
Fターム[2F069GG04]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 非接触式 (642)
Fターム[2F069GG04]に分類される特許
101 - 120 / 642
センサホルダ及びセンサ支持装置
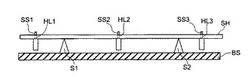
【課題】棒状のセンサホルダに取り付けた3つのセンサにおける鉛直方向の位置ズレを抑制する。
【解決手段】予め決められた孔HL1〜HL3にセンサSS1〜SS3を固定して検出軸方向を鉛直方向に向けた時の、センサホルダSHのたわみ量は、2点支持の梁の集中質量と分布質量を考慮して計算できるので、3つのセンサSS1〜SS3の固定位置の重力によるたわみが等しくなる位置が定まるため、孔HL1〜HL3にセンサSS1〜SS3を配置するのみで、センサSS1〜SS3の鉛直方向のズレがゼロとなる。これにより精度の良い測定が可能となる。
(もっと読む)
相対変位計測方法及び相対変位計測装置

【課題】蒸気発生器の伝熱管と振止部材との相対変位を計測できる相対変位計測方法を提供することにある。
【解決手段】伝熱管と振止部材との間で発生する相対変位を検出する相対変位計測方法であって、伝熱管に配置された距離測定手段により、振止部材に配置されたターゲットとの距離を測定する測定ステップと、測定ステップにより測定した間隔に基づいて、伝熱管と振止部材との相対変位を算出する算出ステップとを有し、振動時の伝熱管の所定位置と振止部材の所定位置との相対変位を計測することで上記課題を解決する。
(もっと読む)
面形状測定機、面形状測定方法、及び面形状の測定値の解析方法
【課題】軸を中心として回転対称な非球面部材における非球面の輪郭形状の測定において、軸を挟んだ対称な有効径の範囲全体を対象とすることなく、短い時間で輪郭形状の誤差を高精度に測定可能な面形状測定機、測定方法及び面形状の測定値の解析方法の提供。
【解決手段】軸を挟んだ非対称な範囲Mにおいて非球面の輪郭形状を測定し、軸を挟んだ対称な範囲Maにおける測定値と非球面の輪郭形状の設計値とを用いて所定の収束条件を満たすまで収束計算を行なう。次いで、範囲Mから範囲Maを除いた範囲Mbにおける収束計算後の測定値を、軸を挟んだ他方の側の範囲Cに軸対称に仮測定値として補完する。次いで、範囲Mと範囲Cとを合わせた範囲において、範囲Mにおける収束計算後の測定値と仮測定値と非球面の輪郭形状の設計値とを用いて所定の収束条件を満たすまで収束計算を行ない、非球面の輪郭形状の誤差を算出する。
(もっと読む)
リンクチェーンの伸びの測定方法および装置
【課題】リンクチェーンにおけるリンクの伸びを高精度に測定し、リンクごとに適切なメンテナンスを実施可能なようにして、そのリンクチェーンがフィルム延伸装置に用いられる場合には品質の優れたフィルムを安定に生産できるようにする。
【解決手段】nとmを整数として、複数のリンクが互いに連結されたリンクチェーンにおける、m個のリンクが互いに連結された基準長のリンク部分の始端部と終端部とを一対のセンサによって同じタイミングで検知できるように準備しておき、測定対象となる他のm個のリンクのうちの始端部の第n番のリンクと終端部の第n+m−1番のリンクとを一対のセンサによって検知するとともに、その検知の際に、第n番のリンクの検知タイミングと第n+m−1番のリンクの検知タイミングとの時間差を求め、この時間差とリンクチェーンの移動速度とを用いて、m個の他のリンクについての基準長からの変化量を求める。
(もっと読む)
エンジンマウント変位測定方法
【課題】計測器を用いて車両に対するエンジンマウントの変位を迅速且つ正確に測定できるエンジンマウント変位測定方法を提供する。
【解決手段】車両1を定盤11の上に配置して、車両1の車軸方向に基づいて車両基準の座標系P(x、y、z)を決定し、車両基準の座標系P(x、y、z)における計測器21、51の原点位置と、計測器基準の座標系Q(X、Y、Z)におけるエンジンマウントの三次元位置とを用いて所定の座標変換行列式により、車両基準の座標系P(x、y、z)におけるエンジンマウントの三次元位置を算出する。これにより、車両基準の座標系P(x、y、z)におけるエンジンマウントの変位を迅速且つ正確に測定することができる。
(もっと読む)
シリンダボアの熱変形測定装置
【課題】温間での測定においてシリンダボアの壁面の温度分布の変化を低減するとともに、エンジン実働時に近い温度分布を実現させてシリンダボアの正確な熱変形を測定できるシリンダボアの熱変形測定装置を提供する。
【解決手段】シリンダボア2に挿入されるピストン状の本体20と、本体20に設けられ、ボア壁面3のシリンダボア2の径方向の位置を読み取るギャップセンサ30と、本体20をシリンダボア2の高さ方向に所定の範囲で上下動させる駆動機構と、ギャップセンサ30をボア壁面3に沿う円周方向に回転させるとともに円周方向における所定の位置で位置決めするロータ27と、ギャップセンサ30の高さ方向における位置を読み取る回転センサ等と、ギャップセンサ30の円周方向における位置を読み取るロータリエンコーダ等と、を備えた。
(もっと読む)
管の機械加工方法
本発明は、コンピュータ制御された管の機械加工、特に、レーザによる管の切断のための方法に関する。上記方法は、以下のステップを備えている。
−或る長さの管を供給するステップと、
−コンピュータ制御された機械加工ステーションに上記供給された管を配置するステップと、
−上記供給された管を機械加工するために、上記機械加工ステーションを制御するためのプログラムを実行するステップと、
−上記コンピュータ制御された機械加工ステーションに上記管を配置する前に、上記供給された長さの管の寸法を計測するステップ。 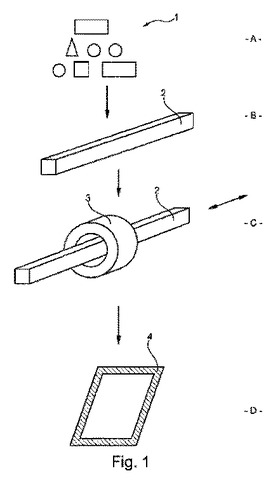 (もっと読む)
(もっと読む)
位置検出装置、位置検出方法及びプログラム
【課題】プライバシー問題に影響されることなく計算コストを抑制しながら空間内における人の位置と向きを検出可能な位置検出装置を提供する。
【解決手段】 位置検出装置10は、空間に設置され、空間内に位置する人との距離を非接触で測定する複数の距離センサ11〜14と、複数の距離センサ11〜14から所定の時間間隔で取得される距離情報に基づき、空間内における人の位置および向きを所定の演算により検出する演算制御装置16とを含む。
(もっと読む)
作業装置
【課題】移動機構部の先端に着脱可能なヘッド部を、空間内の目標位置に高精度に位置決めすることができる作業装置を提供する。
【解決手段】形状測定装置(作業装置)100は、形状センサ部17が内蔵されたプローブ(ヘッド部)12と、所定の空間内でプローブ12を移動させるアーム部(移動機構部)11に、このプローブ12を取り付け可能な取付部16と、空間内における所定の目標位置にプローブ12を位置決めする空間位置決定部30と、を有する。
(もっと読む)
リソグラフィ装置、及びリソグラフィ工程で使用するパターニングデバイス
【課題】 パターニングデバイスとパターニングデバイス支持体との間のずれが考慮されるリソグラフィ装置のパターニングデバイスに位置測定システムを提供する。
【解決手段】 本発明は、放射ビームを調整するように構成された照明システムと、放射ビームの断面にパターンを付与してパターン付放射ビームを形成することができるパターニングデバイスを支持するように構成されたパターニングデバイス支持体と、基板を保持するように構成された基板支持体と、パターン付放射ビームを基板のターゲット部分に投影するように構成された投影システムと、少なくとも基板のターゲット部分へのパターン付放射ビームの投影の間、パターニングデバイス上に提供されたグリッド又は格子を用いてパターニングデバイス支持体上に支持されたパターニングデバイスの位置量を連続して決定するように構成されたエンコーダタイプの測定システムとを含むリソグラフィ装置に関する。
(もっと読む)
測定装置及び測定方法
【課題】被測定物を精度良く測定が可能であるとともに、安価な測定装置を提供する。
【解決手段】長尺な被測定物Aの形状を測定する測定装置であって、ベース1と、前記ベース1の一方側に設けたビーム支持部2と、前記ビーム支持部2の上部にピン軸4によって一方側の両側部を支持し、他端側を傾動及び倒立可能に設けたビーム5と、前記ビーム5の一方端に設けられ、前記被測定物Aの一端を支持及び回転可能する支持部6と、前記ビーム5の他方端に移動可能に設けられ、被測定物の他端をクランプ及び回転可能するクランプ部7と、前記ベース1と前記ビーム5との間に設けたビーム傾動及び倒立用のアクチュエータ8と、前記被測定物Aに対向するように、前記ビーム上に移動可能に設けた寸法測定部10とを備える。
(もっと読む)
幾何学的タイヤ測定値のデータ品質を向上させるフィルタリング処理方法
タイヤ測定システムが生のタイヤ測定データ及び変換タイヤ測定データ(例えば、測定された半径方向又は側方回転振れ値のデータセット)をストレージする種々のメモリ/メディア要素並びにコンピュータ実行可能命令の形態をしたソフトウェアを搭載したコンピュータを含み、コンピュータ実行可能命令をプロセッサによって実行し、それにより、得られたデータセットに含まれていて、隣り合う測定値を超えて突き出ている選択された回転振れ値をフィルタリング処理し、フィルタリング処理済み回転振れ値のうちで、かかる値セット全体を包囲している凸包上に位置する選択されたフィルタリング処理済み回転振れ値を識別し、凸包上に位置する回転振れ値のうちの識別された選択回転振れ値の補間を実行してフィルタリング処理済み回転振れ測定値の最終データセットを得る。逆データセットに対して同様なステップを実行してサイドウォール変形特徴部、例えばサイドウォール窪みを一層適切に検出する。 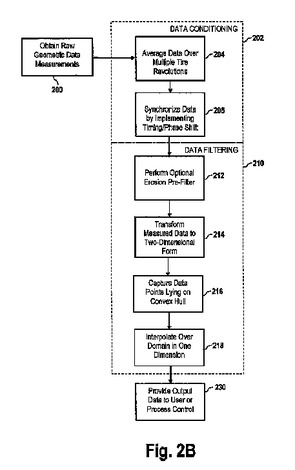 (もっと読む)
(もっと読む)
光学素子設計製造支援システム
【課題】 光学素子製造において、光学素子製品の低コスト、短納期を実現可能とする光学素子設計製造支援システム、および光学素子計測システムを提供する。
【解決手段】 光学有効面設計形状を定義する数式情報を記録したデータと、光学素子全体形状を記録した3DCADデータと、光学素子形状計測に用いる測定治具、雇設計形状を記録した3DCADデータを関連付けて一元管理する。本発明による光学素子設計製造支援システムは、これら設計情報のデータ管理システムと、光学素子や測定治具、雇設計時に実施する設計制約条件自動判定演算手段と、判定結果に基づいた設計製造ワークフロー制御機能を備える。これより、人手が介在することによるデータ処理ミス、および設計制約条件に起因した再設計や再測定といった製造工程の戻りが解消可能となる。
(もっと読む)
ウェブ基準を使用して位相固定したウェブ位置信号
ウェブの移動エンコーダ信号を検知したウェブ基準信号に位相固定すること含む、ウェブ位置の決定を向上させるための手法。基材の長手方向軸に沿って配置された基準が検知され、対応するセンサ信号が生成される。推定ウェブ位置は、1つ以上のエンコーダ信号によって提供される。センサ信号とエンコーダ信号との間の位相差が計算され、位相差に基づいてウェブ位置の誤差が決定される。ウェブ位置の誤差信号は、ウェブ位置の決定の精度を向上させるエンコーダ信号を調整するためにフィードバックすることができる。  (もっと読む)
(もっと読む)
傾き調整方法および傾き調整装置並びにその傾き調整方法において調整されるデバイス
【課題】対向配置された対象物同士の相対的な傾きをを高精度にかつ容易に調整することができる傾き調整の技術を提供することを目的とする。
【解決手段】基板55には第1検出部である電極が形成され、基板56には第2検出部である電極が基板55の電極と対を構成する位置に形成されている。そして、基板55および基板56をステージ部15の保持部29およびヘッド部39の保持部44にそれぞれ保持し、基板55および基板56の電極の対の間の静電容量を検出部50により検出する。そして、検出された静電容量が所定の値になるように、X−Yテーブル制御部52によってX−Yステージ機構11を移動させ、基板55および基板56の相対的な傾きを調整する。
(もっと読む)
ディスクブレーキのピストン変位量測定方法およびその方法に使用する装置
【課題】ロータの両側にピストンを有するピストン対向型ディスクブレーキであっても、正確なピストン変位量を測定可能とする装置を提供する。
【解決手段】ディスクロータを跨いで配置するディスクブレーキのキャリパに、対向する少なくとも1個のシリンダを設け、前記各シリンダに挿入したピストンで摩擦パッドを両側から押圧して前記ディスクロータに摺接しブレーキを働かせるようにしたディスクブレーキにおいて、前記ピストンまたはディスクロータの一方にギャップセンサを設け、そのセンサによりディスクロータまたはピストンとの距離を計測し、ピストンの軸方向の変位量を測定することを特徴とするピストン変位測定方法である。
(もっと読む)
運動推定装置及びプログラム
【課題】簡易な構成で、安定して移動体の運動を精度よく推定することができるようにする。
【解決手段】画像撮像部12によって異なるタイミングで複数の画像を撮像し、運動推定候補算出部20によって、撮像した複数の画像に基づいて、自車両の運動推定候補を複数算出する。また、ジャイロセンサ14によって、自車両のヨー角速度を計測する。信頼度判定部22によって、算出された複数の運動推定候補の各々について、信頼度を判定する。運動検証部26によって、ジャイロセンサ14によって計測されたヨー角速度、及び信頼度判定部22によって判定された複数の運動推定候補の各々の信頼度に基づいて、複数の運動推定候補のうちの何れか1つを、自車両の運動の推定結果として選択する。
(もっと読む)
キャップ検査装置及びキャップ検査方法
【課題】検査対象の容器の大きさが異なる場合でも容易に対応可能なキャップ検査装置を提供する。
【解決手段】口金部101にキャップCPを装着した樽100がコンベア2の搬送経路に沿って搬送され、樽100の上方からキャップCPの天面Uの傾斜を検知するキャップ検査装置1であって、搬送経路の上方に設けられ、天面Uの同一直線上にない3点の測定範囲A1〜A3までの距離を計測する計測ユニット3と、計測ユニット3の計測結果に基づいて、天面Uが傾斜しているか否かを判別する制御装置10と、を備えた。
(もっと読む)
往復動内燃機関作動のための検出装置及び方法、並びに往復動内燃機関
【課題】改良型の往復動内燃機関と、特に往復動内燃機関の作動のための、特にシリンダ滑り面潤滑のための改良潤滑装置及び改良潤滑方法とを提案し、それにより、従来の問題を解決し、かつ往復動内燃機関の作動時の種々の構成要素又は過程の制御及び/又は調整を改善し、特に、シリンダ内への潤滑油供給の最適時点を決定する。
【解決手段】検出装置が、制御ユニット81を有するセンサ装置8を含み、制御ユニット81が、配量装置6と位置センサ82とに信号接続をされ、位置センサ82が作動時にシリンダ4の内室43と測定技術的に連絡することで、作動時にシリンダ4の軸線方向Aでのピストン5の位置Xが位置センサ82によって検出可能であり、往復動内燃機関が、ピストン5の位置Xに応じて制御可能及び/又は調整可能である。
(もっと読む)
レーザスキャナを伴う関節式測定アーム
【課題】レーザスキャナを最適に配置し、スキャナの精度を確保する。
【解決手段】座標測定機器は、第1の端10と、第2の端50と、それらの間の複数の継ぎ合わせアームセグメントと、を有する関節付きアーム20を含む。各アームセグメントは、少なくとも1つの回転軸を定める。レーザスキャナアセンブリは、アームの第2の端に結合され、関節付きアームの最後の回転軸を中心に回転可能である。レーザスキャナアセンブリは、レーザと画像センサとを含む。レーザは、最後の回転軸L1を挟んで画像センサの反対側に位置決めされる。
(もっと読む)
101 - 120 / 642
[ Back to top ]