
Fターム[2F069GG31]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 時間を測定するもの (29)
Fターム[2F069GG31]に分類される特許
1 - 20 / 29
センサベースのオリエンテーションシステム
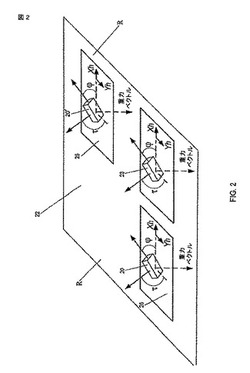
【課題】リニア加速度計を使用して、3つの軸のうちの任意あるいはすべてに関する回転を含むオブジェクトの位置の変化を測定するオリエンテーションシステムを提供する。
【解決手段】6次元の情報、すなわち、3つの次元における平行移動と3つの軸に関する回転について測定し、供給するために、2つの3Dのリニア加速度計20、20’を積分する1つのリニア加速度計23を使用する方法が開示される。2つのリニア加速度計センサは、6自由度における変数のうちの1つ以外のすべてを決定するように使用される。第3の加速度計からの出力は、回転6自由度を決定するために必要なデータを生成する。ヘディングにおける変化(すなわち、ヨーあるいは方位)を検出するためのジャイロスコープの必要性は、それゆえに避けられることができる。
(もっと読む)
鉄道車両アタック角測定装置および方法

【課題】軌間外の建築限界を支障しない箇所に1つのセンサを設置するだけで車輪のレールに対するアタック角を測定することができ、複数のセンサを用いることや、高い精度でのゼロ点調整が不要な、鉄道車両アタック角測定装置および方法を提供する。
【解決手段】レールを走行する鉄道車両の車輪Wが通過する位置が測定範囲となるように設置され、測定点を通過する前記車輪Wまでの距離を連続的に測定するセンサ部12と、前記センサ部12による測定結果を受信して解析する処理部14と、を有し、前記処理部14は、前記センサ部12の測定結果から、前記車両の走行速度と、所定時間における車輪Wまでの距離の変化量を算出し、前記走行速度に前記所定時間を乗じた値と、前記所定時間における車輪Wまでの距離の変化量とから、その車輪の前記レールに対するアタック角を算出する。
(もっと読む)
多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法
【課題】圃場に埋設された複数のセンサユニットの位置を設置後に収集可能な多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法を提供する。
【解決手段】1本の伝送路に固定された複数のセンサユニットそれぞれによって前記伝送路を介して返される応答から、前記各センサユニットが固定された位置から前記伝送路の一端までの伝送路長と前記各センサユニットの固定位置における前記伝送路の屈曲方向に関する情報とを含む情報を抽出する情報抽出部と、前記情報抽出部で抽出された情報に基づいて、前記複数のセンサユニットの配置を推定する配置推定部とを備える。
(もっと読む)
重心高さ計測装置、自動車検査システム、及び重心高さ計測方法
【課題】正確に且つ短時間で物体の重心高さを測定することができる重心高さ計測装置、及び重心高さ計測方法を提供する。
【解決手段】本実施形態に係る重心高さ計測装置40は、振り子の原理により物体の重心高さを計測する重心高さ計測装置40であって、車両(物体)1を搭載する揺動ユニット19と、揺動ユニット19を支持して左右対称な振り子の円弧軌道に沿って揺動させる揺動ガイド28と、揺動ユニット19に応力を与えて揺動ユニット19を揺動させる揺動手段16と、揺動ユニット19の揺動周期を検知する変位センサ(揺動周期検知手段)8と、変位センサ8により検知された揺動周期に基づいて車両1の重心位置を演算する重心位置演算手段10と、を備えて構成されている。
(もっと読む)
球体移動経路の測定方法
【課題】球体の実際の移動状態に近いデータを獲得可能な球体移動経路の測定方法を提供する。
【解決手段】操作ユニットおよび三軸加速度計Cを用意し、三軸加速度計Cと操作ユニットとを接続させ、三軸加速度計Cで測定したデータを操作ユニットに伝送し、測定対象物Oの内部に三軸加速度計Cを置き、三軸加速度計CでXYZ三軸の空間座標を定義し、第一測定時点に三軸の初期位置を確認し、第二測定時点に比較位置を確認し、データを操作ユニットに伝送する。XYZ三軸のそれぞれの比較位置と初期位置との間の角度を比較し、XYZ三軸の軸方向上の力を受けた後の加速度データと、それぞれ軸方向の分力のベクトルと、それぞれ軸に対する旋転力とを算出する。三つの軸方向の加速度値と、測定対象物Oの重量およびサイズとに基づいて、測定対象物Oの初期速度、飛行時間、飛行高度、飛行距離および旋転速度のうちの少なくとも一つのデータを求める。
(もっと読む)
外骨格を有するCMMアーム
【課題】外骨格および伝達手段を有するCMMアームを提供する
【解決手段】 ベース端及びプローブ端を有する内部CMMアームと、複数の伝達手段を介して内部CMMアームを駆動する外骨格とを備える、外骨格を有するCMMアームの装置が提供される。1つ又は複数の接触プローブ、光学プローブ、及び工具が、プローブ端に取り付けられる。外骨格を有するCMMアームは、手動操作可能な実施形態及び自動実施形態で提供される。外骨格を有するCMMアームは、高精度測定のため、又は高精度動作を行うために動作可能である。外骨格を有するCMMアームの動作の方法が提供される。
(もっと読む)
円形の物体のサイズを測定する手段とその方法
【課題】 短い軌道ですばやく円形の物件のサイズを測定することができる円形の物件のサイズを測定する手段とその方法を提供する。
【解決手段】軌道と、第一、第二、第三センサーと、を含んでなり、該第一、第二、第三センサーが、軌道上に直線に配置され、被測定物件が第一、第二、第三センサーを通過した時間点を記録し、第一、第二センサーと、第二、第三センサーの間の距離を基に被測定物件のサイズを算出する。
(もっと読む)
リンクチェーンの伸びの測定方法および装置
【課題】リンクチェーンにおけるリンクの伸びを高精度に測定し、リンクごとに適切なメンテナンスを実施可能なようにして、そのリンクチェーンがフィルム延伸装置に用いられる場合には品質の優れたフィルムを安定に生産できるようにする。
【解決手段】nとmを整数として、複数のリンクが互いに連結されたリンクチェーンにおける、m個のリンクが互いに連結された基準長のリンク部分の始端部と終端部とを一対のセンサによって同じタイミングで検知できるように準備しておき、測定対象となる他のm個のリンクのうちの始端部の第n番のリンクと終端部の第n+m−1番のリンクとを一対のセンサによって検知するとともに、その検知の際に、第n番のリンクの検知タイミングと第n+m−1番のリンクの検知タイミングとの時間差を求め、この時間差とリンクチェーンの移動速度とを用いて、m個の他のリンクについての基準長からの変化量を求める。
(もっと読む)
目標物の位置の時間変化計測方法及び計測装置
【課題】 画像処理によりマークの位置を検出する方法は、処理に時間を要するため、高周波の位置変動を捉えることができない。
【解決手段】 (a)移動する目標物を撮像すると共に、該目標物の加速度を測定する。(b)前記目標物を撮像して得られた画像データに基づいて、該画像データが取得された時刻における該目標物の位置を求める。(c)前記目標物の加速度に基づいて得られる位置情報と、前記画像データが取得された時刻における該目標物の位置とに基づいて、該目標物の位置の時間変化を求める。
(もっと読む)
軌道位置データ付与システム及び軌道位置データ付与方法
【課題】軌道上を走行する車両に設置されたセンサから時系列的に出力される検査値データを軌道位置データと対応付けるのに際して、少ない処理で簡単に行うことができるようにする。
【解決手段】検査値データと同期して、車両上に設置された角速度センサによってヨー角速度を表す角速度データを順次取得して検査値データと共に時系列的に保存し、前記保存した角速度データの中で処理するべき範囲である処理区間を必要に応じて決定し、処理区間における角速度データと軌道管理図の曲線線形図とを比較することにより、処理区間における角速度データと軌道管理図の軌道位置データとの対応付けを行い、軌道位置データと対応付けられた角速度データに基づき、該角速度データと同期する検査値データを該軌道位置データと対応付ける。
(もっと読む)
姿勢・移動軌跡検出装置、検出方法、プログラムおよび記録媒体
【課題】物体に装着したセンサノードからのデータを利用して物体の姿勢および移動軌跡を検出する。
【解決手段】姿勢・移動軌跡検出装置1は、物体が運動しているアクティビティ区間の前後の静止区間のセンサデータから物体の姿勢を静止区間の各々について推定する静止姿勢推定部13と、物体の姿勢に基づいてアクティビティ区間の各時刻における物体の姿勢を補間により推定する運動姿勢推定部14と、アクティビティ区間の各時刻について運動姿勢推定部14が推定した物体の姿勢における重力加速度を推定する重力加速度推定部15と、アクティビティ区間の各時刻についてセンサデータと重力加速度とから、外力により生じる物体の加速度を推定する運動加速度推定部16と、物体の加速度からアクティビティ区間における物体の移動速度および移動量を求める移動軌跡推定部17とを備える。
(もっと読む)
タイヤ摩耗推定方法及びタイヤ摩耗推定装置
【課題】耐久性に優れるとともに、タイヤの摩耗度合を精度よく推定することのできる方法とその装置を提供する。
【解決手段】タイヤのインナーライナー部の内面側に加速度センサ11を設けてタイヤトレッドのタイヤ径方向の加速度波形を検出し、この加速度波形に現れる膨出点に対応する2つのピーク間の時間である変形時間を算出して当該タイヤの接地面外変形範囲の指標である変形長Xを算出するとともに、上記加速度を微分した値の時系列波形である微分波形に現れるトレッドの接地端に対応する2つのピーク間の時間である接地時間を算出して当該タイヤのたわみ量の指標である接地長Lを算出し、この算出された変形長Xと、接地長Lと、予め求めておいたタイヤ摩耗の度合に応じた変形長Xと接地長Lとの関係を示すマップ17Mとに基づいて当該タイヤの摩耗の度合を推定するようにした。
(もっと読む)
実質的に不変な回転軸を検出するための方法および装置
【課題】以前の運動予測システムの欠点を解消し、かつ実質的に不変な回転軸を有する移動体の運動を処理するために特に適している方法を提案する。
【解決手段】3本の感知軸を有する少なくとも1つの慣性または磁気センサを備えている移動体の運動の実質的に不変な回転軸を検出するための方法は、前記センサの3本の感知軸に対する、異なる時間での少なくとも3つのサンプルを含む物理測定値を得るステップE10、E31と、物理測定値空間内で、実質的に不変な回転軸を予測するステップE11−E15、E32−E34と、前記予測された軸を、運動の実質的に不変な回転軸と同定するステップとを含む。実質的に不変な軸周りで回転する移動体の運動を予測するために特に使用される。
(もっと読む)
列車位置検知システム
【課題】この発明の課題は、列車の位置を正確に検知する列車位置検出システムを提供することである。
【解決手段】電線からパンタグラフを介して電力が供給される列車における前記列車の位置を検知するシステムであって、前記パンタグラフ上に設けられ、前記列車の走行中に前記列車と前記電線間の距離変化に追従して動き、垂直方向加速度を検知する加速度センサと、加速度センサが検知した加速度の大きさと規定値とを比較する比較手段と、前記比較手段の比較結果に基づいて、前記電線の支持点を検知する検知手段と、前記列車が走行する所定区間における前記支持点の位置情報を予め記憶している記憶手段と、前記検知手段により検知された支持点の数及び前記記憶手段に記録された前記位置情報に基づいて前記列車の位置を計算する計算手段とを有する。
(もっと読む)
無段変速機用巻掛け部材の周長測定装置および予張装置
【課題】 無段変速機で使用されるチェーンやベルトなどの巻掛け部材の周長を簡単にかつ精度良く決定することを可能にする無段変速機用巻掛け部材の周長測定装置およびこれを備えた予張装置を提供する。
【解決手段】 無段変速機用巻掛け部材の周長測定装置は、巻掛け部材の直線部に対向して所定距離Lをおいて配置され1対のセンサと、巻掛け部材の所定箇所にセンサに対応するように設けられた被検知部と、1対のセンサの出力から被検知部がL移動するのに必要な時間Taを求める第1演算手段と、1対のセンサの出力から被検知部が1周するのに必要な時間Tbを求める第2演算手段とを備えており、L×Tb/Taによってチェーン周長が求められる。
(もっと読む)
車長検出装置
【課題】装置を簡素化でき、車長そのものを検出することができ、車路の狭い場所においても設置条件の制約が少ない車長検出装置を提供する。
【解決手段】本発明の車長検出装置10は、車路1において車両走行方向の第1位置Aにおける車両3の存在を検出する第1センサ11と、第1位置Aから車両走行方向下流側に所定距離Lをおいた第2位置Bにおける車両3の存在を検出する第2センサ12と、第1位置Aと第2位置Bとの離間距離L、離間距離Lを車両3が移動するのに要した時間、及び第1センサ11もしくは第2センサ12が車両3を検出していた時間に基づいて、車長CLを算出する処理装置14と、を備える。
(もっと読む)
有水式ガスホルダの傾斜測定装置及び有水式ガスホルダの傾斜測定方法
【課題】安価な測定装置を用いて外部の環境によらず安定的にガス槽の傾斜を測定できる有水式ガスホルダの傾斜測定装置を提供すること。
【解決手段】水槽と第1〜第3基柱と昇降自在に設けられたガス槽41を備える有水式ガスホルダの傾斜測定装置10を提供する。この傾斜測定装置10は、ガス槽41に対して同一の相対高さで連結された第1〜第3被検知体と、第1基柱の第1高さに配置され第1被検知体の通過を検知する第1センサ11Aと、第1基柱〜第3基柱の第2高さにそれぞれ配置され、対応する第1被検知体〜第3被検知体の通過を検知する第2〜第4センサ11B〜11Dと、ガス槽が上昇又は下降するときに、第1センサ11Aと第2センサ11Bとの検知タイミングの時間差と、第2〜第4センサ11B〜11Dによる検知タイミングと、に基づいてガス槽41の傾斜を算出する傾斜算出手段13と、を含む。
(もっと読む)
角度表示装置
【課題】電動ドリル等で一定の角度で穴あけ加工を行う場合、作業に伴う角度計測、及び加工中の角度計測を同時に行える手段が無く、両手がふさがることで高所作業では危険が伴った。距離センサーと制御回路で構成する片手で操作でき加工中でも角度を視認、計測できる角度表示装置を提案する。
【解決手段】 電動ドリル等の回転軸円周上の上下左右方向に反射型距離センサー1、2、3、4を配置し、反射干渉を防ぐための順次駆動回路5、計測時間比較回路6、計測値表示回路7、上下方向角度表示装置8、左右方向角度表示装置9、電源10、スイッチ11、ハウジング12で構成される角度表示装置。電動ドリルに装着するため片手で操作でき、ドリル軸回転中、暗所、作業者の姿勢、利き腕、加工対象物の傾斜、円筒面、球面に関わらず角度の視認、計測が可能であり、加工中でも角度修正が容易な角度表示装置。
(もっと読む)
変位計異常検出装置
【課題】磁気吸引浮上車の浮上制御に用いられる変位計の異常を浮上制御中であっても検出する。
【解決手段】複数の変位計が備わる複数の浮上力発生手段を備え、変位計41aから周期的に検出信号が出力されることで検出されているレール継目110が検出されなくなることにより、この変位計41aに異常が発生しているものと判断する。
(もっと読む)
形状測定機
【課題】本発明の目的は、表面粗さ測定が適正に行える形状測定機を提供することにある。
【解決手段】ワーク22の評価対象面の断面形状情報を含む測定データを出力する粗さセンサー14と、該ワーク22上の該粗さセンサー14位置を該評価対象面に沿って相対移動させ、その相対移動量を移動分解能Δθピッチでインデックス移動量情報として出力する相対移動機構12と、該粗さセンサー14からの測定データを、該相対移動機構12が移動分解能Δθ移動するのに要する時間よりも短い一定時間間隔tsでサンプリングするタイマーサンプリング手段16と、該相対移動機構12からのインデックス移動量情報に基づき該タイマーサンプリング手段16からの一定時間間隔tsの測定データを間隔定ピッチの測定データとし、該間隔定ピッチの測定データに基づきワーク22の表面粗さを評価するデータ処理機構18と、を備えたことを特徴とする形状測定機10。
(もっと読む)
1 - 20 / 29
[ Back to top ]