスを特定するステップと、第1の要求に従って機能を実施するステップと、第1のポートおよび第2のポートのうちのどちらから第1の要求が受信されるかを特定することによって、送信先デバイスを第1の要求の送信元デバイスとして選択するステップと、機能を実施することにより得られた情報を送信先デバイスに送信するステップとをさらに含む。  (もっと読む)
(もっと読む)
41 - 60 / 642
[ Back to top ]