
Fターム[2F069NN17]の内容
測定手段を特定しない測長装置 (16,435) | 信号処理 (1,324) | 近似式を求めるもの (241) | 最小二乗法 (60)
Fターム[2F069NN17]に分類される特許
1 - 20 / 60
表面形状の特徴形状抽出演算方法、及び表面形状補正演算方法

【課題】 様々な表面形状に対して比較的に容易に適用可能な特徴形状抽出演算方法及び表面形状補正演算方法を提供することを目的とする。
【解決手段】 この方法は、表面形状測定装置によって測定された被測定物の表面形状を表わす表面形状測定データ点群から、該被測定物の表面形状の所要の特徴形状を表わす特徴形状データ点群を抽出する特徴形状抽出演算方法であって、前記表面形状測定データ点群によって構成される仮想表面に接触可能な二次元もしくは三次元の形状を有する仮想接触子を想定し、前記仮想表面における複数の異なる位置において該仮想接触子を該仮想表面に接触させたことを仮想したときに、各位置において該仮想接触子が接触する前記仮想表面上の1以上の接触点における前記表面形状測定データ点群の中のデータ点を抽出して前記特徴形状データ点群とする特徴形状抽出演算方法である。
(もっと読む)
非接触座標測定機の真直度評価方法および真直度評価装置

【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
挿通孔の閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラム
【課題】蒸気発生器の挿通孔の閉塞率を容易に把握することができる閉塞率評価システム、閉塞率評価方法及び閉塞率評価プログラムを提供する。
【解決手段】本発明の挿通孔の閉塞率評価システムは、伝熱管と、伝熱管を通すための挿通孔が形成された管支持板とを備え、挿通孔が伝熱管が挿入された際にその周方向に形成される複数の隙間部を有する熱交換器に適用され、管支持板は長軸と短軸との比率が1.0以上2.0以下となる範囲内で3次元で楕円形状の模式図で表示され、各々の管支持板は重ならないように直列に配置され、3次元の楕円形状で表示した模式図を挿通孔の閉塞率を調査して得られた挿通孔の閉塞率の値に応じて色分けして表示する可視化処理を有することを特徴とする。
(もっと読む)
有関節座標計測機再配置方法、および有関節座標計測機用レトロリフレクタアセンブリ
【課題】隠れ点を計測できるという有関節CMMの便利さと、より広い空間を計測できるというレーザトラッカの利点とを併せ実現することを目的とする。
【解決手段】対象物の周囲での再配置を容易化する計測装置、システム及び方法を提供する。本システムでは有関節座標計測機(CMM)(200)及びレーザトラッカ(400)を使用し、そのCMM上にはレーザトラッカと対をなすレトロリフレクタ(310,312)を配置する。共通の基準座標系による座標値にCMMによる計測値及びレーザトラッカによる計測値を変換できるためCMMを移動させることができる。更に、レーザトラッカでは計測できない隠れ点を有関節CMM等で計測することができる。
(もっと読む)
3次元寸法測定方法
【課題】タービンロータやタービンケーシングの寸法を、短時間に、高精度で、特別な能力を有することなく測定することが可能な寸法測定方法を提供する。
【解決手段】上記目的を達成するために、本発明は、計測対象を、円筒、平面、および、曲面形状に分割し、円筒、平面、および、曲面形状を含む全体形状をレーザ式3D計測機で、円筒、および、平面形状をレーザ追尾式ハンディー接触式計測機で、また、局所的な曲面形状をレーザ追尾式ハンディー非接触式計測機により用いて計測する。この際、円筒、および、平面形状は、N点計測した結果から求めることで、少量の取得データから形状を測定することが可能となり、データ取得時間のみならずデータ処理時間も大幅に短縮する。
(もっと読む)
座標系整合方法
【課題】製品の設計形状を表現するための設計座標系と、当該製品又はその模型の形状の測定結果を表現するための測定座標系との整合精度の向上を図りうる方法を提供する。
【解決手段】設計座標系における設計にしたがって目標形状を有するように基体が作成される。また、当該基体に対して固定されている模型が作成される。第k種測定平面要素(k=1〜3)のそれぞれを表現する測定点群の座標値に基づき、最小二乗法にしたがって、設計座標系における第k種測定平面要素の姿勢が決定される。当該姿勢に応じた方向に当該測定点群を並進させた結果として、設計座標系における第k姿勢基準点群の座標値が決定される。さらに、第k姿勢基準点群に基づき、最小二乗法にしたがって決定された第k姿勢基準平面に基づいて回転演算子及び並進演算子が決定される。
(もっと読む)
多軸工作機械の幾何誤差の計測方法
【課題】外乱に基づいて不適切な幾何誤差が計測された場合であっても、そのような不適切な幾何誤差に基づく補正の実行により多軸工作機械の加工精度が低下する事態を、きわめて効果的に防止することが可能な幾何誤差の計測方法を提供する。
【解決手段】幾何誤差の計測においては外乱誤差有無確認ステップを実行し、幾何誤差を同定する前に、A軸およびC軸を複数の条件で割り出して、ターゲット球12の直径を計測し、それらの計測値のバラツキを算出し、それらのバラツキが予め設定された直径変動量許容値Daを超えた場合には、計測ミスと判断する。
(もっと読む)
位置計測方法、位置計測システム、及びプログラム
【課題】トータルステーションと比して簡易な装置を用いて、リアルタイムで被計測物の特徴点の位置を計測できる位置計測方法、及び位置計測システムを提供する。
【解決手段】円柱体であるターゲット30の中心位置を計測する位置計測方法であって、レーザ光をターゲット30上で走査してターゲット30上の複数の計測点までの距離を計測するLRF20から、ターゲット30上における複数の計測点の位置情報を取得するステップと、ターゲット30上における複数の計測点の位置情報と、既知情報であるターゲット30の円周面30B上の円弧部及び中心位置の情報とに基づいて、ターゲット30の中心位置を推定するステップと、を備える。
(もっと読む)
移動体位置推定検出システム及び移動体位置推定検出方法
【課題】高精度に移動体の位置等を推定、検出することができるシステム等を提供する。
【解決手段】異なる場所にそれぞれ設置されて、移動体により生じる物理量の信号を検出する複数の磁気検出器1と、各磁気検出器1の検出した信号に対応したパラメータの値を最小自乗法により算出し、パラメータの値に基づいて、各磁気検出器1の検出に係る移動体の位置をそれぞれ算出する位置算出器4A及び4Bと、位置算出器4A及び4Bが算出した位置に基づいて、移動体の位置を推定検出する位置推定検出器10とを備える。
(もっと読む)
鋼管部材の内面めっきの腐食量推定方法
【課題】極めて簡単かつ低コストで測定して、当該測定結果から定量的に腐食速度を求め、さらにn年後の腐食量を推定することができる鋼管部材の内面めっきの腐食量推定方法を提供する。
【解決手段】ある期間毎に鋼管部材全体の厚さ及び外面めっき層の厚さを測定し、これを少なくとも4〜5回行い、各回の測定時の鋼管部材全体の厚さの測定値Aから外面めっきの厚さの測定値Bを減じた値を算出してこれを算出値Cとし、第2回以降の各回の測定時に算出した算出値Cnから第1回の測定時に算出した算出値C1を減じた値が第1回の測定時に対する第2回以降の測定時の内面めっき厚の減少値でありこの絶対値Dnを第2回以降の各回の腐食量とし、これらの腐食量から腐食速度を統計的処理により算出又は推定し、n年後の腐食量を求める。
(もっと読む)
パターン化された構造を測定するための方法およびシステム
パターン化された構造の少なくとも1つのパラメータの測定で使用するための方法およびシステムが提供される。方法は:構造の異なる位置上の測定に対応する複数の測定された信号を含む測定されたデータと、理論的信号と測定された信号との間の関係は、構造の少なくとも1つのパラメータを示す理論的信号を示すデータとを含む入力データを提供する過程と;構造の少なくとも1つの性質を特徴付ける少なくとも1つの選択されたグローバルパラメータに基づきペナルティ関数を提供する過程と;フィッティングプロシージャの前記実行は、理論的信号と測定された信号との間の最適化された関係を決定するために前記ペナルティ関数を使用することと、構造の前記少なくとも1つのパラメータを決定するために最適化された関係を使用することとを含む、理論的信号と測定された信号との間のフィッティングプロシージャを実行する過程と;からなる。 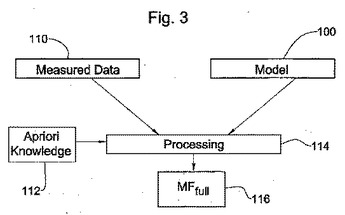 (もっと読む)
(もっと読む)
形状推定システム、角度推定方法及び対象物数推定方法
【課題】2次元平面上の対象物の形状の外周を構成する線分がなす内角を推定する。
【解決手段】複合センサノードは、予め定められた形状をなすように配備され、センシングエリア内における形状推定対象物の有無を検出する複数のセンサと、センサのそれぞれが検出した形状推定対象物の有無を示す検出結果情報をサーバに送信する送信手段とを備え、サーバは、形状推定対象物の頂点の内角がαの場合に、複合センサノードのうち、特定の複合センサノードが形状推定対象物を検出し、その他が検出しないセンシング結果となる複合センサノードの集合の測度を、複合センサノードのパラメータとαから計算する測度計算手段と、測度から内角α1,・・・,αn(nは内角の数)である場合のセンシング結果の期待値を計算する期待値計算手段と、センシング結果と期待値の差分を小さくする内角α1,・・・,αnを探索する探索手段とを備える。
(もっと読む)
標識検定装置
【課題】標識検出器と組み合わせて用いられる標識の、検出原理上の回転対称性の程度を評価するための標識検定装置を、提供する。
【解決手段】標識検定装置は、装着部により検定対象の標識を回転軸部材に装着して、駆動部によって回転軸部材に所定の周期運動を与えた場合に、標識検出器から得られた標識の検出データを、処理部に入力し、処理部のデータ処理によって標識の検出原理上の軸対称性の指標データを検定データとして得る。
(もっと読む)
表面形状の測定方法
【課題】プローブを用いて、容易かつ高精度に被検物の表面形状を測定することができる表面形状の測定方法を提供する。
【解決手段】プローブと被検物とを相対移動させることにより、被検物の表面形状を測定する表面形状測定方法は、被検物の第1の領域の第1表面形状データを取得する第1取得工程と、第1表面形状データと少なくとも一部が重複する被検物の第2の領域の第2表面形状データを取得する第2取得工程と、第1表面形状データのうち、第2表面形状データと重複する領域のデータに対して、近似関数による当てはめを行って近似曲線を取得する近似曲線取得工程S20と、近似曲線を用いて第2表面形状データの補正量を算出する補正量算出工程S30と、算出された補正量に基づいて、第2表面形状データ全体を座標変換する座標変換工程S40と、第1表面形状データと、座標変換が行われた第2表面形状データとを統合する工程とを備える。
(もっと読む)
誤差伝播による出力データの精度評価方法
【課題】出力データの精度評価を、理論的で、簡単な計算で行え、計算量が少なく、収束計算を行う必要が無く、データ処理を行う多くのソフトウェアに適用可能であり、誤差の要因の分析、要因毎の大きさの比較等の多くの解析が可能となるようにする。
【解決手段】データ処理を入力データによって数値微分することで、データ処理のヤコビ行列Jを求める手順(ステップ110)と、入力データの持つ誤差の分散共分散を推定して、入力データの誤差行列Dを求める手順(ステップ120)と、前記ヤコビ行列J及び入力データの誤差行列Dより、出力データの持つ誤差の分散共分散を表す誤差行列Rを計算する手順(ステップ130)と、を含む。
(もっと読む)
面形状測定機、面形状測定方法、及び面形状の測定値の解析方法
【課題】軸を中心として回転対称な非球面部材における非球面の輪郭形状の測定において、軸を挟んだ対称な有効径の範囲全体を対象とすることなく、短い時間で輪郭形状の誤差を高精度に測定可能な面形状測定機、測定方法及び面形状の測定値の解析方法を提供する。
【解決手段】軸Aを挟んだ非対称な範囲Mにおいて、軸Aの一方の側の所定位置から他方の側の別の所定位置までの非球面の輪郭形状を測定し、範囲Mにおける非球面の輪郭形状の測定値を用いて、測定値を得ていない軸Aを挟んだ他方の側の所定範囲に仮測定値として補完し、次いで、軸Aを挟んだ非対称な範囲と仮測定値を補完された範囲とを合わせた範囲において、測定値と仮測定値と非球面の輪郭形状の設計値とを用いて、所定の収束条件を満たすまで収束計算を行なうことにより、非球面の輪郭形状の誤差を算出する。
(もっと読む)
測定方法及び測定装置
【課題】繋ぎ合わせ演算を高精度に行うことが可能な測定方法を提供する。
【解決手段】本発明の測定方法は、被測定物を複数の部分領域に分割して測定し、複数の部分領域を繋ぎ合わせて被測定物の全体形状を測定する測定方法であって、複数の部分領域を測定するステップS501〜S511と、基準となる部分領域における誤差を固定するステップS102と、複数の部分領域における各誤差を算出するステップS105と、各誤差に応じた補正を行って複数の部分領域を繋ぎ合わせるステップS107とを有し、ステップS102〜S107は、基準となる部分領域を変えて繰り返し実行される(S110)。
(もっと読む)
曲形部材の加工完成度評価システム及びその方法
【課題】加工中又は加工済みの曲形部材の曲面成形過程で曲面の加工精度を確認し、加工後の形状を評価し判断できる曲形部材の加工完成度評価方法を提供する。
【解決手段】本発明に係る曲形部材の加工完成度評価方法は、計測装置により加工中又は加工済みの曲面形状を計測する段階と、計測された曲面形状のデータと設計された曲面形状のデータを入力して表面及びポイントを生成する段階と、船体製造工程のマージン部位及び面取り作業の特定の制約条件を反映して設計された曲面形状と計測された曲面形状とを整合する曲面整合段階と、曲面間の誤差量を計算する段階と、曲面形状の加工完成度を評価する段階とを含む。
(もっと読む)
形状評価装置、形状評価方法および形状評価プログラム
【課題】非球面形状の数式フィッティングとアライメント補正との両方の最適解を容易に得ること。
【解決手段】本発明は、軸対称非球面形状を設計形状とした被評価非球面形状の座標データを測定する測定部10と、測定部10によって測定して得た座標データから非球面式の各係数を求め、当該係数による非球面の形状について並進、回転の座標移動変換、c(曲率)、k(コーニック係数)の係数変更の少なくともひとつを実施し、設計形状との形状差を算出する座標変換計算部231と、座標変換計算部231によって算出される形状差が最小となる並進、回転、c、kの値を非線形最小二乗法によって求める非線形最小二乗計算部232と、非線形最小二乗計算部で並進、回転、c、kの値の少なくともひとつを変更するたびに、形状差が最小となるA(非球面係数)を線形最小二乗法によって算出する線形最小二乗計算部233とを有する形状評価装置である。
(もっと読む)
ユークリッド対称性認識システム、方法及びプログラム
【課題】対象物品の計測メッシュからユークリッド対称性認識を行うユークリッド対称性認識システムを提供する。
【解決手段】本発明は、計測メッシュに対してメッシュ各頂点の主曲率を計算し、メッシュ各頂点の主曲率を用いて、平面領域の境界近傍にある頂点集合を特徴領域として抽出し、特徴領域群から形状が一致するシード特徴領域ペアを抽出し、ICP法とRegion Growing法により同一の変換パラメータでマッピング可能な頂点ペアを逐次的に各シード特徴領域に追加することで特徴領域ペアを拡大し、互いにユークリッド対称な領域ペアとそれらの変換パラメータを抽出し、ユークリッド対称な領域ペアから平面反射、回転若しくは平行移動で表現できる領域ペアを見出し、当該領域ペアと共に対称性を表現するシステムを特徴とする。
(もっと読む)
1 - 20 / 60
[ Back to top ]